Clear Sky Science · sv
Sammansmälta trafikregler och olika rörelsemönster för förutsägelse av banor i trafikmöten
Varför smartare korsningar är viktiga
Upptagna korsningar är några av de svåraste platserna för självkörande bilar att hantera. Bilar, bussar, cyklar och fotgängare rör sig i många riktningar och reagerar ofta på trafikljus och varandra på bråkdelen av en sekund. I denna studie introduceras ett nytt sätt för datorer att förutse hur alla dessa trafikanvändare kommer att röra sig genom en korsning, med målet att göra automatiserad körning säkrare och smidigare i verklig stadstrafik.
Hur fordon och människor rör sig i verkligheten
Vid en typisk korsning tittar förare inte bara på bilen precis framför dem. De bevakar också fordon i andra körfält som kan skära över deras bana, samtidigt som trafikljusen talar om när de ska starta, stanna eller svänga. Cykel- och motorcyklister kör ibland genom rött på sätt som skiljer sig från bilar, och fotgängare rör sig långsamt i många riktningar. Standardförutsägelsesystem tenderar att behandla alla närliggande trafikanvändare likadant och bortser ofta från signalernas tidssättning, vilket gör det svårt att förutsäga den rika blandning av handlingar som faktiskt utvecklas.
Göra körfält och signaler till en uppmärksamhetskarta
Författarna föreslår en modell kallad TITP som försöker efterlikna hur mänskliga förare mentalt organiserar en korsning. De börjar med en riktad graf som kodar körfältsregler: vilka körfält som leder in i vilka andra och vilka fordon som sannolikt påverkar varandra mest. I detta upplägg riktar en bil som väntar vid rött stark uppmärksamhet mot den första bilen som kommer att köra fram i dess körfält när ljuset blir grönt, och mindre uppmärksamhet mot avlägsna fordon i orelaterade körfält. Denna "körfältsregelgraf" hjälper systemet att fokusera på de mest relevanta grannarna och fånga asymmetrisk påverkan, såsom en snabbt annalkande bil som kraftigt påverkar ett fordon som svänger, även om de inte ligger sida vid sida. 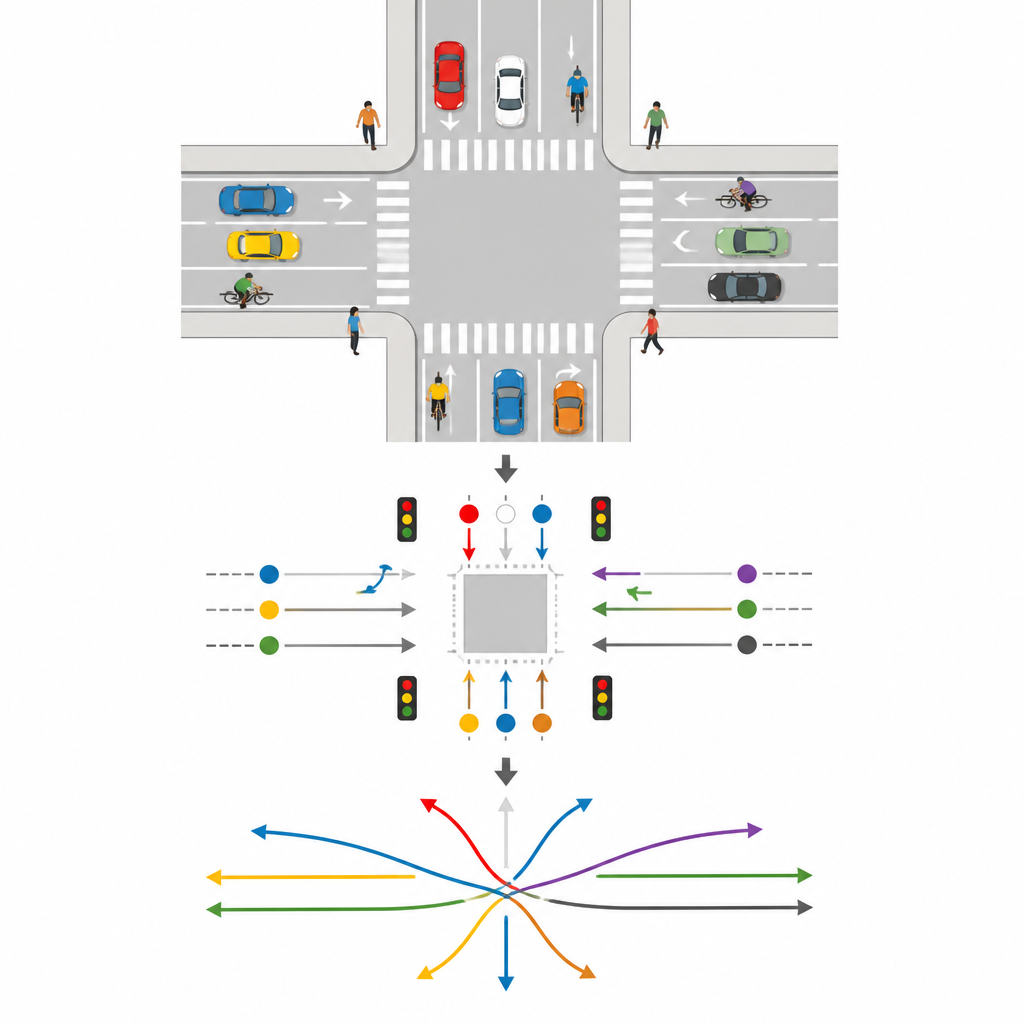
Läsa trafikljus som framtida handlingar
Nästa steg är att modellen omvandlar trafikljusens tillstånd till sannolika rörelsehandlingar. Istället för att behandla rött eller grönt som en enkel av-/på-signal mappar TITP varje tillstånd till en uppsättning lagliga manövrar: köra rakt fram, stanna, svänga vänster eller svänga höger. Till exempel kan en bil i den studerade miljön vid rött lagligen stanna eller göra en höger sväng, medan grönt ljus tillåter alla fyra handlingarna. Systemet jämför dessa mallhandlingar med fordonets senaste rörelser och använder en inlärningsmodul för att välja vilken handling som är mest sannolik. På så vis översätts ljusens färgväxlingar till en sekvens som antyder vad varje förare snart kommer att göra.
