Clear Sky Science · he
מיזוג כללי תנועה והתנהגויות תנועה מגוונות לחיזוי מסלולים בצמתים
מדוע צמתים חכמים חשובים
צמתים עמוסים הם מהאתרים המאתגרים ביותר עבור רכבים אוטונומיים. מכוניות, אוטובוסים, אופניים והולכי רגל נעים בכיוונים שונים, לעתים קרובות מגיבים לרמזורים ולאחד לשני בשברירי שנייה. מחקר זה מציג שיטה חדשה שמאפשרת למחשבים לצפות כיצד כל משתמשי הדרך ינועו דרך צומת, במטרה להפוך את הנהיגה האוטומטית לבטוחה וחלקה יותר בתנועת עיר אמיתית.
כיצד כלי רכב ואנשים נעים בעולם האמיתי
בצומת טיפוסי, הנהגים לא מסתכלים רק על הרכב שמולם. הם גם עוקבים אחרי כלי רכב בנתיבים אחרים שעשויים לחתוך את דרכם, בעוד שרמזורים אומרים מתי להתחיל, לעצור או לפנות. רוכבי אופניים וקטנועים לפעמים עוברים ברמזורים באופן שונה מרכבים, והולכי רגל נעים באטיות ובכיוונים שונים. מערכות חיזוי סטנדרטיות נוטות להתייחס לכל משתמש דרך בקרבה באותו אופן ולעתים מתעלמות מתזמון האיתות, מה שמקשה על חיזוי המגוון העשיר של הפעולות שמתרחשות בפועל.
הפיכת נתיבי פניה ואיתותים למפת תשומת לב
המחברים מציעים מודל שנקרא TITP שמנסה להתאים לאופן שבו נהגים אנושיים מארגנים מנטלית את הצומת. הם מתחילים עם גרף מכוון שמקודד כללי נתיבים: אילו נתיבים מזינים אילו נתיבים אחרים, ואילו כלי רכב סביר שישפיעו זה על זה. בסכמה זו, רכב החונה ברמזור אדום נותן תשומת לב חזקה לרכב הראשון שיתקדם בנתיב שלו כשהרמזור יהפוך לירוק, ופחות תשומת לב לכלי רכב מרוחקים בנתיבים לא קשורים. "גרף כללי הנתיב" הזה מסייע למערכת למקד את תשומת הלב בשכנים הרלוונטיים ביותר וללכוד השפעה אסימטרית, כמו רכב מהיר מתקרב שמשפיע בחוזקה על רכב פונה, גם אם הם אינם זה לצד זה. 