Clear Sky Science · pl
Fuzjonowanie zasad ruchu i różnorodnych zachowań ruchu dla przewidywania trajektorii na skrzyżowaniach
Dlaczego inteligentniejsze skrzyżowania są ważne
Zajęte skrzyżowania to jedne z najtrudniejszych miejsc do obsługi przez samochody autonomiczne. Samochody, autobusy, rowery i piesi poruszają się w wielu kierunkach, często reagując w ułamkach sekundy na sygnalizację i na siebie nawzajem. W tym badaniu przedstawiono nowy sposób, w jaki komputery mogą przewidywać ruch wszystkich użytkowników drogi na skrzyżowaniu, z celem uczynienia jazdy zautomatyzowanej bezpieczniejszą i płynniejszą w rzeczywistym ruchu miejskim.
Jak pojazdy i ludzie poruszają się w rzeczywistości
Na typowym skrzyżowaniu kierowcy nie obserwują jedynie pojazdu bezpośrednio przed sobą. Monitorują też pojazdy na innych pasach, które mogą przeciąć ich tor jazdy, podczas gdy światła drogowe mówią, kiedy ruszać, zatrzymać się lub skręcać. Rowerzyści i motocykliści czasem przejeżdżają przez światła w sposób różny od samochodów, a piesi poruszają się powoli w wielu kierunkach. Standardowe systemy prognozowania zwykle traktują wszystkich użytkowników ruchu jednakowo i często ignorują harmonogram sygnalizacji, co utrudnia przewidzenie bogatej mieszanki zachowań, które faktycznie mają miejsce.
Przekształcanie pasów i sygnałów w mapę uwagi
Autorzy proponują model o nazwie TITP, który stara się odzwierciedlić, jak ludzie mentalnie organizują obserwację skrzyżowania. Zaczynają od skierowanego grafu kodującego zasady pasa ruchu: które pasy prowadzą do których innych i które pojazdy najbardziej na siebie wpływają. W tym schemacie samochód stojący na czerwonym świetle przykłada dużą wagę do pierwszego pojazdu, który ruszy przed nim na jego pasie, a mniejszą do odległych pojazdów na niezwiązanych pasach. Ten „graf zasad pasa” pomaga systemowi skupić się na najistotniejszych sąsiadach i uchwycić asymetryczny wpływ, na przykład szybki nadjeżdżający samochód, który silnie wpływa na pojazd skręcający, nawet gdy nie stoją obok siebie. 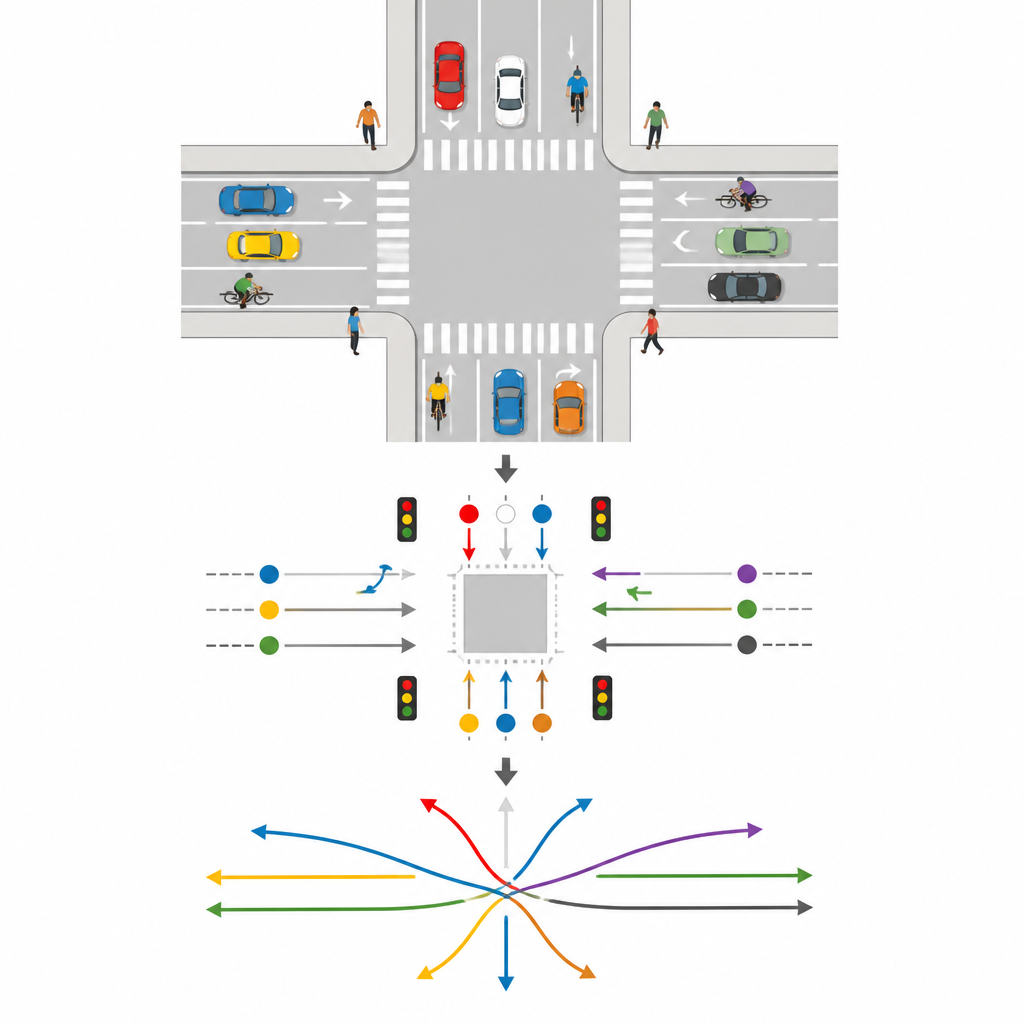
