Clear Sky Science · tr
Kavşaklarda yol kuralları ve çeşitli hareket davranışlarını birleştirerek yol eğrisi tahmini
Neden daha akıllı kavşaklar önemli?
Yoğun kavşaklar, kendi kendine giden araçlar için en zorlu yerlerden biridir. Arabalar, otobüsler, bisikletler ve yayalar pek çok yönde hareket eder ve genellikle trafik ışıklarına ve birbirlerine milisaniyeler içinde tepki verirler. Bu çalışma, bilgisayarların bu yol kullanıcılarının bir kavşakta nasıl hareket edeceğini öngörmesini sağlayan yeni bir yaklaşım sunuyor; amaç gerçek şehir trafiğinde otonom sürüşü daha güvenli ve akıcı hale getirmek.
Araçlar ve insanların gerçek dünyada nasıl hareket ettiği
Tipik bir kavşakta sürücüler yalnızca önlerindeki araca bakmazlar. Yolu kesebilecek diğer şeritlerdeki araçları da izlerler; aynı zamanda trafik ışıkları ne zaman başlayacak, duracak veya döneceklerini bildirir. Bisikletçiler ve motosikletliler bazen ışıklara araçlardan farklı biçimlerde yaklaşır, yayalar ise yavaş hızlarda çok yönlü gezinir. Standart tahmin sistemleri genellikle tüm yakın yol kullanıcılarını aynı şekilde ele alır ve sıklıkla sinyal zamanlamasını görmezden gelir; bu da gerçekte ortaya çıkan zengin eylem karışımını tahmin etmeyi zorlaştırır.
Şeritleri ve işaretleri dikkat haritasına dönüştürmek
Yazarlar, insan sürücülerin bir kavşağı zihinsel olarak nasıl düzenlediklerine benzer şekilde çalışmaya çalışan TITP adlı bir model öneriyor. Şerit kurallarını kodlayan yönlendirilmiş bir grafik ile başlıyorlar: hangi şeritlerin hangi şeritlere bağlandığı ve hangi araçların birbirini en çok etkileyebileceği. Bu düzenlemede, kırmızı ışıkta bekleyen bir araç, ışık yeşile döndüğünde şeridinde ilk hareket edecek araca güçlü dikkat verirken, alakasız