Clear Sky Science · en
Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections
Why smarter intersections matter
Busy crossroads are some of the trickiest places for self-driving cars to handle. Cars, buses, bikes, and people on foot move in many directions, often reacting to traffic lights and to one another in split seconds. This study introduces a new way for computers to anticipate how all these road users will move through an intersection, with the aim of making automated driving safer and smoother in real-world city traffic.
How vehicles and people move in the real world
At a typical intersection, drivers do not just watch the car right in front of them. They also monitor vehicles in other lanes that might cut across their path, while traffic lights tell them when to start, stop, or turn. Cyclists and motorcyclists sometimes roll through lights in ways that differ from cars, and pedestrians wander at slow speeds in many directions. Standard prediction systems tend to treat every nearby road user the same and often ignore the signal timing, which makes it hard to forecast the rich mix of actions that actually unfolds.
Turning lanes and signals into a map of attention
The authors propose a model called TITP that tries to match how human drivers mentally organize an intersection. They begin with a directed graph that encodes lane rules: which lanes feed into which others, and which vehicles are most likely to affect one another. In this scheme, a car waiting at a red light pays strong attention to the first car that will move ahead in its lane when the light turns green, and less attention to distant vehicles in unrelated lanes. This "lane rule graph" helps the system focus on the most relevant neighbors and capture asymmetric influence, such as a fast oncoming car that strongly affects a turning vehicle, even if they are not side by side. 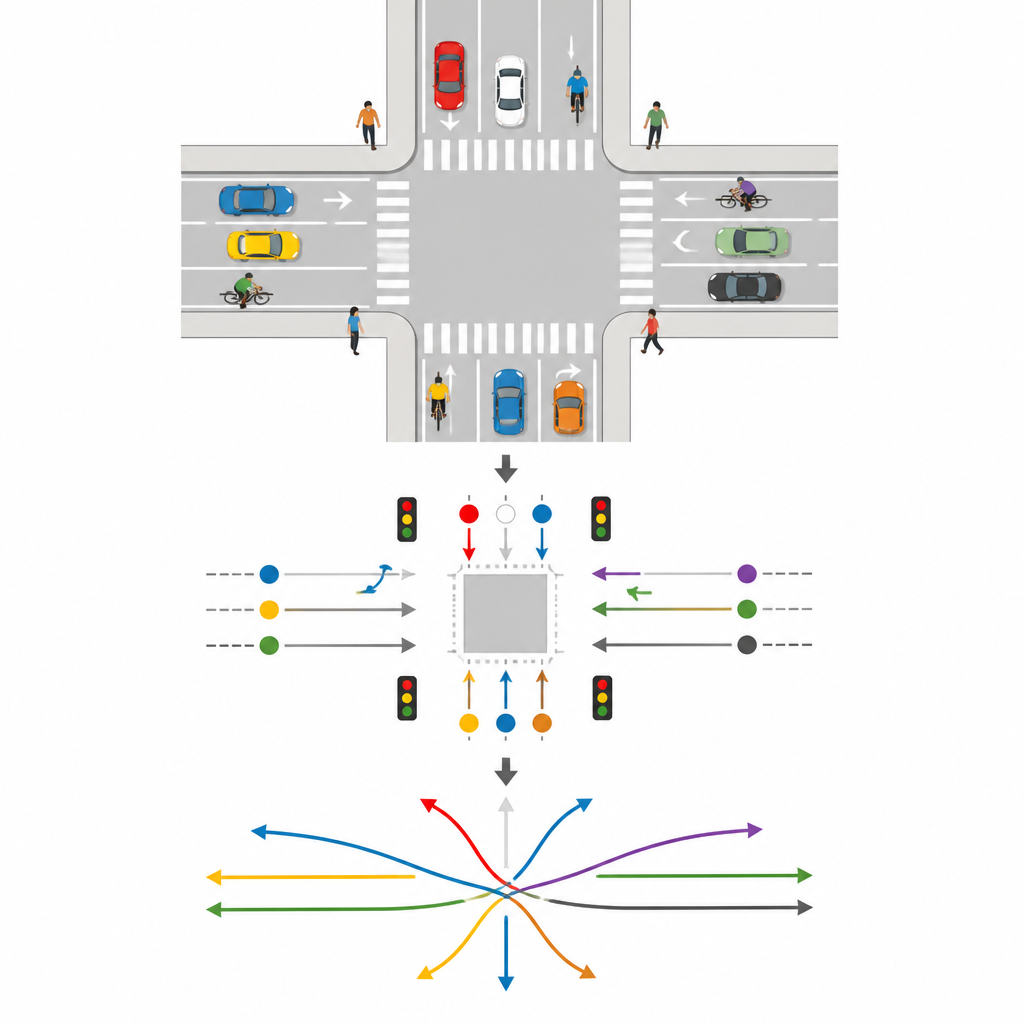
Reading traffic lights as future actions
Next, the model converts traffic light states into likely motion actions. Instead of treating a red or green light as a simple on/off signal, TITP maps each state to a set of legal moves: going straight, stopping, turning left, or turning right. For example, under a red light in the studied setting, a car may legally stop or make a right turn, while a green light allows all four actions. The system compares these template actions with the recent motion of each vehicle and uses a learning module to choose which action is most probable. In this way, the changing colors of the lights are translated into a sequence that hints at what each driver will soon do.
