Clear Sky Science · ar
دمج قواعد المرور وسلوكيات الحركة المتنوعة للتنبؤ بالمسارات عند التقاطعات المرورية
لماذا تُهمّ التقاطعات الأذكى
تعد التقاطعات المزدحمة من أصعب الأماكن التي تتعامل معها السيارات ذاتية القيادة. تتحرك السيارات والحافلات والدراجات والمشاة في اتجاهات متعددة، غالباً ما يستجيبون لإشارات المرور ولأفعال بعضهم البعض في أجزاء من الثانية. تقدم هذه الدراسة طريقة جديدة لأجهزة الحاسوب لتوقّع كيفية تحرك كل مستخدمي الطريق خلال التقاطع، بهدف جعل القيادة الآلية أكثر أماناً وسلاسة في حركة المرور الحضرية الواقعية.
كيف تتحرك المركبات والأشخاص في العالم الحقيقي
في تقاطع نموذجي، لا يراقب السائقون السيارة التي أمامهم فقط. إنهم أيضاً يراقبون المركبات في الحارات الأخرى التي قد تعبر طريقهم، بينما تخبرهم إشارات المرور متى يبدؤون أو يتوقفون أو ينعطفون. أحياناً يعبر راكبو الدراجات والسيارات النارية الإشارات بطرق تختلف عن السيارات، ويتجول المشاة بسرعات بطيئة في اتجاهات متعددة. تميل نظم التنبؤ التقليدية إلى معاملة كل مستخدمي الطريق القريبين بنفس الطريقة وغالباً تتجاهل توقيت الإشارات، مما يصعّب توقع المزيج الغني من الأفعال التي تحدث فعلياً.
تحويل حارات الطريق والإشارات إلى خريطة ترابط
يقترح المؤلفون نموذجاً يدعى TITP يحاول محاكاة الطريقة التي ينظّم بها السائقون التقاطع ذهنياً. يبدأون برسم بياني موجه يشفّر قواعد الحارات: أي الحارات تتصل بأي حارات أخرى، وأي المركبات من المرجح أن تؤثر على بعضها. في هذا الإطار، تركز سيارة واقفة عند إشارة حمراء اهتمامها بقوة على أول سيارة ستتحرك أمامها في نفس الحارة عندما يتحول الضوء إلى أخضر، وتولي اهتماماً أقل للمركبات البعيدة في حارات غير ذات صلة. تساعد هذه «خريطة قواعد الحارات» النظام على التركيز على الجيران الأكثر صلة واحتواء التأثير غير المتماثل، مثل سيارة سريعة قادمة تؤثر بقوة في مركبة منعطفة، حتى لو لم يكونا جنباً إلى جنب. 