şeritlerdeki uzak araçlara daha az dikkat eder. Bu "şerit kuralı grafiği" sistemin en ilgili komşulara odaklanmasına ve simetrik olmayan etkileşimleri yakalamasına yardımcı olur; örneğin, yan yana olmasalar bile hızlı gelen bir yolcu aracının dönen bir aracı güçlü biçimde etkilemesi gibi. 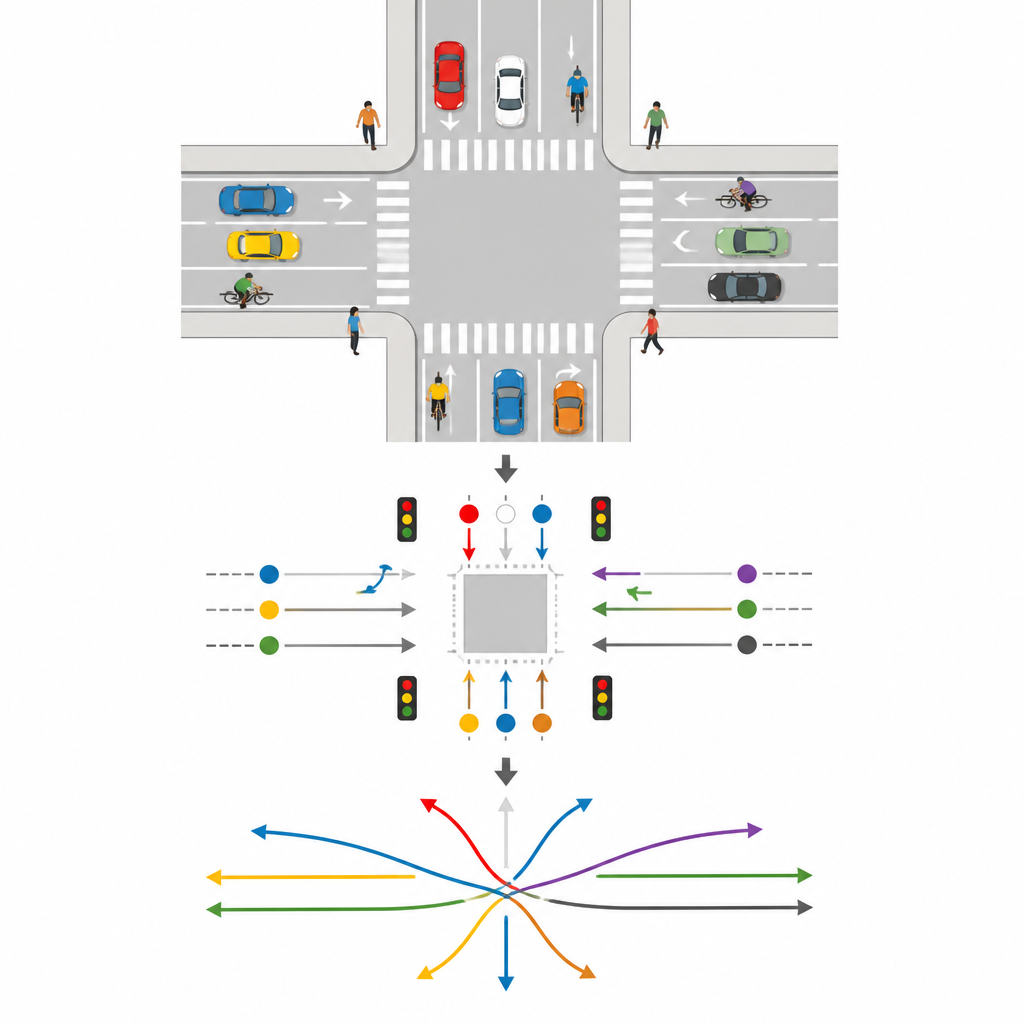
Trafik ışıklarını gelecekteki eylemler olarak okumak
Sonra model, trafik ışığı durumlarını olası hareket eylemlerine dönüştürür. Kırmızı veya yeşil bir ışığı basit bir açık/kapalı sinyali olarak ele almak yerine, TITP her durumu düz gitme, durma, sola dönme veya sağa dönme gibi yasal hareket setlerine eşler. Örneğin, çalışılan ortamda kırmızı ışık altında bir araç yasal olarak durabilir veya sağa dönebilirken, yeşil ışık dört eyleme de izin verir. Sistem bu şablon eylemleri her aracın son hareketleriyle karşılaştırır ve hangi eylemin en olası olduğunu seçmek için bir öğrenme modülü kullanır. Bu şekilde ışıkların değişen renkleri, her sürücünün yakında ne yapacağına dair ipucu veren bir diziye çevrilir.
Aynı anda birçok hareket tarzını yakalamak
Şerit kuralları ve sinyaller olsa bile, iki yol kullanıcısı aynı şekilde hareket etmez. Bu çeşitliliği ele almak için TITP tüm hareketler için tek bir modele dayanmaz. Bunun yerine durma, düz gitme, sola dönme, sağa dönme veya yaya olarak yürüme gibi belirli davranışlara uyarlanmış birkaç istatistiksel şekil (t-dağılımları olarak bilinen) kullanır. Direksiyonla sınırlı araçlar gibi bazı davranışlar ana yol etrafında sıkıca kümelenirken, gezinme yapan yayalar gibi diğerleri birçok olası yönde daha geniş dağılır. Her dağılımın yayılımını ayarlayarak model hem istikrarlı, tahmin edilebilir sürüşü hem de daha düzensiz hareketleri tanımlayabilir.
