Clear Sky Science · es
Fusionando reglas de tráfico y comportamientos de movimiento diversos para la predicción de trayectorias en intersecciones
Por qué importan intersecciones más inteligentes
Los cruces concurridos son algunos de los lugares más complejos para que los coches autónomos los gestionen. Coches, autobuses, bicicletas y peatones se mueven en muchas direcciones, a menudo reaccionando a los semáforos y entre sí en fracciones de segundo. Este estudio presenta una nueva forma para que los ordenadores anticipen cómo se moverán todos estos usuarios de la vía por una intersección, con el objetivo de hacer la conducción automatizada más segura y fluida en el tráfico urbano real.
Cómo se mueven vehículos y personas en el mundo real
En una intersección típica, los conductores no solo observan al vehículo que tienen justo delante. También vigilan vehículos en otros carriles que podrían cruzar su trayectoria, mientras que los semáforos les indican cuándo arrancar, detenerse o girar. Los ciclistas y motociclistas a veces pasan los semáforos de manera diferente a los coches, y los peatones se desplazan a baja velocidad en muchas direcciones. Los sistemas de predicción estándar tienden a tratar por igual a todos los usuarios cercanos y a menudo ignoran la sincronización de las señales, lo que dificulta pronosticar la rica mezcla de acciones que realmente se desarrolla.
Convertir carriles y señales en un mapa de atención
Los autores proponen un modelo llamado TITP que intenta reproducir cómo los conductores humanos organizan mentalmente una intersección. Comienzan con un grafo dirigido que codifica las reglas de carril: qué carriles confluyen en cuáles y qué vehículos son más propensos a influirse mutuamente. En este esquema, un coche detenido en un semáforo en rojo presta mucha atención al primer vehículo que avanzará en su carril cuando el semáforo se ponga en verde, y menos atención a vehículos lejanos en carriles no relacionados. Este “grafo de reglas de carril” ayuda al sistema a centrarse en los vecinos más relevantes y a capturar influencias asimétricas, como un coche rápido que viene de frente y afecta mucho a un vehículo que gira, aunque no estén uno al lado del otro. 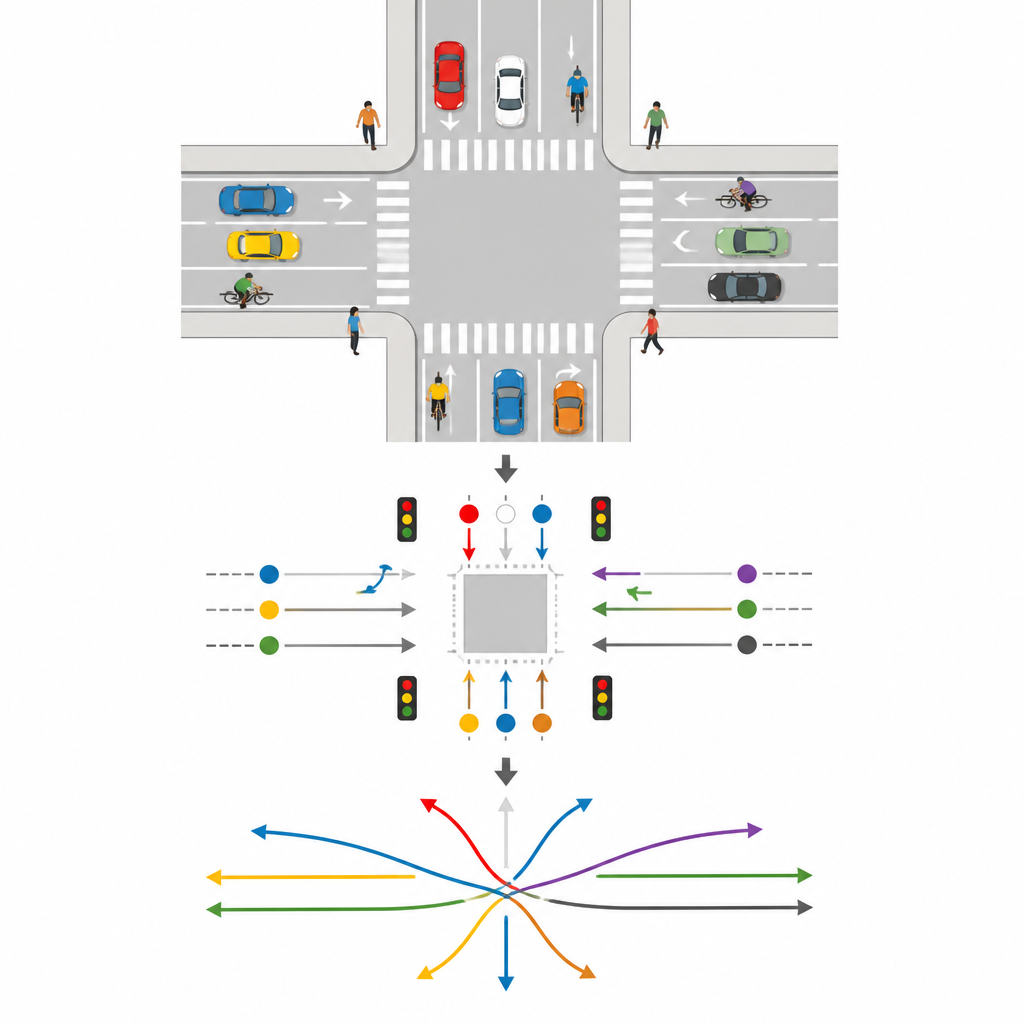