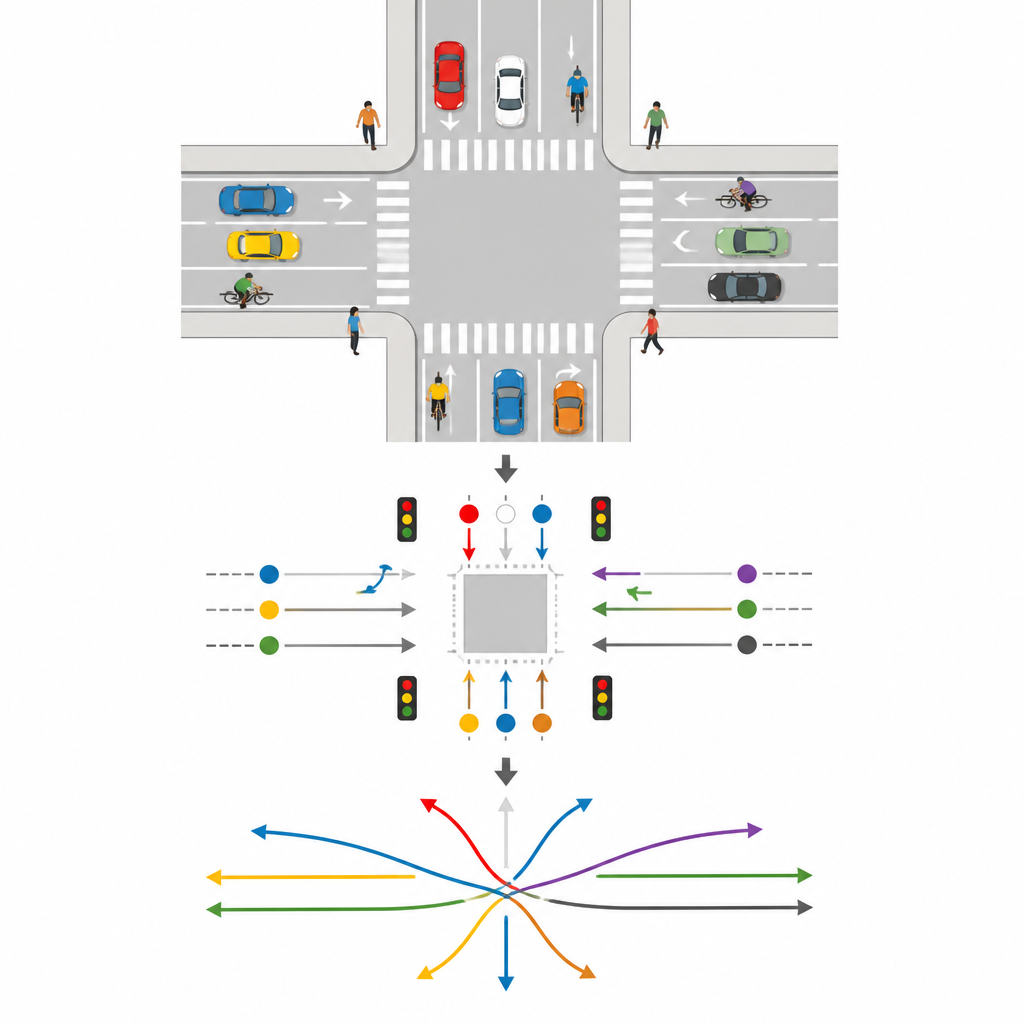
قراءة إشارات المرور كإجراءات مستقبلية
بعد ذلك، يحول النموذج حالات إشارات المرور إلى إجراءات محتملة للحركة. بدلاً من التعامل مع الأحمر أو الأخضر كإشارة تشغيل/إيقاف بسيطة، يقوم TITP بربط كل حالة بمجموعة من الحركات القانونية: التوجه مباشرة، التوقف، الانعطاف يساراً، أو الانعطاف يميناً. على سبيل المثال، في حالة الضوء الأحمر في الإعداد المدروس، قد يحق للسيارة التوقف أو القيام بانعطاف يمين، بينما يسمح الضوء الأخضر بجميع الإجراءات الأربعة. يقارن النظام هذه الأفعال القالبية مع حركة كل مركبة في الفترة الأخيرة ويستخدم وحدة تعلم لاختيار الإجراء الأكثر احتمالاً. بهذه الطريقة تُترجم ألوان الإشارات المتغيرة إلى تسلسل يلمّح إلى ما سيفعله كل سائق قريباً.
التقاط أنماط حركة متنوعة في وقت واحد
حتى مع قواعد الحارات والإشارات، لا تتحرك أي مركبتين أو مستخدمي طريق بنفس الطريقة بالضبط. للتعامل مع هذا التنوع، لا يعتمد TITP على نمط واحد للحركة لكل الحالات. بدلاً من ذلك، يستخدم عدة أشكال إحصائية، تُعرف بتوزيعات t، كل واحدة مضبوطة لسلوك معين: التوقف، السير مباشرة، الانعطاف يساراً، الانعطاف يميناً، أو المشي كمشاة. بعض هذه السلوكيات، مثل السيارات المقيدة بالقيادة، تتجمع بإحكام حول مسار رئيسي، بينما تمتد سلوكيات أخرى، كالمشاة المتجولين، على عدة اتجاهات محتملة. من خلال ضبط تشتت كل توزيع، يمكن للنموذج وصف كل من القيادة المستقرة والمتوقعة والحركات الأكثر عشوائية.
