Clear Sky Science · nl
Transportregels en uiteenlopende bewegingspatronen combineren voor trajectvoorspelling bij verkeerskruispunten
Waarom slimere kruispunten ertoe doen
Drukke kruispunten zijn enkele van de lastigste plekken voor zelfrijdende auto’s. Auto’s, bussen, fietsen en voetgangers bewegen in veel richtingen en reageren vaak binnen enkele ogenblikken op verkeerslichten en op elkaar. Deze studie introduceert een nieuwe manier voor computers om te anticiperen op hoe al deze weggebruikers door een kruispunt zullen bewegen, met als doel automatisering in stadsverkeer veiliger en vloeiender te maken.
Hoe voertuigen en mensen zich in de echte wereld bewegen
Bij een typisch kruispunt kijkt een bestuurder niet alleen naar de auto direct voor zich. Men houdt ook voertuigen in andere rijstroken in de gaten die het pad kunnen kruisen, terwijl verkeerslichten aangeven wanneer te starten, stoppen of afslaan. Fietsers en motorrijders passeren soms lichten op manieren die verschillen van auto’s, en voetgangers dwalen in langzaam tempo alle kanten op. Standaard voorspellingssystemen behandelen elke nabijgelegen weggebruiker vaak gelijk en negeren vaak de signaleringstiming, wat het moeilijk maakt de rijke mix van handelingen die zich daadwerkelijk ontvouwt te voorspellen.
Rijstroken en signalen omzetten in een aandachtskaart
De auteurs stellen een model voor genaamd TITP dat probeert aan te sluiten bij hoe menselijke bestuurders een kruispunt mentaal ordenen. Ze beginnen met een gerichte graaf die rijstrookregels encodeert: welke rijstroken in welke andere uitmonden en welke voertuigen het meest waarschijnlijk invloed op elkaar hebben. In dit schema besteedt een auto die bij rood licht wacht veel aandacht aan de eerste auto die bij groen vooruit zal rijden en minder aan verder weg gelegen voertuigen in niet-gerelateerde rijstroken. Deze "rijstrookregel-graaf" helpt het systeem te focussen op de meest relevante buren en asymmetrische invloed vast te leggen, zoals een snel naderende tegenligger die sterk van invloed is op een afslaand voertuig, ook als ze niet naast elkaar rijden. 