Interpretar los semáforos como acciones futuras
A continuación, el modelo convierte los estados del semáforo en acciones de movimiento probables. En lugar de tratar un rojo o verde como una señal simple de encendido/apagado, TITP asigna a cada estado un conjunto de maniobras legales: seguir recto, detenerse, girar a la izquierda o girar a la derecha. Por ejemplo, bajo un semáforo en rojo en el escenario estudiado, un coche puede legalmente detenerse o realizar un giro a la derecha, mientras que un semáforo en verde permite las cuatro acciones. El sistema compara estas acciones tipo con el movimiento reciente de cada vehículo y utiliza un módulo de aprendizaje para elegir qué acción es la más probable. De este modo, los cambios de color de los semáforos se traducen en una secuencia que sugiere lo que cada conductor hará pronto.
Capturar muchos estilos de movimiento a la vez
Incluso con reglas de carril y señales, no hay dos usuarios de la vía que se muevan exactamente igual. Para manejar esta variedad, TITP no depende de un único patrón para todo el movimiento. En su lugar, utiliza varias formas estadísticas, conocidas como distribuciones t, cada una afinada para un comportamiento específico: detenerse, seguir recto, girar a la izquierda, girar a la derecha o caminar como peatón. Algunos de estos comportamientos, como coches limitados por la dirección, se agrupan de forma estrecha alrededor de una trayectoria principal, mientras que otros, como peatones que se desplazan sin rumbo fijo, se extienden por muchas direcciones posibles. Al ajustar la dispersión de cada distribución, el modelo puede describir tanto una conducción estable y predecible como movimientos más erráticos.