Modeli gerçek şehir verilerinde test etmek
Araştırmacılar TITP'yi Çin'de drone ile kaydedilmiş bir kavşak veri kümesi ve ABD'den ticari bir kentsel sürüş veri kümesi dahil olmak üzere iki büyük gerçek trafik koleksiyonunda değerlendirdi. Sistemi yinelemeli ağlar, grafik ağları ve üretici modeller gibi araçlar kullanan yirmi kadar güncel tahmin yöntemiyle karşılaştırdılar. Kısa ve uzun vadeli tahminlerde ve birçok yol kullanıcısı türü için TITP rakip yaklaşımlardan daha küçük konum hataları üretti. Görsel vaka incelemeleri, yeni modelin ışık yeşile döndüğünde ani hızlanmaları, ince dönüş hareketlerini ve yayaların etrafındaki kaçınma manevralarını daha iyi yakaladığını gösterdi; eski modeller ise sıklıkla olduğundan daha yavaş hızlar veya daha düz yollar varsaydı. 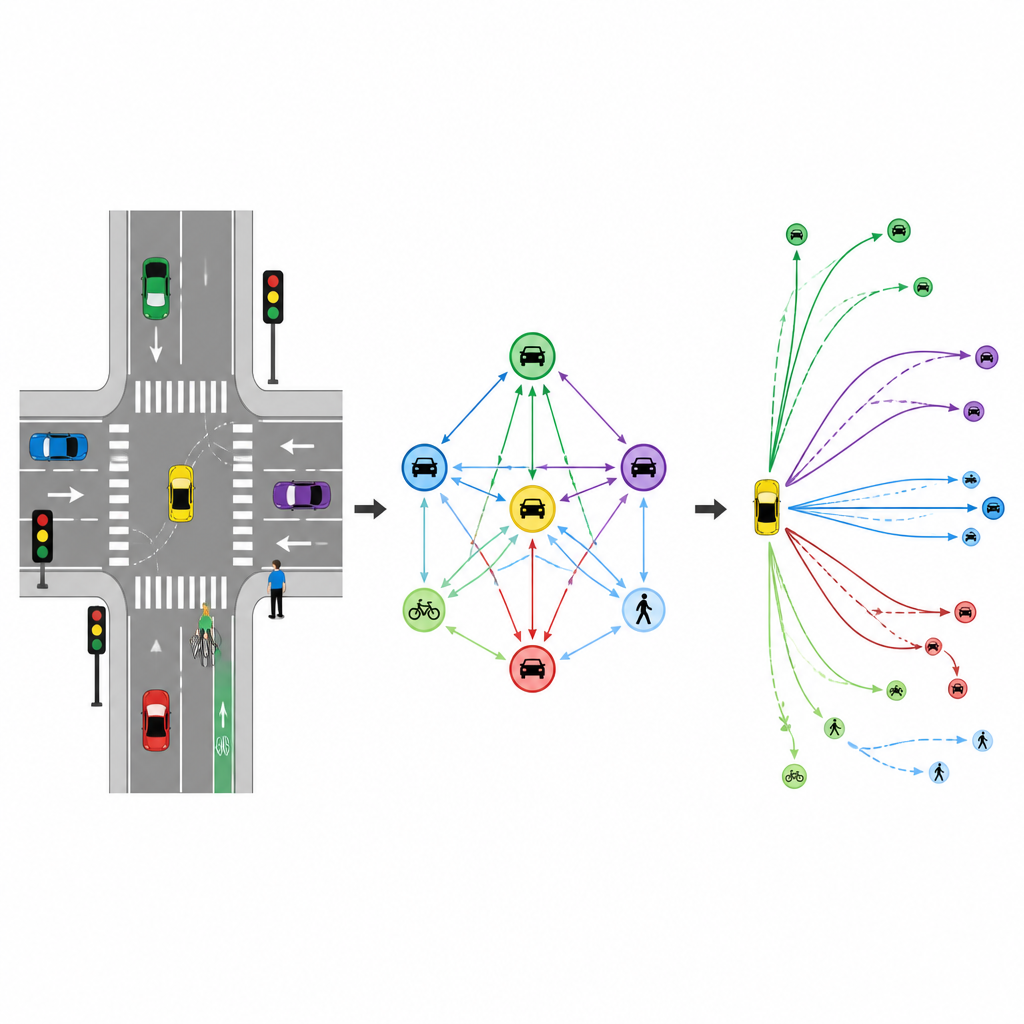
Geleceğin otonom araçları için anlamı
Genel okuyucu için ana mesaj, makinelerin kavşakları insan sürücüler gibi "düşünmeyi" öğrenebileceği; en ilgili araçlara dikkat ederek, sinyal mantığına uyarak ve birçok farklı hareket tarzına izin vererek. TITP, trafik kurallarını esnek hareket kalıplarıyla harmanlamanın arabaların, bisikletçilerin ve yayaların bir sonraki adımlarını daha doğru tahmin etmeye yol açtığını gösteriyor. Yol eğrisi tahminindeki bu tür gelişmeler, karmaşık şehir sokaklarında güvenli ve akıcı hareket edebilen otonom araçlara doğru atılmış önemli bir adımdır.
Atıf: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Anahtar kelimeler: otonom sürüş, yol eğrisi tahmini, trafik kavşakları, trafik sinyalleri, şerit kuralları