اختبار النموذج على بيانات مدن حقيقية
قيّم الباحثون TITP على مجموعتين كبيرتين من بيانات المرور الحقيقية، بما في ذلك مجموعة بيانات لتقاطع مسجّل بطائرة من دون طيار في الصين ومجموعة بيانات قيادة حضرية تجارية من الولايات المتحدة. قارنوا نظامهم مع عشرات طرق التنبؤ الحديثة التي تستخدم أدوات مثل الشبكات العودية، الشبكات البيانية، والنماذج التوليدية. عبر التنبؤات قصيرة وطويلة الأمد ولكثير من أنواع مستخدمي الطريق، قدّم TITP أخطاء موقع أصغر من الأساليب المنافسة. أظهرت دراسات حالة مرئية أن النموذج الجديد التقط بشكل أفضل التسارعات المفاجئة عندما تحول الضوء إلى أخضر، والحركات الانعطافية الدقيقة، والمناورات المراوغة حول المشاة، بينما كانت النماذج القديمة غالباً تفترض سرعات أبطأ أو مسارات أكثر استقامة مما حدث فعلاً. 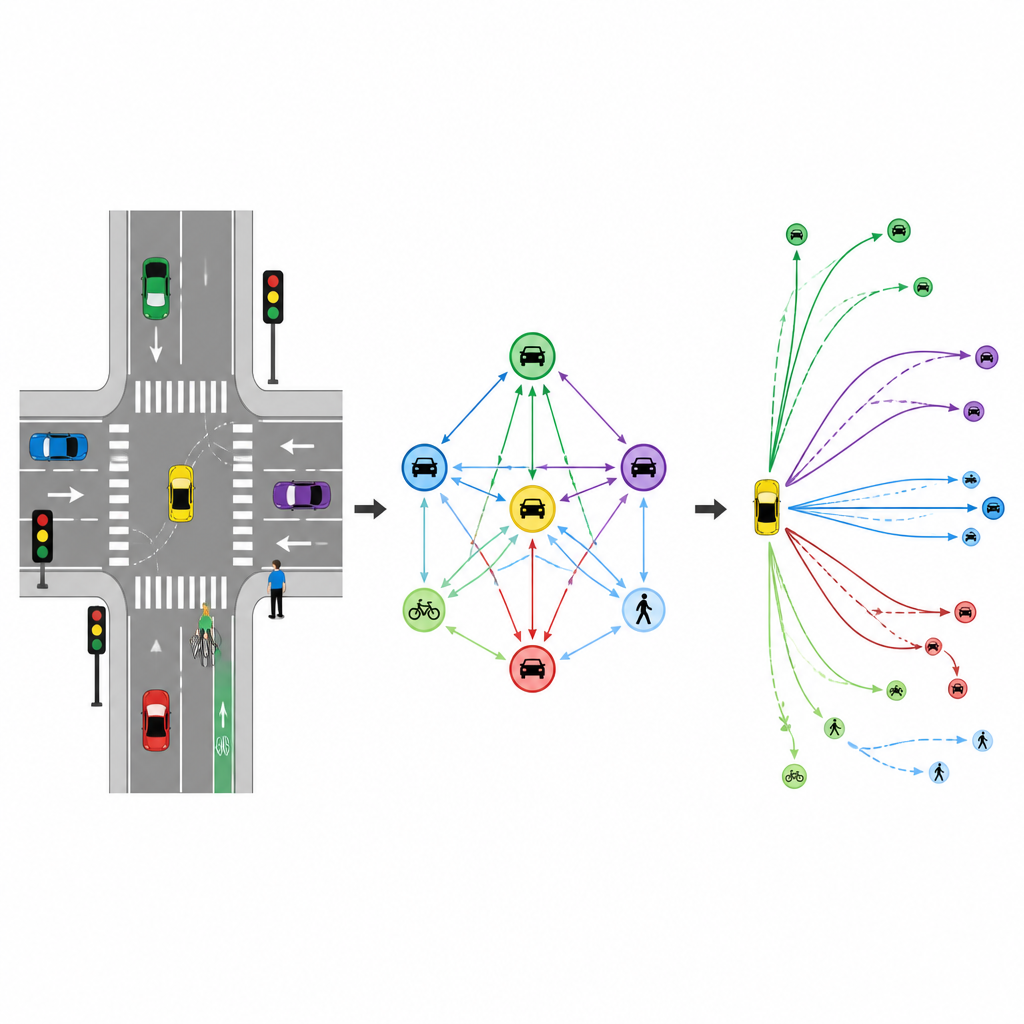
ماذا يعني هذا لسيارات المستقبل ذاتية القيادة
للقارئ العام، الرسالة الأساسية هي أن الآلات يمكنها أن تتعلم «التفكير» في التقاطعات بطريقة أقرب إلى السائقين البشريين، عبر إيلاء الاهتمام للمركبات الأكثر صلة، واتباع منطق الإشارات، والسماح بالعديد من أنماط الحركة المختلفة. يبيّن TITP أن مزيج قواعد المرور مع أنماط حركة مرنة يؤدي إلى توقعات أكثر دقة لمكان تحرك السيارات والدراجات والمشاة لاحقاً. تمثل مثل هذه التحسينات في التنبؤ بالمسارات خطوة مهمة نحو مركبات آلية قادرة على التحرك بأمان وسلاسة عبر شوارع المدن المعقدة.
الاستشهاد: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
الكلمات المفتاحية: القيادة الذاتية, التنبؤ بالمسارات, التقاطعات المرورية, إشارات المرور, قواعد الحارات