Clear Sky Science · de
Verschmelzung von Verkehrsregeln und vielfältigen Bewegungsverhalten zur Trajektorienvorhersage an Kreuzungen
Warum intelligentere Kreuzungen wichtig sind
Belebte Kreuzungen gehören zu den anspruchsvollsten Stellen für selbstfahrende Autos. Autos, Busse, Fahrräder und Fußgänger bewegen sich in viele Richtungen und reagieren oft in Sekundenbruchteilen auf Ampeln und aufeinander. Diese Studie stellt einen neuen Ansatz vor, mit dem Computer vorhersagen können, wie sich all diese Verkehrsteilnehmer durch eine Kreuzung bewegen werden, mit dem Ziel, automatisiertes Fahren im realen Stadtverkehr sicherer und flüssiger zu machen.
Wie sich Fahrzeuge und Menschen in der realen Welt bewegen
An einer typischen Kreuzung beobachtet ein Fahrer nicht nur das direkt vor ihm fahrende Fahrzeug. Er achtet auch auf Fahrzeuge in anderen Spuren, die seinen Weg kreuzen könnten, während Ampeln signalisieren, wann gestartet, gestoppt oder abgebogen werden darf. Radfahrer und Motorradfahrer fahren manchmal anders durch Ampeln als Autos, und Fußgänger schlendern in vielen Richtungen mit geringer Geschwindigkeit. Standardvorhersagesysteme behandeln meist alle umliegenden Verkehrsteilnehmer gleich und ignorieren häufig die Signalisierungszeiten, was es schwer macht, die vielfältigen Handlungen vorherzusagen, die tatsächlich stattfinden.
Fahrspuren und Signale als Aufmerksamkeitskarte
Die Autoren schlagen ein Modell namens TITP vor, das versucht, die Art und Weise nachzubilden, wie menschliche Fahrer sich mental eine Kreuzung strukturieren. Sie beginnen mit einem gerichteten Graphen, der Fahrbahnregeln kodiert: welche Fahrspuren in welche anderen münden und welche Fahrzeuge sich am wahrscheinlichsten gegenseitig beeinflussen. In diesem Schema richtet ein Auto, das an einer roten Ampel wartet, starke Aufmerksamkeit auf das erste Fahrzeug in seiner Spur, das bei Grün vorwärtsfahren wird, und weniger auf entfernte Fahrzeuge in nicht verwandten Spuren. Dieser „Fahrspurenregel-Graph“ hilft dem System, die relevantesten Nachbarn zu fokussieren und asymmetrische Einflüsse zu erfassen, etwa ein schnell herannahendes Auto, das ein abbiegendes Fahrzeug stark beeinflusst, auch wenn sie nicht nebeneinander stehen. 