Odczytywanie sygnalizacji świetlnej jako przyszłych działań
Następnie model przekształca stany sygnalizacji świetlnej w prawdopodobne akcje ruchowe. Zamiast traktować czerwone lub zielone światło jako prosty sygnał on/off, TITP odwzorowuje każdy stan na zestaw dozwolonych ruchów: jazdę na wprost, zatrzymanie, skręt w lewo lub skręt w prawo. Na przykład przy czerwonym świetle w badanym scenariuszu samochód może legalnie się zatrzymać lub wykonać skręt w prawo, podczas gdy zielone światło pozwala na wszystkie cztery działania. System porównuje te szablonowe akcje z niedawnym ruchem każdego pojazdu i używa modułu uczącego się do wyboru najbardziej prawdopodobnej akcji. W ten sposób zmieniające się kolory świateł zostają przetłumaczone na sekwencję sugerującą, co każdy kierowca wkrótce zrobi.
Uchwycenie wielu stylów ruchu jednocześnie
Nawet z zasadami pasa i sygnalizacją, żaden użytkownik ruchu nie porusza się dokładnie tak samo jak inny. Aby poradzić sobie z tą różnorodnością, TITP nie polega na jednym wzorcu dla całego ruchu. Zamiast tego używa kilku statystycznych rozkładów t, z których każdy jest dostrojony do konkretnych zachowań: zatrzymania, jazdy na wprost, skrętu w lewo, skrętu w prawo lub poruszania się jako pieszy. Niektóre z tych zachowań, takie jak pojazdy ograniczone sterowaniem, skupiają się ciasno wokół głównej ścieżki, podczas gdy inne, jak wędrujący piesi, rozprzestrzeniają się na wiele możliwych kierunków. Poprzez regulację rozrzutu każdego rozkładu model potrafi opisać zarówno stałą, przewidywalną jazdę, jak i bardziej nieprzewidywalne ruchy.
