Clear Sky Science · fr
Fusionner les règles de circulation et les comportements de mouvement divers pour la prédiction de trajectoires aux intersections
Pourquoi des intersections plus intelligentes comptent
Les carrefours fréquentés sont parmi les endroits les plus délicats à gérer pour les véhicules autonomes. Voitures, bus, vélos et piétons se déplacent dans de nombreuses directions, réagissant souvent en une fraction de seconde aux feux et les uns aux autres. Cette étude présente une nouvelle manière pour les ordinateurs d’anticiper les mouvements de tous ces usagers à une intersection, dans le but de rendre la conduite automatisée plus sûre et plus fluide dans le trafic urbain réel.
Comment véhicules et piétons se déplacent dans le monde réel
À une intersection typique, les conducteurs ne regardent pas seulement le véhicule qui précède immédiatement. Ils surveillent aussi les véhicules dans d’autres voies susceptibles de couper leur trajectoire, tandis que les feux leur indiquent quand démarrer, s’arrêter ou tourner. Les cyclistes et motards franchissent parfois les feux de façon différente des voitures, et les piétons se déplacent lentement dans de multiples directions. Les systèmes de prédiction classiques ont tendance à traiter tous les usagers voisins de la même manière et ignorent souvent la chronologie des signaux, ce qui rend difficile la prévision de la riche variété d’actions qui se déploie réellement.
Transformer voies et signaux en carte d’attention
Les auteurs proposent un modèle nommé TITP qui cherche à reproduire la façon dont les conducteurs organisent mentalement une intersection. Ils commencent par un graphe orienté qui encode les règles de voie : quelles voies débouchent sur quelles autres, et quels véhicules sont les plus susceptibles de s’influencer mutuellement. Dans ce schéma, une voiture arrêtée à un feu rouge porte une forte attention au premier véhicule qui avancera dans sa voie lorsque le feu passera au vert, et moins d’attention