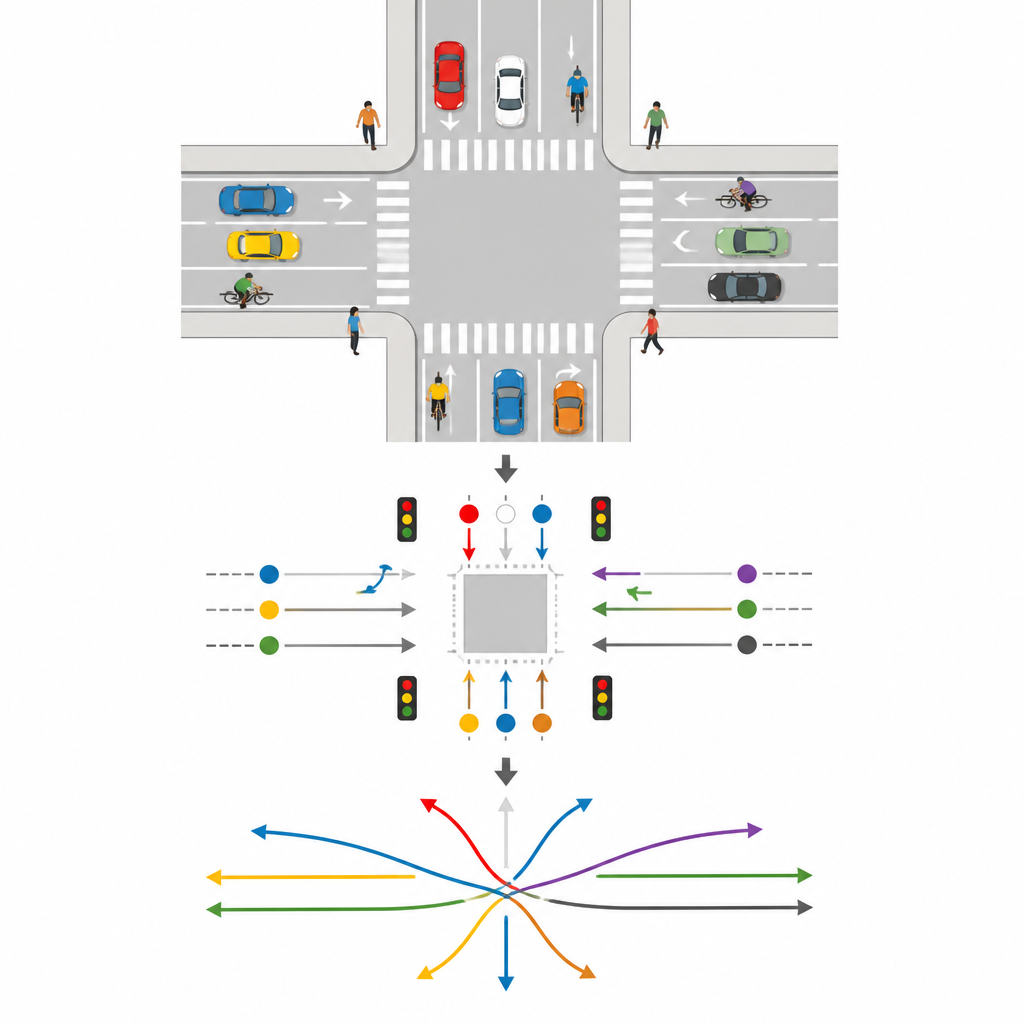
קריאת רמזורים כפעולות עתידיות
בהמשך, המודל ממיר מצבי רמזור לפעולות תנועה סבירות. במקום להתייחס לאור אדום או ירוק כאות פשוט של פתח/סגור, TITP ממפה כל מצב לקבוצת מהלכים חוקיים: ישר, עצירה, פנייה שמאלה או פנייה ימינה. למשל, בתאורה אדומה בהגדרות הנחקרות רכב רשאי לעצור או לבצע פנייה ימינה, בעוד שאור ירוק מאפשר את כל ארבעת הפעולות. המערכת משווה תבניות אלה לתנועה האחרונה של כל רכב ומשתמשת במודול למידה כדי לבחור איזו פעולה סבירה ביותר. כך, שינויי צבע ברמזורים מתורגמים לרצף שמרמז מה כל נהג ככל הנראה יעשה בקרוב.
לכידת סגנונות תנועה מרובים במקביל
גם עם כללי נתיב ואיתותים, אין שני משתמשי דרך שנעים בדיוק באותו אופן. כדי להתמודד עם המגוון הזה, TITP אינו מסתמך על תבנית יחידה עבור כל התנועה. במקום זאת הוא משתמש במספר צורות סטטיסטיות, הידועות כהתפלגויות t, כל אחת מותאמת להתנהגות מסוימת: עצירה, נסיעה ישרה, פנייה שמאלה, פנייה ימינה, או הליכה כהולך רגל. חלק מההתנהגויות, כגון רכבים המוגבלים ביכולת ההיגוי, מצטופפות בחוזקה סביב מסלול מרכזי, בעוד אחרות, כמו הולכי רגל נודדים, מתפזרות על פני כיוונים רבים. על ידי כוונון הפיזור של כל התפלגות, המודל יכול לתאר גם נהיגה יציבה וניתנת לחיזוי וגם תנועה מרגיזה יותר.
