Clear Sky Science · it
Fondere regole di circolazione e comportamenti di movimento diversi per la predizione delle traiettorie agli incroci
Perché gli incroci più intelligenti sono importanti
Gli incroci affollati sono alcuni dei punti più complessi da gestire per le auto a guida autonoma. Auto, autobus, biciclette e pedoni si muovono in molte direzioni, reagendo spesso ai semafori e l’uno all’altro in frazioni di secondo. Questo studio introduce un nuovo modo per i computer di anticipare come tutti questi utenti della strada si muoveranno attraverso un incrocio, con l’obiettivo di rendere la guida automatizzata più sicura e fluida nel traffico urbano reale.
Come si muovono veicoli e persone nel mondo reale
In un incrocio tipico, gli automobilisti non guardano solo l’auto che li precede immediatamente. Tengono d’occhio anche i veicoli nelle altre corsie che potrebbero tagliare il loro percorso, mentre i semafori indicano quando partire, fermarsi o svoltare. Ciclisti e motociclisti a volte passano i semafori in modi diversi rispetto alle auto, e i pedoni si muovono lentamente in molte direzioni. I sistemi di predizione standard tendono a trattare ogni utente della strada nelle vicinanze allo stesso modo e spesso ignorano la temporizzazione dei segnali, il che rende difficile prevedere la ricca mescolanza di azioni che si verifica realmente.
Trasformare corsie e segnali in una mappa di attenzione
Gli autori propongono un modello chiamato TITP che cerca di avvicinarsi a come i guidatori umani organizzano mentalmente un incrocio. Partono da un grafo diretto che codifica le regole delle corsie: quali corsie confluiscono in quali altre e quali veicoli sono più propensi a influenzarsi a vicenda. In questo schema, un’auto ferma al rosso presta forte attenzione alla prima vettura che si muoverà davanti a lei nella stessa corsia quando il semaforo diventa verde, e meno attenzione a veicoli distanti in corsie non correlate. Questo “grafo delle regole di corsia” aiuta il sistema a concentrarsi sui vicini più rilevanti e a catturare influenze asimmetriche, come un’auto veloce in arrivo che influenza fortemente un veicolo in fase di svolta, anche se non sono affiancati. 