Clear Sky Science · ru
Объединение правил движения и разнообразия поведенческих моделей для предсказания траекторий на перекрёстках
Почему умные перекрёстки важны
Оживлённые перекрёстки — одни из самых сложных участков для систем автономного вождения. Автомобили, автобусы, велосипеды и пешеходы движутся в разных направлениях, часто реагируя на светофоры и друг на друга за доли секунды. В этом исследовании предложен новый подход, позволяющий компьютерам предвидеть, как все эти участники будут перемещаться через перекрёсток, с целью сделать автоматическое вождение безопаснее и плавнее в городских условиях.
Как транспорт и люди двигаются в реальном мире
На обычном перекрёстке водители смотрят не только на машину прямо перед собой. Они также отслеживают транспорт в соседних полосах, который может пересечь их путь, а светофоры указывают, когда можно ехать, останавливаться или поворачивать. Велосипедисты и мотоциклисты иногда проезжают на свои собственные манёвры, отличающиеся от привычных автомобильных, а пешеходы движутся медленно в разных направлениях. Стандартные системы предсказания, как правило, обращаются со всеми участниками одинаково и часто игнорируют время переключения сигналов, что затрудняет предсказание богатого набора действий, который действительно разворачивается.
Преобразование полос и сигналов в карту внимания
Авторы предлагают модель TITP, стремящуюся имитировать то, как люди мысленно структурируют перекрёсток. Они начинают с ориентированного графа, кодирующего правила полос: какие полосы переходят в какие и какие транспортные средства наиболее вероятно влияют друг на друга. В этой схеме автомобиль, ожидающий на красный свет, уделяет сильное внимание первой машине, которая поедет вперёд по его полосе при смене сигнала, и меньше — далёким транспортным средствам в не связанных полосах. Этот «граф правил полос» помогает системе фокусироваться на наиболее релевантных соседях и учитывать несимметричное влияние, например быстрый встречный автомобиль, который сильно влияет на поворачивающее транспортное средство, даже если они не находятся бок о бок. 