Clear Sky Science · zh
将交通规则与多样运动行为融合用于路口轨迹预测
为何更聪明的路口很重要
繁忙的路口对自动驾驶汽车来说是最棘手的场景之一。汽车、公交、非机动车和行人向多个方向移动,常常在瞬间对交通信号和彼此做出反应。本研究提出了一种让计算机预测这些道路使用者如何通过路口的新方法,旨在使自动驾驶在现实城市交通中更安全、更顺畅。
车辆与行人在真实世界中的运动方式
在典型路口,驾驶员不仅关注正前方的车辆。他们还会监控可能横穿其路径的其他车道上的车辆,同时交通信号决定何时起步、停止或转向。骑行者和摩托车手有时通过信号的方式与汽车不同,行人则以较慢速度向多个方向穿行。标准的预测系统往往把所有附近道路使用者一视同仁,并经常忽略信号时序,这使得预测实际发生的复杂动作组合变得困难。
将转向车道和信号转为注意力地图
作者提出了名为 TITP 的模型,试图模仿人类驾驶员对路口的心理组织方式。他们从一个有向图开始,编码车道规则:哪些车道汇入哪些车道,以及哪些车辆最可能相互影响。在该方案中,处于红灯等待的车辆会强烈关注当绿灯亮起时将首先在其车道前进的那辆车,而对无关车道中远处的车辆则关注较少。这个“车道规则图”帮助系统聚焦最相关的邻车,并捕捉不对称影响,例如快速迎面而来的车辆即使不在并列车道,也会强烈影响转向车辆。 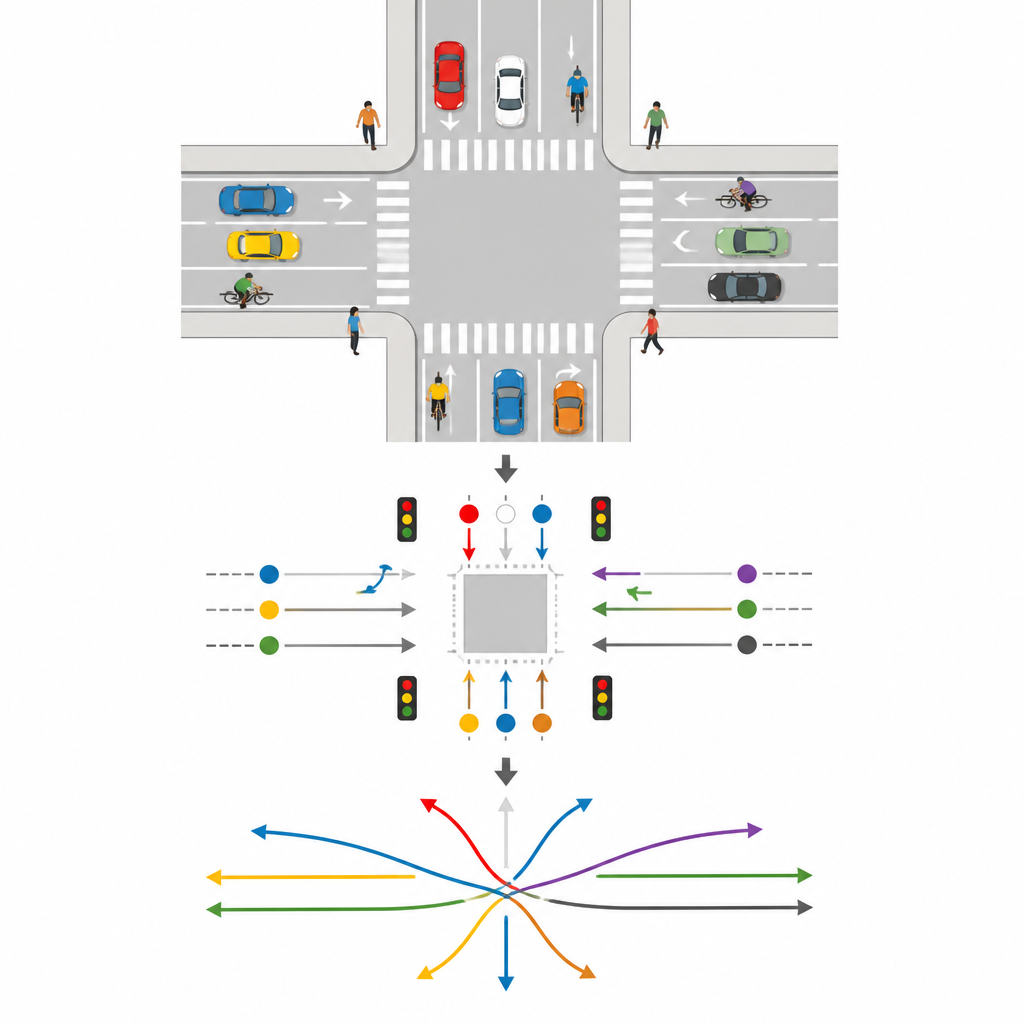
把交通灯读作未来动作
接着,模型将交通灯状态转换为可能的运动动作。TITP 并不把红绿灯简单视为开/关信号,而是将每种状态映射为一组合法动作:直行、停车、左转或右转。例如,在研究场景中,红灯下车辆在法律上可能选择停车或右转,而绿灯则允许所有四种动作。系统将这些模板动作与每辆车的近期运动进行比较,并用学习模块选择最有可能的动作。通过这种方式,变换的灯色被翻译为暗示每位驾驶者即将行动的序列。
同时捕捉多种运动风格
即便有了车道规则和信号,也不存在完全相同的两个道路使用者。为处理这种多样性,TITP 不依赖单一的运动模式。相反,它使用若干统计形状,称为 t 分布,每个分布针对一种特定行为:停车、直行、左转、右转或作为行人行走。有些行为(例如受转向约束的汽车)在主路径周围紧密聚集,而其他行为(如四处徘徊的行人)则在多种可能方向上散布更广。通过调整每个分布的散布程度,模型既能描述稳定、可预测的驾驶,也能描述更不规则的运动。
在真实城市数据上测试模型
研究者在两套大规模真实交通数据集上评估了 TITP,包括中国一处由无人机记录的路口数据集和来自美国的商业城市驾驶数据集。他们将系统与二十多种使用循环网络、图网络和生成模型等工具的近期预测方法进行了比较。在短期与长期预测以及多种道路使用者类型上,TITP 的位置误差均小于对手方法。可视化个例研究表明,新模型更好地捕捉了绿灯时的突发加速、细微的转向动作以及绕行行人的规避动作,而旧模型常常假设的速度更慢或路径更直。
这对未来自动驾驶汽车意味着什么
对普通读者来说,关键的信息是:机器可以学会像人类驾驶员那样“思考”路口,通过关注最相关的车辆、遵循信号逻辑并允许多种不同的运动风格。TITP 表明,将交通规则与灵活的运动模式结合,能更准确地预测汽车、骑行者和行人的去向。这类轨迹预测的改进是朝向能够在复杂城市街道中安全、顺畅行驶的自动驾驶车辆迈出的重要一步。
引用: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
关键词: 自动驾驶, 轨迹预测, 交通路口, 交通信号, 车道规则