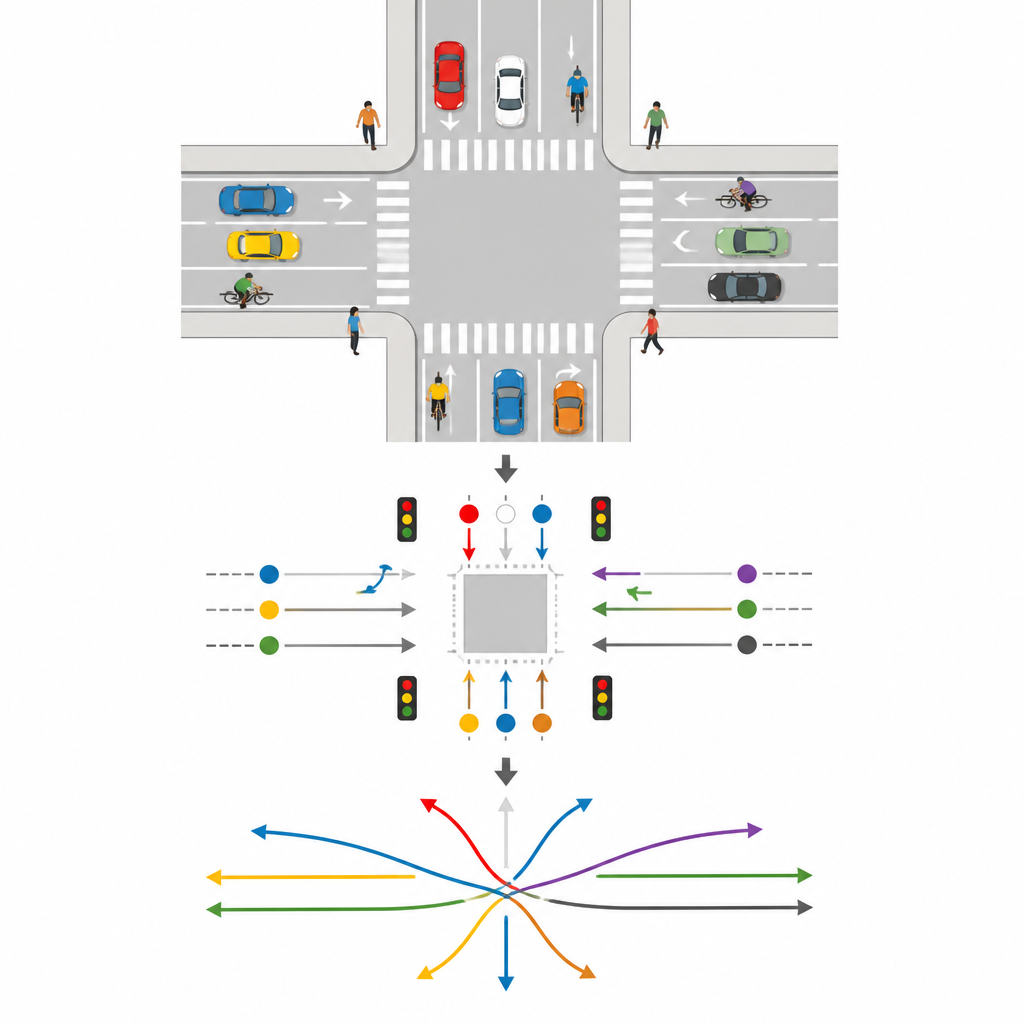
Interpretare i semafori come azioni future
Successivamente, il modello converte gli stati dei semafori in probabili azioni di movimento. Invece di trattare un rosso o un verde come un semplice segnale on/off, TITP mappa ciascuno stato a un insieme di mosse legali: andare dritto, fermarsi, svoltare a sinistra o svoltare a destra. Per esempio, sotto un semaforo rosso nella configurazione studiata, un’auto può legalmente fermarsi o svoltare a destra, mentre un verde permette tutte e quattro le azioni. Il sistema confronta queste azioni modello con il movimento recente di ogni veicolo e utilizza un modulo di apprendimento per scegliere quale azione è più probabile. In questo modo i cambiamenti di colore dei semafori vengono tradotti in una sequenza che suggerisce ciò che ogni guidatore farà a breve.
Catturare molti stili di movimento contemporaneamente
Anche con regole di corsia e segnali, nessun utente della strada si muove esattamente come un altro. Per gestire questa varietà, TITP non si affida a un unico schema per tutti i movimenti. Usa invece diverse forme statistiche, note come distribuzioni t, ciascuna sintonizzata su un comportamento specifico: fermarsi, andare dritto, svoltare a sinistra, svoltare a destra o camminare come pedone. Alcuni di questi comportamenti, come le auto vincolate dalla sterzata, si raggruppano strettamente attorno a un percorso principale, mentre altri, come i pedoni vagabondi, si distribuiscono su molte direzioni possibili. Regolando l’ampiezza di ciascuna distribuzione, il modello può descrivere sia una guida stabile e prevedibile sia movimenti più erratici.