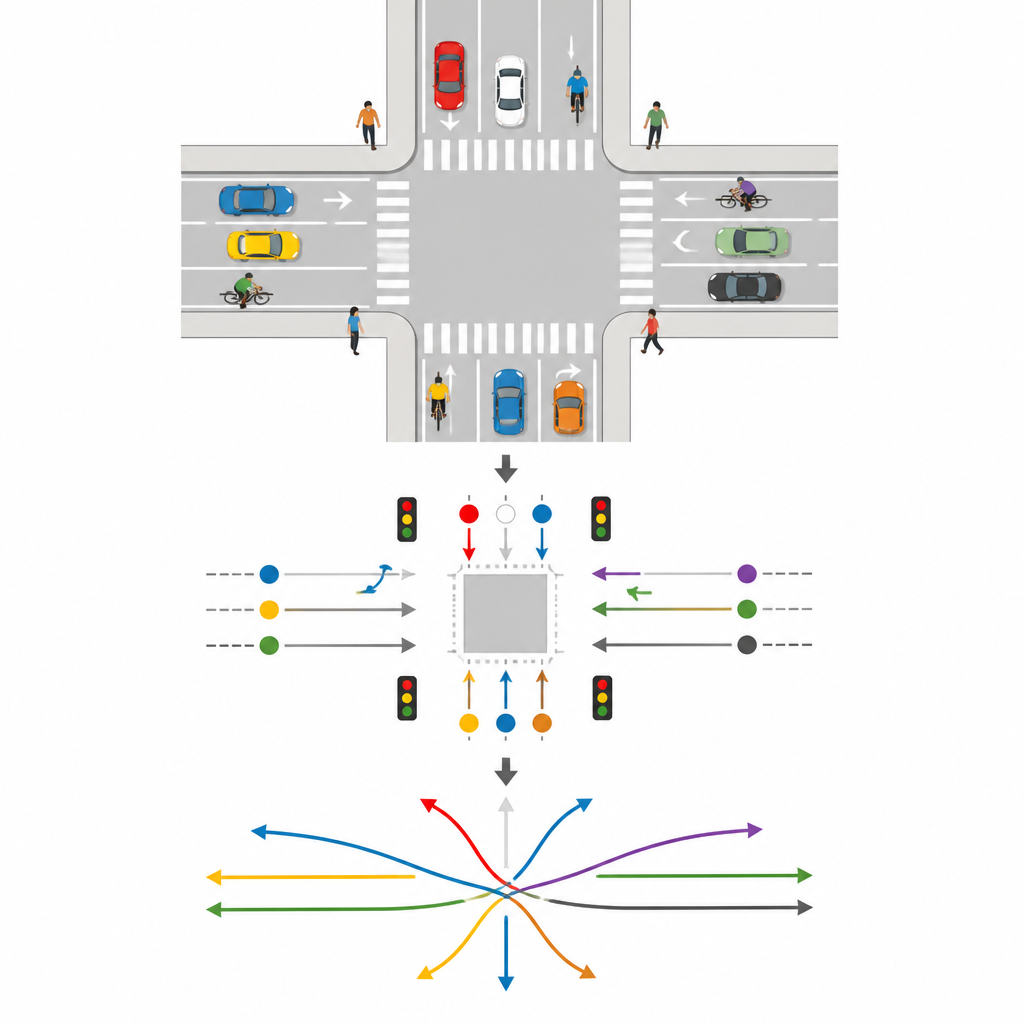
Чтение светофоров как будущих действий
Далее модель преобразует состояния светофора в вероятные варианты движения. Вместо того чтобы рассматривать красный или зелёный как простую бинарную метку, TITP сопоставляет каждое состояние с набором допустимых манёвров: движение прямо, остановка, поворот налево или направо. Например, в рассматриваемой обстановке при красном свете автомобиль может законно остановиться или повернуть направо, тогда как при зелёном доступны все четыре варианта. Система сравнивает эти шаблонные действия с недавним движением каждого транспортного средства и использует обучаемый модуль для выбора наиболее вероятного действия. Так изменение цвета светофора переводится в последовательность, дающую подсказку о том, что вскоре сделает каждый водитель.
Учет множества стилей движения одновременно
Даже с учётом правил полос и сигналов нет двух одинаковых стилей движения. Чтобы справиться с этим разнообразием, TITP не опирается на один универсальный шаблон. Вместо этого модель использует несколько статистических форм, известных как t-распределения, каждое настроенное под конкретное поведение: остановка, движение прямо, поворот налево, поворот направо или ходьба пешехода. Некоторые из этих типов поведения, например автомобили, ограниченные рулевым управлением, концентрируются плотно вокруг основной траектории, тогда как другие, как блуждающие пешеходы, распределяются по множеству возможных направлений. Изменяя разброс каждого распределения, модель может описывать как устойчивую, предсказуемую езду, так и более непредсказуемые перемещения.
