Clear Sky Science · ja
交通規則と多様な運動挙動を融合した交差点での軌跡予測
なぜ賢い交差点が重要なのか
混雑した十字路は自動運転車にとって最も扱いの難しい場所の一つです。車やバス、自転車、歩行者が多方向に移動し、しばしば信号や互いの動きに瞬時に反応します。本研究は、こうした道路利用者全員が交差点内でどのように動くかを予測する新しい方法を紹介し、実際の都市交通における自動運転の安全性と滑らかさ向上を目指しています。
現実の世界での車両と人の動き
典型的な交差点では、運転者は前方の車だけを見ているわけではありません。進路を横切る可能性のある他車線の車両も監視し、信号が発進や停止、右左折のタイミングを示します。自転車やオートバイは車とは異なるタイミングで信号を通過することがあり、歩行者は低速でさまざまな方向にふらつきます。従来の予測システムは近くのすべての道路利用者を同一に扱い、信号タイミングを無視することが多く、実際に展開する多様な行動の混合を予測するのが難しくなります。
車線と信号を注意の地図に変える
著者らは、人間の運転者が交差点を心の中で整理する方法に近づけようとするTITPというモデルを提案します。まず、どの車線がどの車線につながるか、どの車両が互いに影響を与えやすいかを符号化した有向グラフで車線ルールを表現します。この仕組みでは、赤信号で待つ車は、信号が青に変わったときに自車線で先に動くであろう最初の車に強く注意を向け、無関係な車線の遠くの車両にはあまり注意を払いません。この「車線ルールグラフ」は、最も関連性の高い近傍に焦点を当て、対称でない影響を捉えるのに役立ちます。例えば、速く向かってくる車は並走していなくても旋回車に強い影響を与えることがあります。 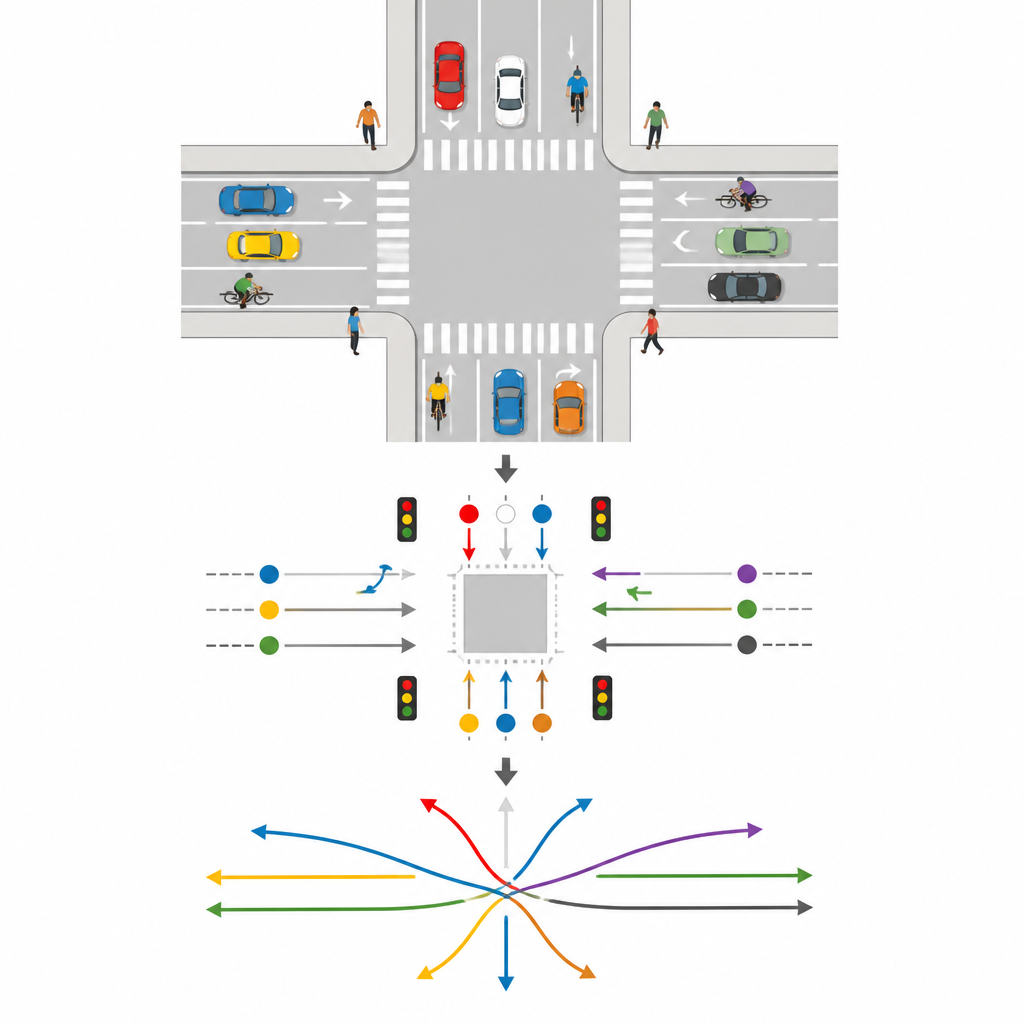
信号を将来の行動として読み取る
次に、モデルは信号の状態を可能性の高い運動行動に変換します。赤や青を単純なオン/オフの信号として扱う代わりに、TITPは各状態を直進、停止、左折、右折といった一連の合法的な動作テンプレートにマッピングします。たとえば、本研究の設定では赤信号下で車は合法的に停止するか右折することがあり、青信号では4つすべての動作が許されます。システムはこれらのテンプレート動作と各車両の最近の運動を比較し、学習モジュールを使ってどの行動が最もありそうかを選びます。こうして、信号の色の変化は各運転者が間もなく何をするかを示唆する一連のシーケンスへと翻訳されます。