Testare il modello su dati reali di città
I ricercatori hanno valutato TITP su due grandi raccolte di traffico reale, inclusi dati di un incrocio registrato da droni in Cina e un dataset commerciale di guida urbana dagli Stati Uniti. Hanno confrontato il loro sistema con una ventina di recenti metodi di predizione che utilizzano strumenti come reti ricorrenti, grafi e modelli generativi. Sia per previsioni a breve che a lungo termine e per molti tipi di utenti della strada, TITP ha prodotto errori di posizione minori rispetto agli approcci concorrenti. Studi di casi visivi hanno mostrato che il nuovo modello catturava meglio le accelerazioni improvvise quando il semaforo diventava verde, i sottili movimenti di svolta e le manovre evasive intorno ai pedoni, mentre i modelli più vecchi spesso assumevano velocità più lente o traiettorie più dritte di quelle realmente avvenute. 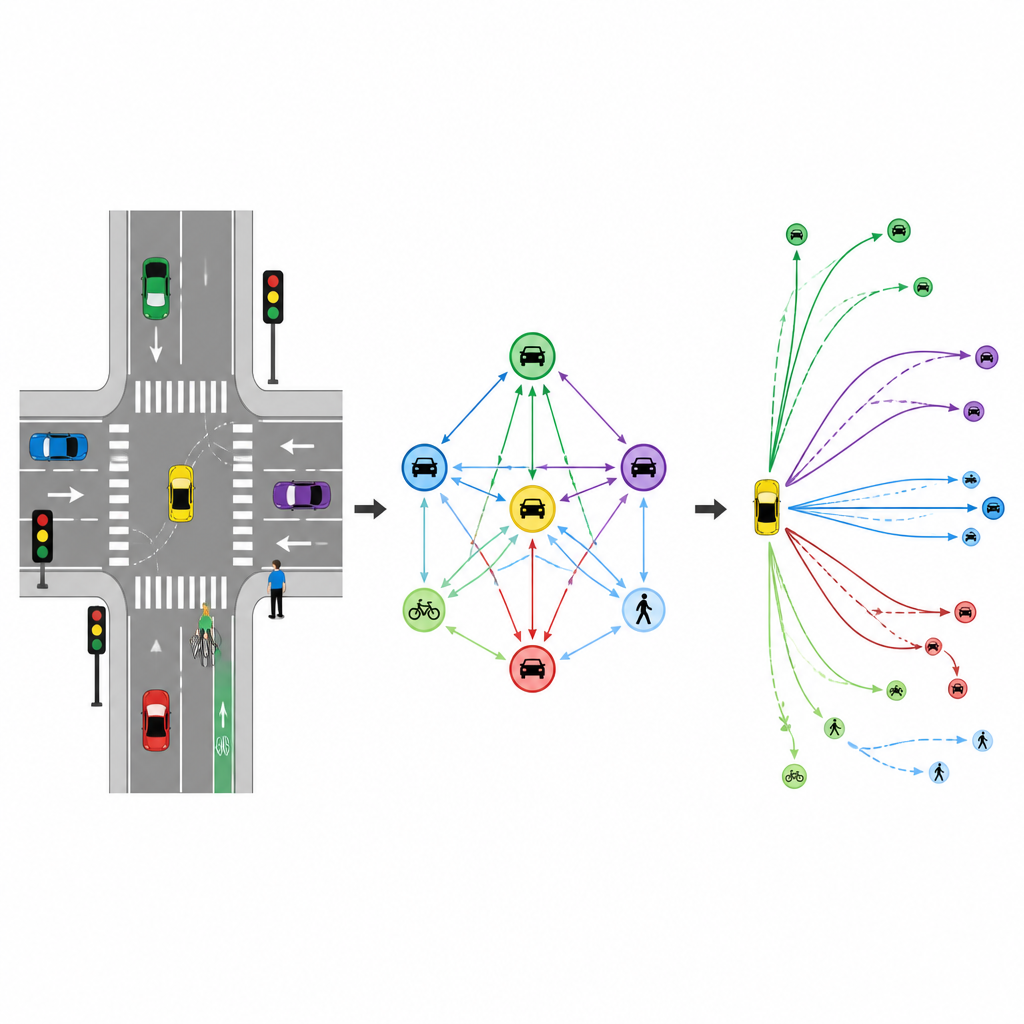
Cosa significa questo per le future auto a guida autonoma
Per il lettore generale, il messaggio chiave è che le macchine possono imparare a “pensare” agli incroci in modo più simile ai guidatori umani, prestando attenzione ai veicoli più rilevanti, rispettando la logica dei segnali e permettendo molti stili di movimento distinti. TITP dimostra che fondere le regole del traffico con schemi di movimento flessibili porta a previsioni più accurate su dove andranno auto, ciclisti e pedoni. Tali miglioramenti nella predizione delle traiettorie sono un passo importante verso veicoli automatizzati in grado di muoversi in sicurezza e con fluidità nelle complesse strade cittadine.
Citazione: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Parole chiave: guida autonoma, predizione delle traiettorie, incroci stradali, segnali del traffico, regole di corsia