Capturing many styles of motion at once
Even with lane rules and signals, no two road users move exactly alike. To handle this variety, TITP does not rely on a single pattern for all motion. Instead, it uses several statistical shapes, known as t-distributions, each tuned to a specific behavior: stopping, going straight, turning left, turning right, or walking as a pedestrian. Some of these behaviors, such as cars constrained by steering, cluster tightly around a main path, while others, like wandering pedestrians, spread out over many possible directions. By adjusting the spread of each distribution, the model can describe both steady, predictable driving and more erratic movement.
Testing the model on real city data
The researchers evaluated TITP on two large collections of real traffic, including a drone-recorded intersection dataset in China and a commercial urban driving dataset from the United States. They compared their system with two dozen recent prediction methods that use tools such as recurrent networks, graph networks, and generative models. Across short- and long-term forecasts and for many types of road users, TITP produced smaller position errors than rival approaches. Visual case studies showed that the new model better captured sudden accelerations when a light turned green, subtle turning motions, and evasive maneuvers around pedestrians, while older models often assumed slower speeds or straighter paths than actually occurred. 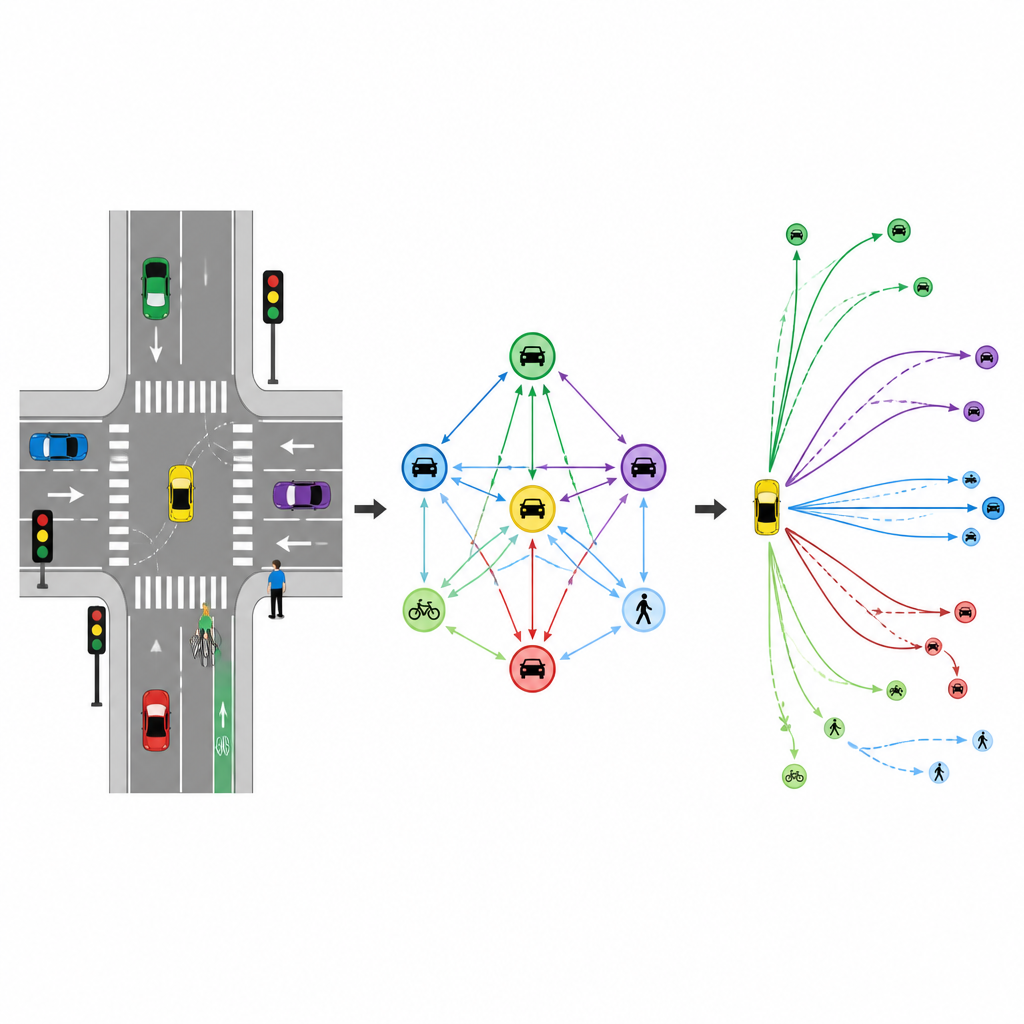
What this means for future self-driving cars
For a general reader, the key message is that machines can learn to "think" about intersections more like human drivers do, by paying attention to the most relevant vehicles, obeying signal logic, and allowing for many distinct motion styles. TITP shows that blending traffic rules with flexible motion patterns leads to more accurate guesses about where cars, cyclists, and pedestrians will go next. Such improvements in trajectory prediction are an important step toward automated vehicles that can move safely and smoothly through complex city streets.
Citation: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Keywords: autonomous driving, trajectory prediction, traffic intersections, traffic signals, lane rules