aux véhicules éloignés dans des voies non liées. Ce « graphe des règles de voie » aide le système à se concentrer sur les voisins les plus pertinents et à capturer une influence asymétrique, par exemple une voiture rapide en approche qui affecte fortement un véhicule en train de tourner, même s’ils ne sont pas côte à côte. 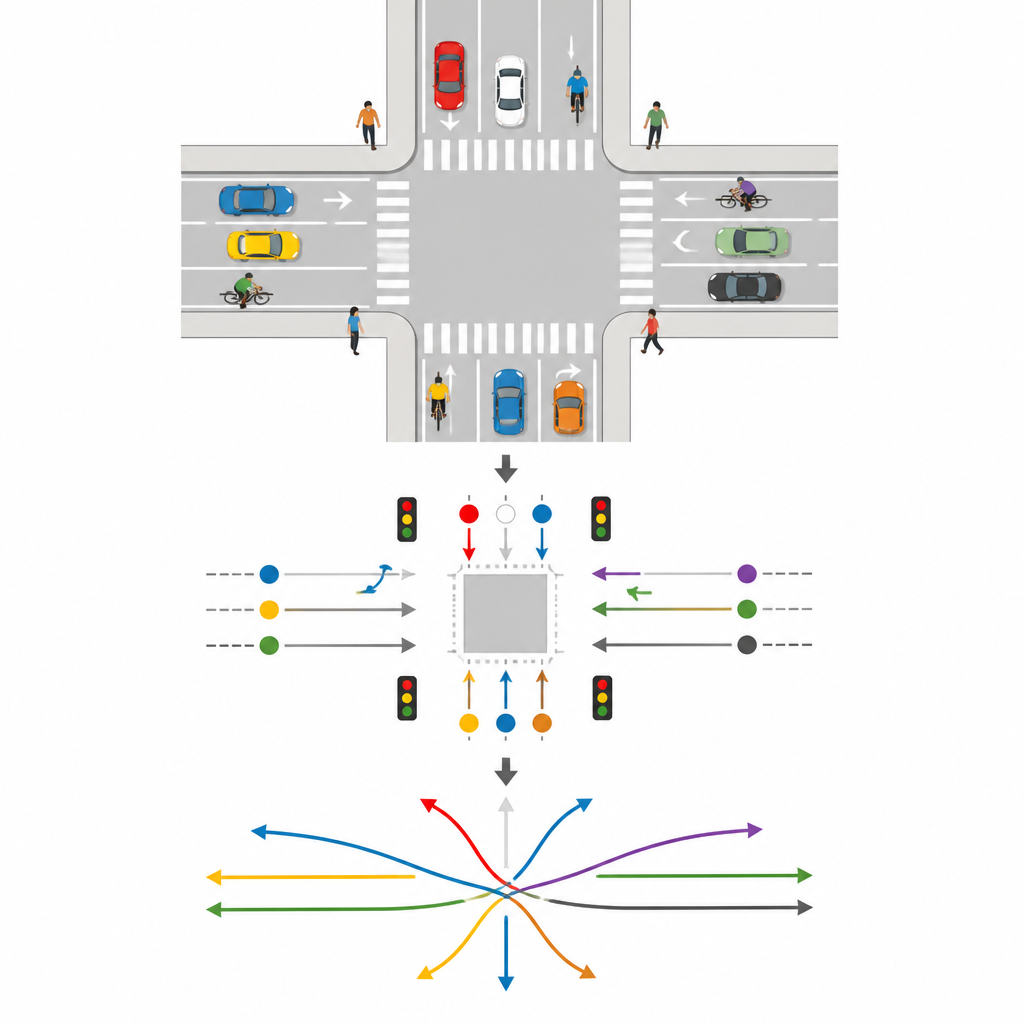
Interpréter les feux comme des actions futures
Ensuite, le modèle convertit les états des feux en actions de mouvement probables. Au lieu de traiter un feu rouge ou vert comme un simple signal binaire, TITP associe chaque état à un ensemble de mouvements permis : aller tout droit, s’arrêter, tourner à gauche ou tourner à droite. Par exemple, dans le contexte étudié, un feu rouge permet légalement à une voiture de s’arrêter ou de tourner à droite, tandis qu’un feu vert autorise les quatre actions. Le système compare ces actions types au mouvement récent de chaque véhicule et utilise un module d’apprentissage pour choisir quelle action est la plus probable. Ainsi, les changements de couleur des feux se transforment en une séquence qui suggère ce que chaque conducteur fera bientôt.
Capturer plusieurs styles de mouvement simultanément
Même avec les règles de voie et les signaux, aucun usager ne se déplace exactement de la même façon. Pour gérer cette variété, TITP n’utilise pas un seul modèle de mouvement pour tous. Il emploie plusieurs formes statistiques, appelées distributions t, chacune ajustée à un comportement spécifique : arrêt, aller tout droit, tourner à gauche, tourner à droite ou marcher en tant que piéton. Certains de ces comportements, comme les voitures contraintes par la direction, se concentrent fortement autour d’un trajet principal, tandis que d’autres, comme les piétons errants, se dispersent sur de nombreuses directions possibles. En ajustant l’étalement de chaque distribution, le modèle peut décrire à la fois une conduite régulière et prévisible et des mouvements plus erratiques.