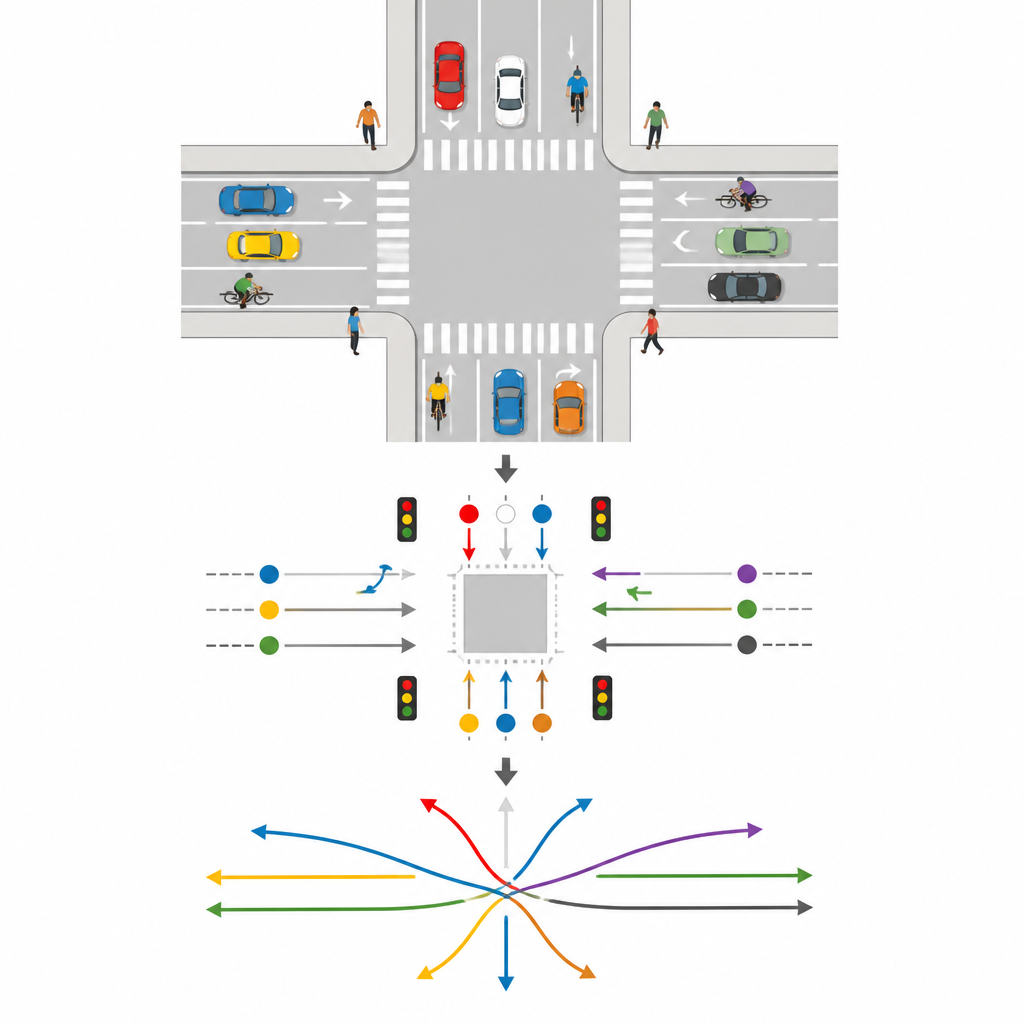
Verkeerslichten lezen als toekomstige acties
Vervolgens zet het model de standen van verkeerslichten om in waarschijnlijke bewegingsacties. In plaats van rood of groen als een simpele aan/uit-indicator te behandelen, koppelt TITP elke stand aan een reeks legale manoeuvres: rechtdoor, stoppen, linksaf of rechtsaf. Bijvoorbeeld, bij rood in de bestudeerde situatie mag een auto legaal stoppen of rechts afslaan, terwijl groen alle vier de acties toestaat. Het systeem vergelijkt deze sjabloonacties met de recente beweging van elk voertuig en gebruikt een leermodule om te kiezen welke actie het meest waarschijnlijk is. Op die manier worden de kleurwisselingen van de lichten vertaald naar een sequentie die aanwijzingen geeft over wat elke bestuurder binnenkort zal doen.
Verschillende bewegingsstijlen tegelijk vastleggen
Zelfs met rijstrookregels en signalen bewegen geen twee weggebruikers precies hetzelfde. Om met deze variatie om te gaan, vertrouwt TITP niet op één enkel patroon voor alle bewegingen. In plaats daarvan gebruikt het meerdere statistische vormen, bekend als t-verdelingen, elk afgestemd op een specifiek gedrag: stoppen, rechtdoor rijden, linksaf, rechtsaf of lopen als voetganger. Sommige van deze gedragingen, zoals auto’s beperkt door sturen, clusteren nauw rond een hoofdpad, terwijl andere, zoals zwervende voetgangers, zich over veel mogelijke richtingen verspreiden. Door de spreiding van elke verdeling aan te passen, kan het model zowel stabiel, voorspelbaar rijden als meer grillige bewegingen beschrijven.