Testowanie modelu na rzeczywistych danych miejskich
Naukowcy ocenili TITP na dwóch dużych zbiorach rzeczywistego ruchu, w tym na danych ze skrzyżowań rejestrowanych dronem w Chinach oraz komercyjnym zbiorze danych z jazd miejskich ze Stanów Zjednoczonych. Porównali swój system z dwudziestoma kilkoma niedawnymi metodami predykcji wykorzystującymi narzędzia takie jak sieci rekurencyjne, sieci grafowe i modele generatywne. Zarówno w krótkoterminowych, jak i długoterminowych prognozach oraz dla wielu typów uczestników ruchu TITP osiągnął mniejsze błędy położenia niż konkurencyjne podejścia. Wizualne studia przypadków pokazały, że nowy model lepiej uchwycił nagłe przyspieszenia po zapaleniu się zielonego światła, subtelne ruchy skrętu i manewry omijające pieszych, podczas gdy starsze modele często zakładały wolniejsze prędkości lub prostsze trajektorie niż miało to miejsce w rzeczywistości. 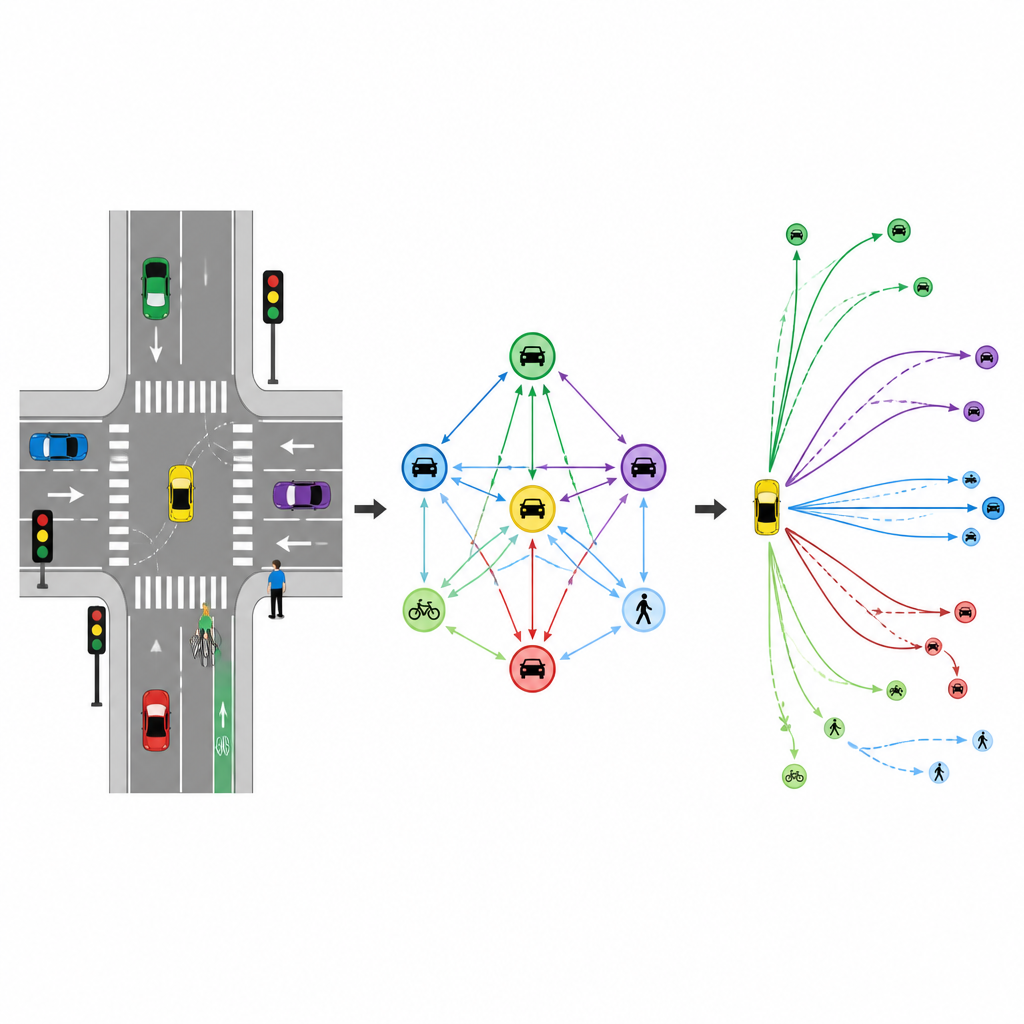
Co to oznacza dla przyszłych samochodów autonomicznych
Dla czytelnika ogólnego kluczowe przesłanie jest takie, że maszyny mogą nauczyć się „myśleć” o skrzyżowaniach bardziej jak kierowcy — poprzez zwracanie uwagi na najistotniejsze pojazdy, przestrzeganie logiki sygnalizacji i uwzględnianie wielu odmiennych stylów ruchu. TITP pokazuje, że połączenie zasad ruchu z elastycznymi wzorcami ruchu prowadzi do dokładniejszych przewidywań, dokąd pojadą samochody, rowerzyści i piesi. Takie ulepszenia w przewidywaniu trajektorii są ważnym krokiem w kierunku zautomatyzowanych pojazdów, które będą mogły poruszać się bezpiecznie i płynnie po skomplikowanych ulicach miast.
Cytowanie: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Słowa kluczowe: autonomiczne prowadzenie, przewidywanie trajektorii, skrzyżowania drogowe, sygnalizacja świetlna, zasady pasa ruchu