Tester le modèle sur des données urbaines réelles
Les chercheurs ont évalué TITP sur deux grandes collections de trafic réel, dont un jeu de données d’intersections enregistré par drone en Chine et un jeu de données commercial de conduite urbaine aux États-Unis. Ils ont comparé leur système à deux douzaines de méthodes de prédiction récentes utilisant des outils tels que réseaux récurrents, graphes et modèles génératifs. Sur les prévisions à court et long terme et pour de nombreux types d’usagers, TITP a produit des erreurs de position plus faibles que les approches concurrentes. Des études de cas visuelles ont montré que le nouveau modèle captait mieux les accélérations soudaines lors du passage au vert, les mouvements de virage subtils et les manœuvres d’évitement autour des piétons, tandis que les modèles plus anciens supposaient souvent des vitesses plus faibles ou des trajectoires plus rectilignes que celles qui se produisaient réellement. 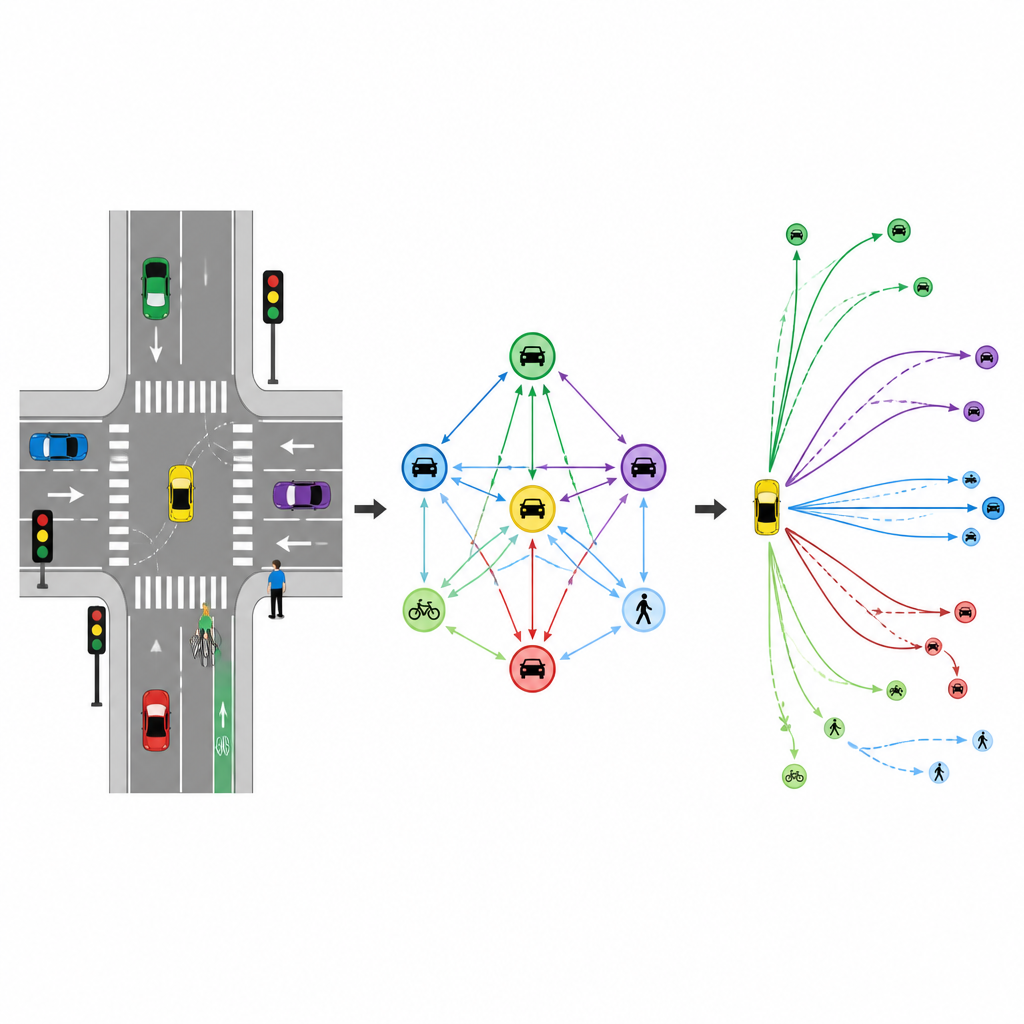
Ce que cela signifie pour les voitures autonomes de demain
Pour le lecteur non spécialiste, le message principal est que les machines peuvent apprendre à « penser » les intersections de manière plus proche des conducteurs humains, en prêtant attention aux véhicules les plus pertinents, en respectant la logique des signaux et en autorisant de nombreux styles de mouvement distincts. TITP montre que mêler règles de circulation et modèles de mouvement flexibles conduit à des estimations plus précises des trajectoires des voitures, cyclistes et piétons. Ces améliorations de la prédiction de trajectoire sont une étape importante vers des véhicules automatisés capables de circuler de façon sûre et fluide dans des rues urbaines complexes.
Citation: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Mots-clés: conduite autonome, prédiction de trajectoire, intersections routières, feux de circulation, règles de voie