Probar el modelo con datos urbanos reales
Los investigadores evaluaron TITP en dos grandes colecciones de tráfico real, que incluyen un conjunto de intersecciones grabadas por dron en China y un conjunto comercial de conducción urbana de Estados Unidos. Compararon su sistema con dos docenas de métodos recientes de predicción que usan herramientas como redes recurrentes, grafos y modelos generativos. En previsiones a corto y largo plazo y para muchos tipos de usuarios de la vía, TITP produjo errores de posición menores que los de las aproximaciones rivales. Estudios de casos visuales mostraron que el nuevo modelo captó mejor aceleraciones repentinas cuando el semáforo se ponía en verde, sutiles movimientos de giro y maniobras evasivas alrededor de peatones, mientras que modelos más antiguos a menudo asumían velocidades más bajas o trayectorias más rectas de las que realmente ocurrieron. 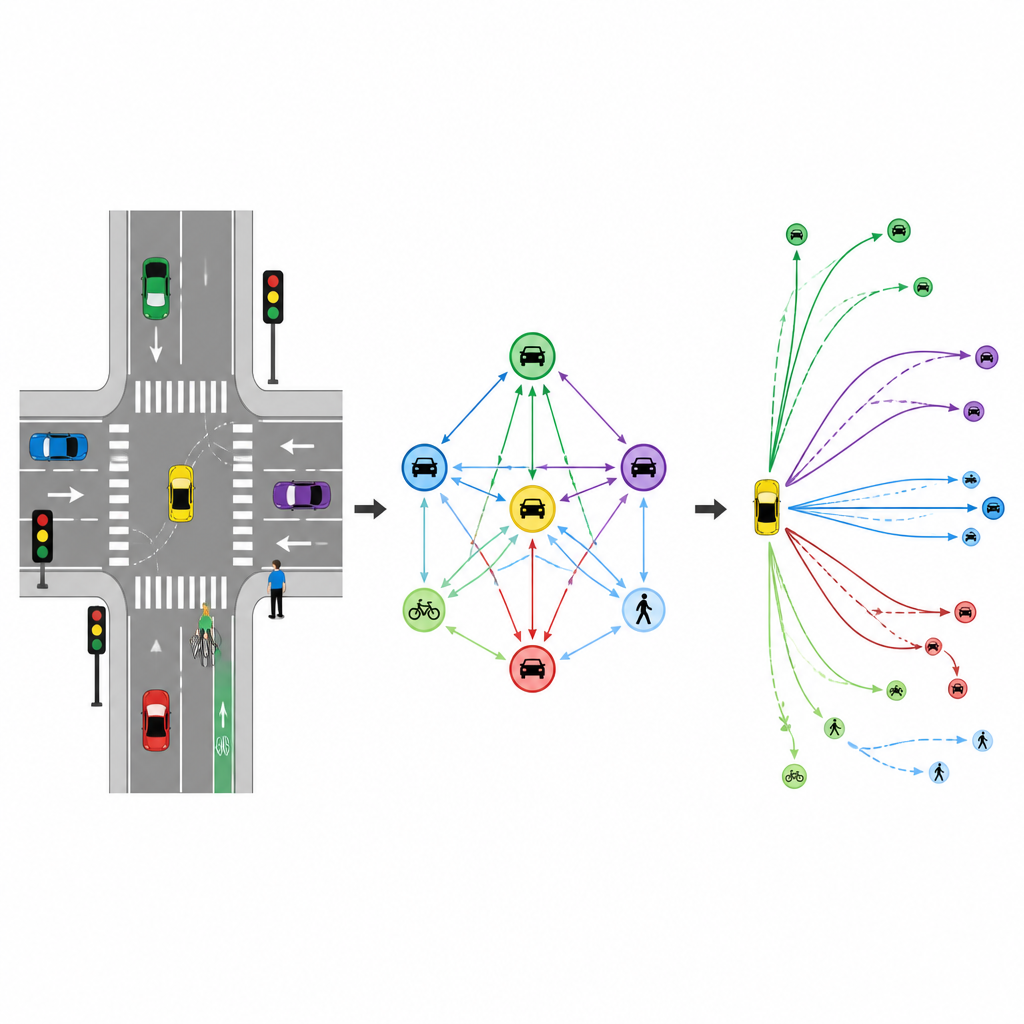
Qué significa esto para los futuros coches autónomos
Para un lector general, el mensaje clave es que las máquinas pueden aprender a “pensar” sobre las intersecciones más como lo hacen los conductores humanos, prestando atención a los vehículos más relevantes, respetando la lógica de las señales y permitiendo muchos estilos de movimiento distintos. TITP muestra que mezclar reglas de tráfico con patrones de movimiento flexibles conduce a estimaciones más precisas de hacia dónde irán coches, ciclistas y peatones a continuación. Tales mejoras en la predicción de trayectorias son un paso importante hacia vehículos automatizados que puedan moverse de forma segura y fluida por calles urbanas complejas.
Cita: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Palabras clave: conducción autónoma, predicción de trayectorias, intersecciones de tráfico, señales de tráfico, reglas de carril