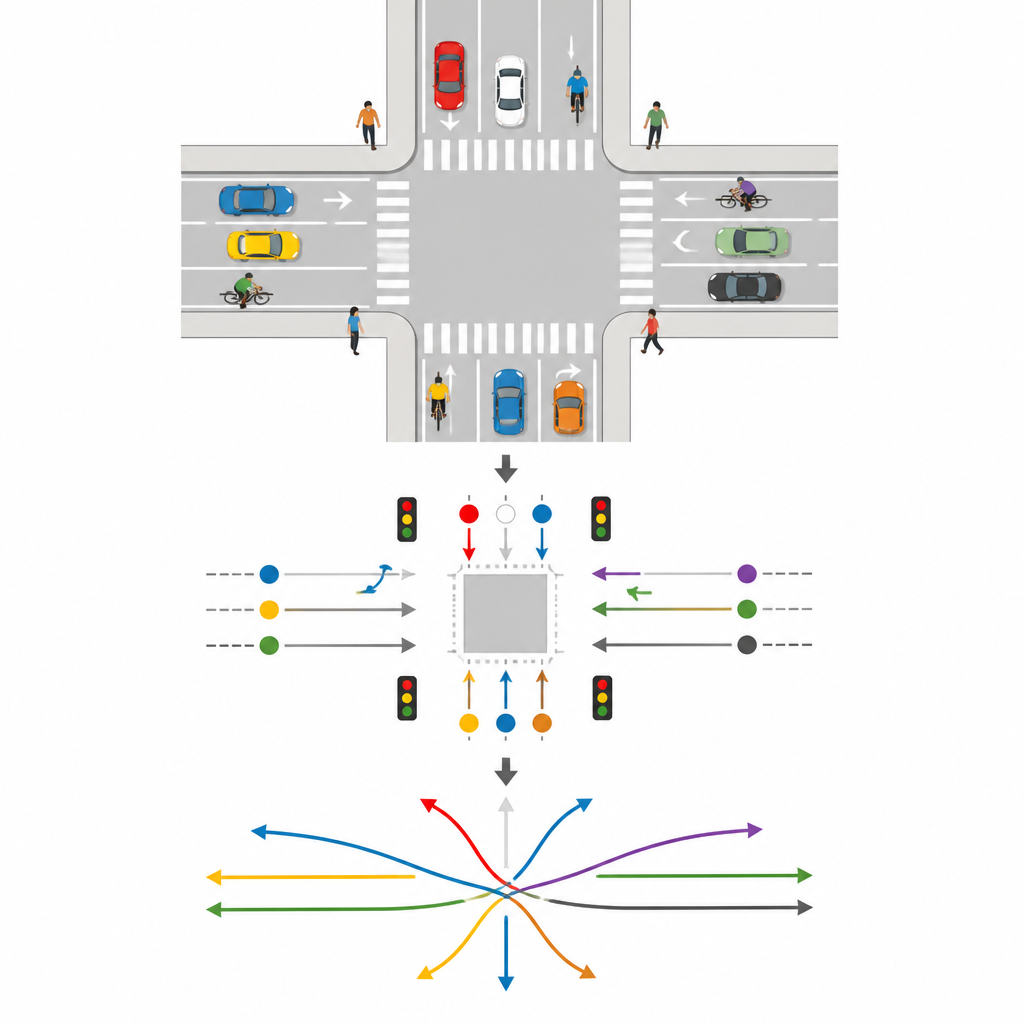
Ampeln als Anzeichen für zukünftige Aktionen lesen
Als Nächstes wandelt das Modell Ampelzustände in wahrscheinliche Bewegungsaktionen um. Anstatt Rot oder Grün als einfache Ein/Aus-Signale zu behandeln, ordnet TITP jedem Zustand eine Menge erlaubter Manöver zu: geradeaus fahren, anhalten, links abbiegen oder rechts abbiegen. Beispielsweise kann unter Rot in der untersuchten Umgebung ein Auto rechtlich anhalten oder rechts abbiegen, während Grün alle vier Aktionen zulässt. Das System vergleicht diese Vorlagenaktionen mit der jüngsten Bewegung jedes Fahrzeugs und nutzt ein Lernmodul, um zu wählen, welche Aktion am wahrscheinlichsten ist. Auf diese Weise werden die wechselnden Farben der Ampeln in eine Sequenz übersetzt, die andeutet, was jeder Fahrer bald tun wird.
Viele Bewegungsstile gleichzeitig erfassen
Selbst mit Fahrbahnregeln und Signalen bewegen sich keine zwei Verkehrsteilnehmer exakt gleich. Um diese Vielfalt abzubilden, verlässt sich TITP nicht auf ein einziges Muster für alle Bewegungen. Stattdessen verwendet es mehrere statistische Formen, bekannt als t-Verteilungen, von denen jede auf ein spezifisches Verhalten abgestimmt ist: Anhalten, geradeaus fahren, links abbiegen, rechts abbiegen oder als Fußgänger gehen. Einige dieser Verhaltensweisen, etwa bei Fahrzeugen, die durch Lenkung eingeschränkt sind, gruppieren sich eng um einen Hauptpfad, während andere, wie umherwandernde Fußgänger, sich über viele mögliche Richtungen verteilen. Durch das Anpassen der Streuung jeder Verteilung kann das Modell sowohl gleichmäßiges, vorhersehbares Fahren als auch unvorhersehbarere Bewegungen beschreiben.