Het model testen op echte stadsdata
De onderzoekers evalueerden TITP op twee grote verzamelingen van echt verkeer, waaronder een door drone opgenomen kruispuntdataset in China en een commercieel stedelijk rijdataset uit de Verenigde Staten. Ze vergeleken hun systeem met twee dozijn recente voorspellingsmethoden die tools gebruiken zoals recurrente netwerken, grafnetwerken en generatieve modellen. Over korte- en langetermijnvoorspellingen en voor vele typen weggebruikers produceerde TITP kleinere positiefouten dan concurrerende benaderingen. Visuele casestudies toonden aan dat het nieuwe model plotselinge acceleraties bij groen licht, subtiele afslaande bewegingen en uitwijkmanoeuvres rond voetgangers beter vastlegde, terwijl oudere modellen vaak langzamer of rechtere paden aannamen dan daadwerkelijk voorkwamen. 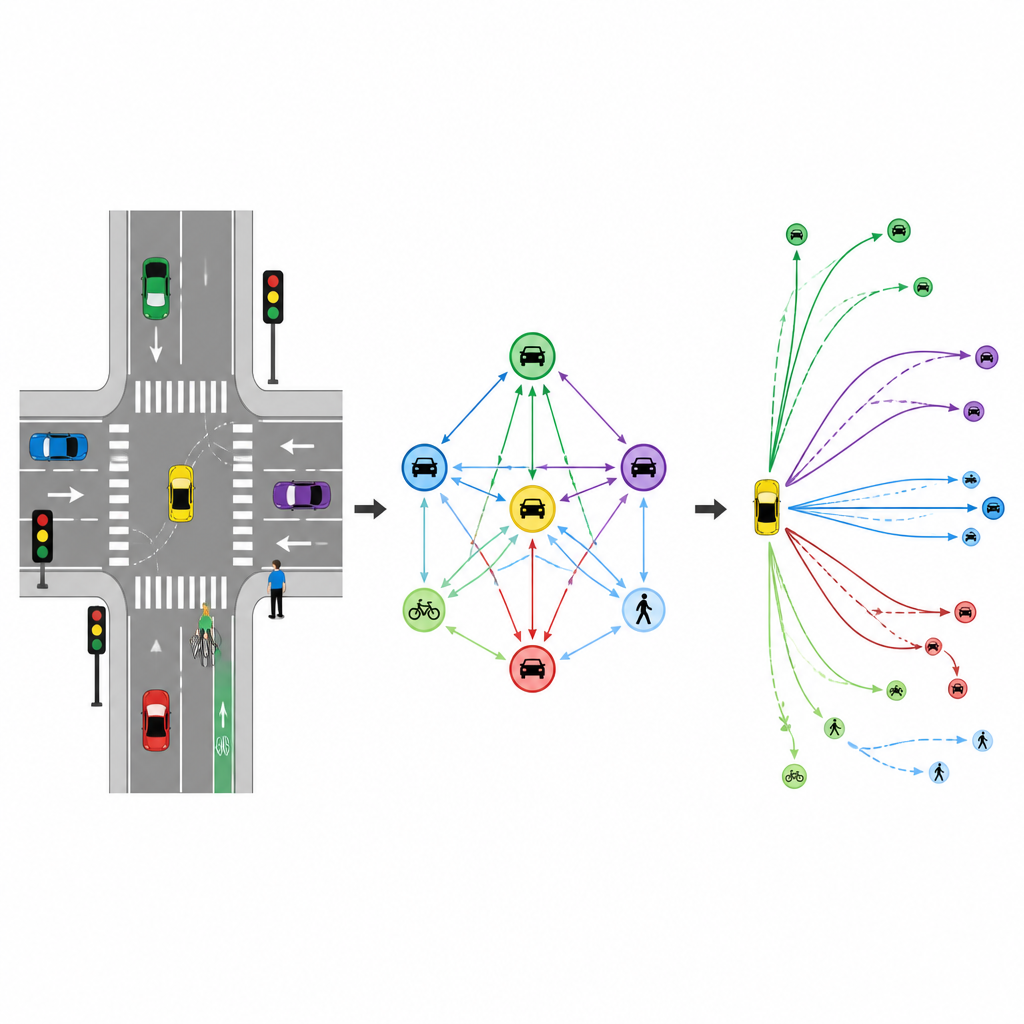
Wat dit betekent voor toekomstige zelfrijdende auto’s
Voor een algemeen publiek is de kernboodschap dat machines kunnen leren om over kruispunten na te denken zoals menselijke bestuurders dat doen: door aandacht te besteden aan de meest relevante voertuigen, logisch om te gaan met signalen en ruimte te laten voor verschillende bewegingsstijlen. TITP laat zien dat het mengen van verkeersregels met flexibele bewegingspatronen leidt tot nauwkeurigere voorspellingen over waar auto’s, fietsers en voetgangers daarnaartoe zullen gaan. Dergelijke verbeteringen in trajectvoorspelling zijn een belangrijke stap richting geautomatiseerde voertuigen die veilig en vloeiend door complexe stadsstraten kunnen bewegen.
Bronvermelding: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Trefwoorden: autonoom rijden, trajectvoorspelling, verkeerskruispunten, verkeerssignalen, rijstrookregels