Тестирование модели на реальных городских данных
Исследователи оценивали TITP на двух больших наборах реальных дорожных данных, включая датасет перекрёстков, снятых дроном в Китае, и коммерческий набор городского вождения из США. Они сравнили свою систему с двумя десятками современных методов предсказания, использующих такие инструменты, как рекуррентные сети, графовые сети и генеративные модели. Как для краткосрочных, так и для долгосрочных прогнозов и для разных типов участников движения, TITP показал меньшие ошибки в позиционировании по сравнению с соперниками. Визуальные примеры показали, что новая модель лучше уловила резкие ускорения при переключении светофора на зелёный, тонкие поворотные движения и объездные манёвры у пешеходов, тогда как старые модели часто предполагали более медленные скорости или более прямые траектории, чем происходило на самом деле. 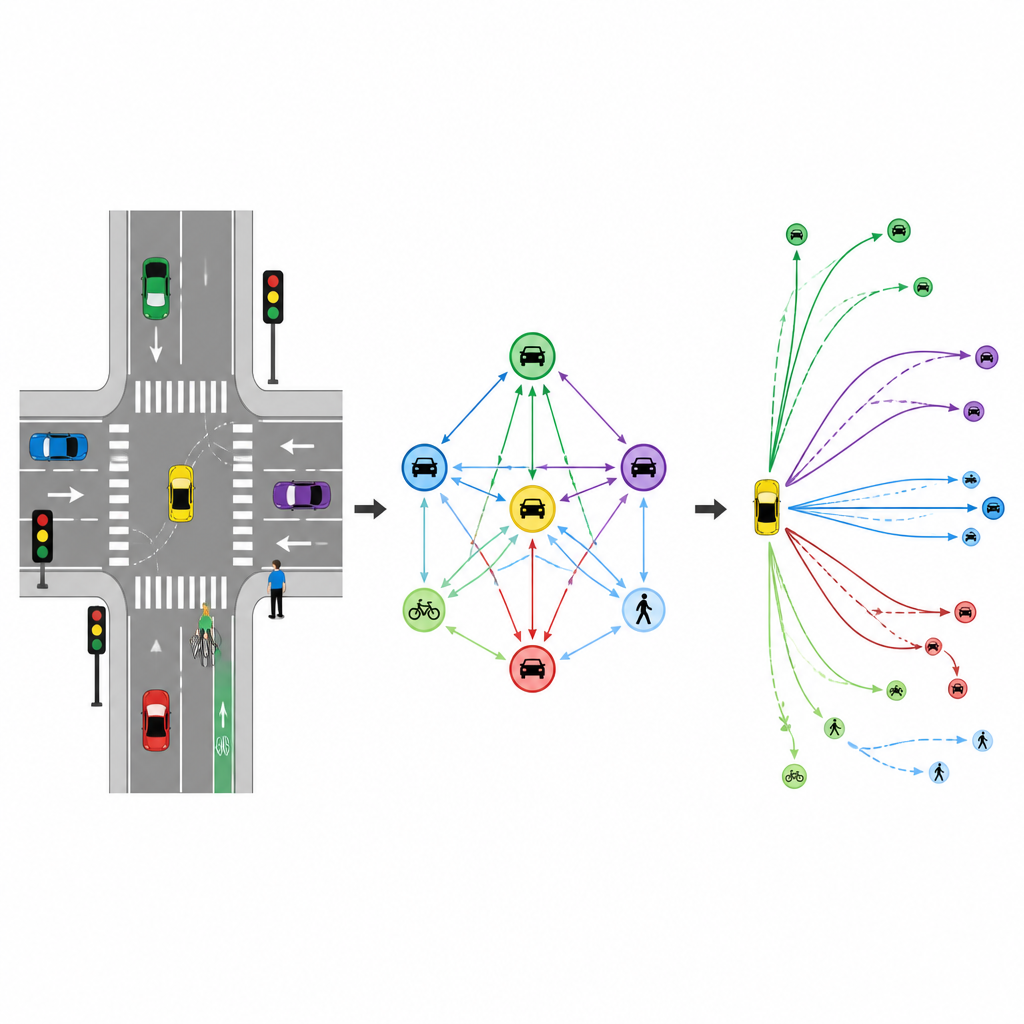
Что это значит для будущих самоуправляемых автомобилей
Для широкого читателя ключевой вывод состоит в том, что машины могут научиться «думать» о перекрёстках более похоже на людей: уделять внимание наиболее релевантным транспортным средствам, учитывать логику сигналов и допускать множество различных стилей движения. TITP демонстрирует, что сочетание правил дорожного движения с гибкими моделями поведения приводит к более точным прогнозам того, куда направятся автомобили, велосипедисты и пешеходы. Такие улучшения в предсказании траекторий — важный шаг к созданию автономных транспортных средств, способных безопасно и плавно передвигаться по сложным городским улицам.
Цитирование: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Ключевые слова: автономное вождение, прогнозирование траекторий, перекрёстки, дорожные сигналы, правила полос