Test des Modells an echten Stadtdaten
Die Forschenden haben TITP an zwei großen Sammlungen realer Verkehrsdaten bewertet, darunter ein per Drohne aufgenommenes Kreuzungsdatensatz in China und ein kommerzielles städtisches Fahrsdatensatz aus den Vereinigten Staaten. Sie verglichen ihr System mit zwei Dutzend jüngerer Vorhersagemethoden, die Werkzeuge wie rekurrente Netze, Graphnetze und generative Modelle verwenden. Sowohl bei Kurz- als auch bei Langzeitprognosen und für viele Arten von Verkehrsteilnehmern erzeugte TITP geringere Positionsfehler als konkurrierende Ansätze. Visuelle Fallstudien zeigten, dass das neue Modell plötzliches Beschleunigen beim Umschalten auf Grün, subtile Kurvenbewegungen und Ausweichmanöver um Fußgänger besser erfasste, während ältere Modelle oft langsamere Geschwindigkeiten oder geradlinigere Wege annahmen, als tatsächlich vorkamen. 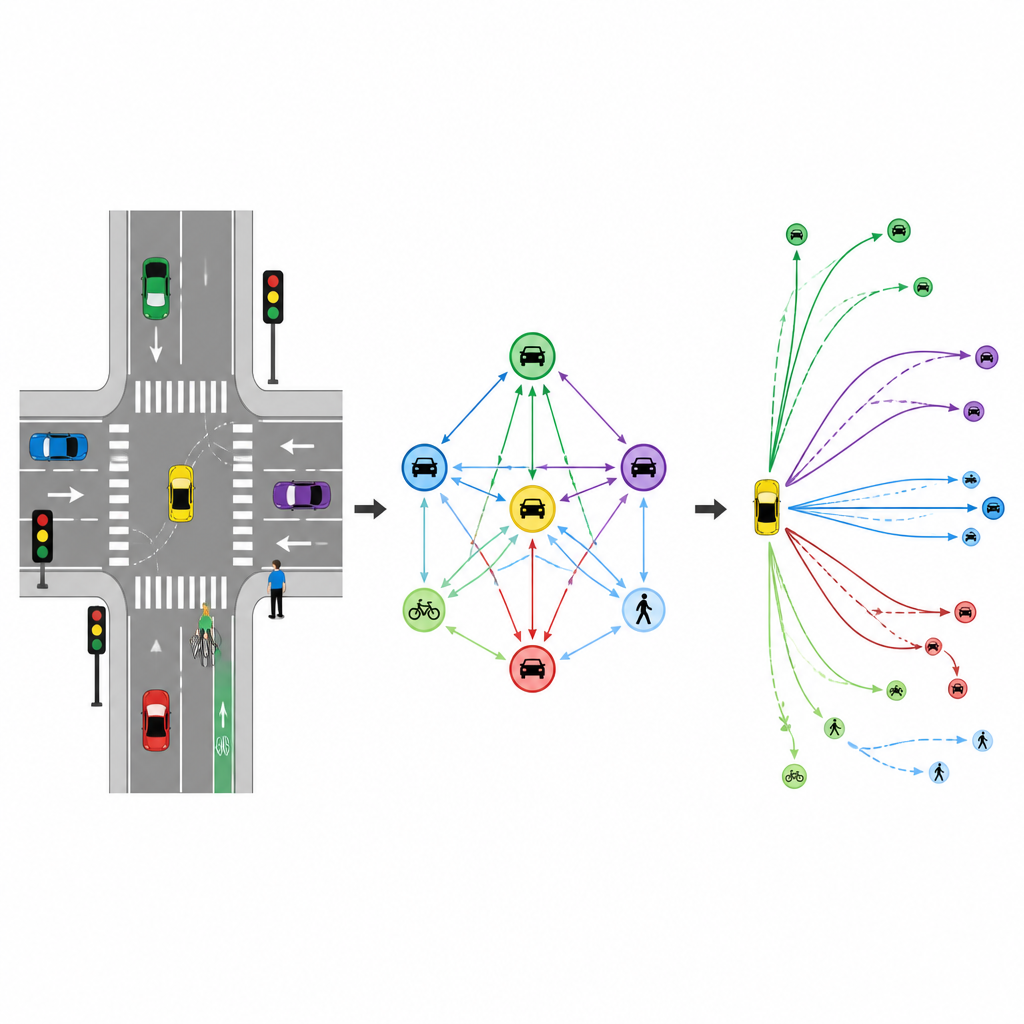
Was das für zukünftige selbstfahrende Autos bedeutet
Für eine allgemeine Leserschaft ist die Kernbotschaft, dass Maschinen lernen können, über Kreuzungen eher wie menschliche Fahrer „nachzudenken“, indem sie den relevantesten Fahrzeugen Aufmerksamkeit schenken, die Logik der Signale berücksichtigen und viele unterschiedliche Bewegungsstile zulassen. TITP zeigt, dass die Verbindung von Verkehrsregeln mit flexiblen Bewegungsmustern zu genaueren Vorhersagen darüber führt, wohin Autos, Radfahrer und Fußgänger als Nächstes fahren werden. Solche Verbesserungen in der Trajektorienvorhersage sind ein wichtiger Schritt hin zu automatisierten Fahrzeugen, die sich sicher und flüssig durch komplexe Stadtstraßen bewegen können.
Zitation: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Schlüsselwörter: autonomes Fahren, Trajektorienvorhersage, Verkehrskreuzungen, Verkehrssignale, Fahrbahnregeln