多様な運動スタイルを同時に捉える
車線ルールと信号があっても、同じ動きをする道路利用者はいません。この多様性に対処するため、TITPはすべての動きを単一のパターンに頼りません。代わりに、停止、直進、左折、右折、歩行者のような特定の行動に調整された複数の統計的形状(t分布)を使用します。操舵に制約される車のように主要な経路の周りに密集する挙動もあれば、ふらつく歩行者のように方向が広がる挙動もあります。各分布の広がりを調整することで、モデルは安定して予測可能な走行からより不規則な動きまでを記述できます。
実際の都市データでのモデル検証
研究者らは中国のドローン記録による交差点データセットや米国の商用都市走行データセットを含む2つの大規模な実交通コレクションでTITPを評価しました。再帰ネットワーク、グラフネットワーク、生成モデルなどを用いる二十数件の最近の予測手法と比較しました。短期・長期の予測、および多種の道路利用者にわたって、TITPは他の手法より位置誤差が小さい結果を出しました。可視化したケーススタディでは、信号が青に変わったときの急加速、微妙な旋回動作、歩行者回避のような挙動を新しいモデルがよりよく捉えており、従来モデルは実際より遅い速度やより直線的な経路を仮定することが多かったことが示されました。 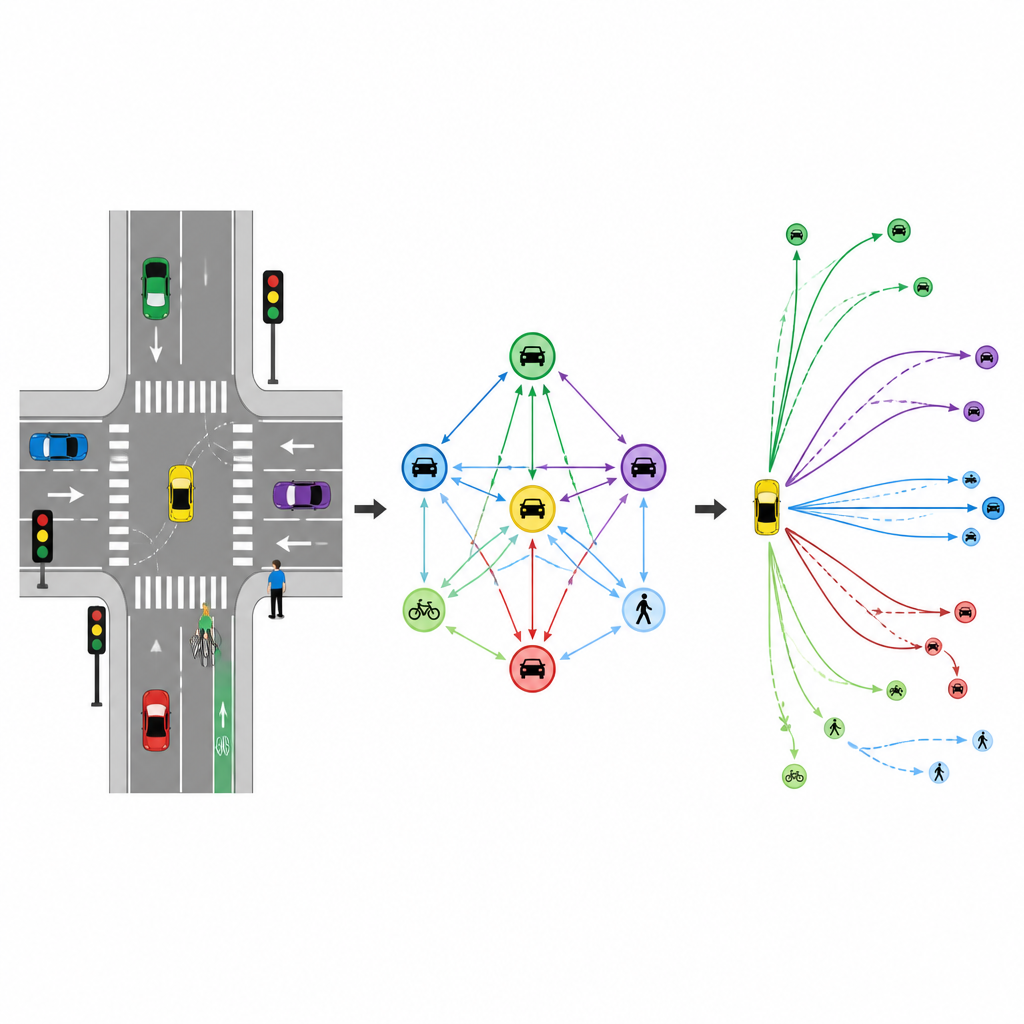
将来の自動運転車にとっての意義
一般読者にとっての主要なメッセージは、機械は最も関連のある車両に注意を払い、信号の論理を尊重し、多様な運動スタイルを許容することで、交差点について人間の運転者に近い「考え方」を学べるということです。TITPは交通規則と柔軟な運動パターンを組み合わせることで、車や自転車、歩行者が次にどこへ行くかをより正確に推測できることを示しています。このような軌跡予測の改善は、複雑な市街地を安全かつ滑らかに走行できる自動運転車への重要な一歩です。
引用: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
キーワード: 自動運転, 軌跡予測, 交通交差点, 交通信号, 車線規則