בדיקת המודל על נתוני עיר אמיתיים
החוקרים העריכו את TITP על שתי אוספות גדולות של תנועה אמיתית, כולל מאגר צמתים שצולם במזל"ט בסין ומאגר נהיגה עירוני מסחרי מארצות הברית. הם השוו את המערכת שלהם עם שתי תריסר שיטות חיזוי עדכניות המשתמשות בכלים כגון רשתות חוזרות, גרפים וגישות גנרטיביות. בכל תחזיות לטווח קצר וארוך ועבור סוגי משתמשים רבים, TITP הפיק שגיאות מיקום קטנות יותר מהשיטות המתחרות. מחקרי מקרה ויזואליים הראו שהמודל החדש תפס טוב יותר האצות פתאומיות כשאור הרמזור הפך לירוק, תנועות פניה עדינות ותמרונים להימנעות מהולכי רגל, בעוד שמודלים ישנים נוטים לשער מהירויות איטיות יותר או מסלולים ישרים יותר ממה שהתרחש בפועל. 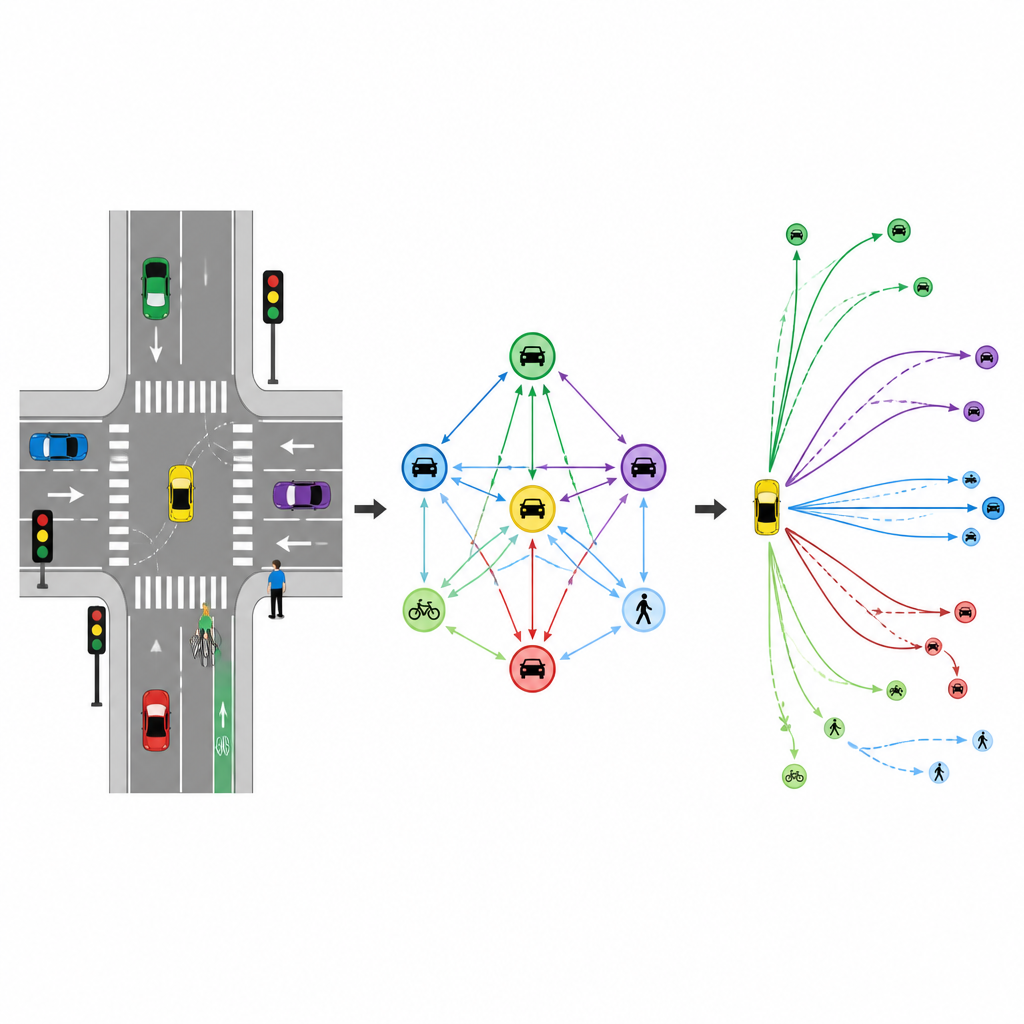
מה המשמעות עבור רכבים אוטונומיים עתידיים
לקורא הכללי, המסר המרכזי הוא שמכונות יכולות ללמוד "לחשוב" על צמתים יותר כמו נהגים אנושיים, על ידי מתן תשומת לב לרכבים הרלוונטיים ביותר, ציות ללוגיקת האיתות, ואפשרות לסגנונות תנועה רבים ושונים. TITP מראה ששילוב כללי תנועה עם דפוסי תנועה גמישים מוביל לשערות מדויקות יותר לגבי לאן מכוניות, רוכבים והולכי רגל ילכו הלאה. שיפורים כאלה בחיזוי מסלולים הם צעד חשוב לקראת כלי רכב אוטומטיים שיכולים לנוע בבטחה ובחלקות ברחובות עירוניים מורכבים.
ציטוט: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
מילות מפתח: נהיגה אוטונומית, חיזוי מסלולים, צמתים תעבורתיים, איתותי תנועה, כללי נתיב