Att fånga många rörelsestilar samtidigt
Även med körfältsregler och signaler rör sig ingen två trafikanvändare exakt likadant. För att hantera denna variation förlitar sig inte TITP på ett enda mönster för all rörelse. I stället använder den flera statistiska former, kända som t-fördelningar, var och en anpassad till ett specifikt beteende: stanna, köra rakt, svänga vänster, svänga höger eller gå som fotgängare. Vissa av dessa beteenden, såsom bilar begränsade av styrning, klustrar tätt runt en huvudbana, medan andra, som kringvandrande fotgängare, sprider ut sig över många möjliga riktningar. Genom att justera spridningen för varje fördelning kan modellen beskriva både stabil, förutsägbar körning och mer oförutsägbar rörelse.
Test av modellen på verkliga stadsdata
Forskarlaget utvärderade TITP på två stora samlingar av verklig trafik, inklusive en drönarfilmad korsningsdatamängd i Kina och en kommersiell datamängd för stadsdrift från USA. De jämförde sitt system med två dussin moderna förutsägelsemetoder som använder verktyg som rekurrenta nätverk, grafnätverk och generativa modeller. Över kort- och långsiktiga prognoser och för många typer av trafikanvändare gav TITP mindre positionsfel än konkurrerande tillvägagångssätt. Visuella fallstudier visade att den nya modellen bättre fångade plötsliga accelerationer när ett ljus blev grönt, subtila svängrörelser och undvikande manövrar runt fotgängare, medan äldre modeller ofta antog långsammare hastigheter eller rakare banor än vad som faktiskt skedde. 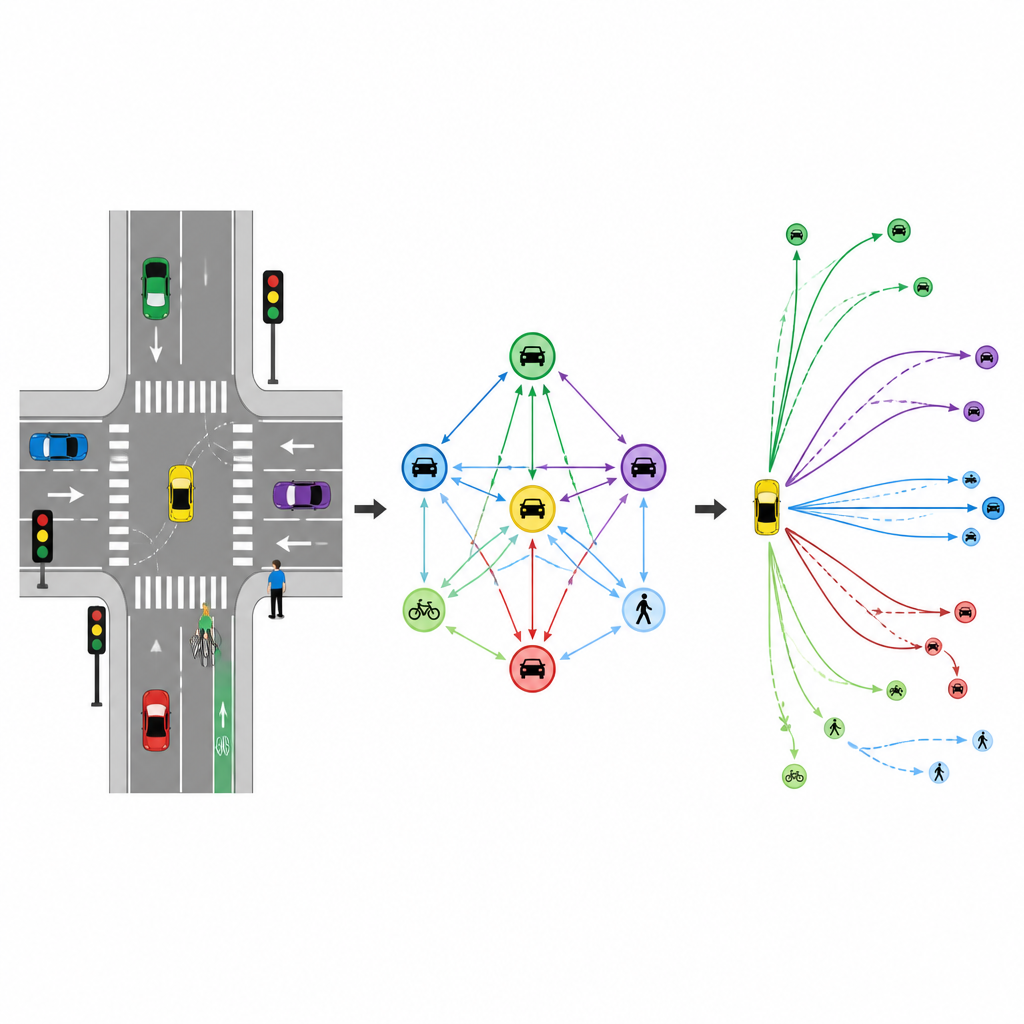
Vad detta betyder för framtida självkörande bilar
För en allmän läsare är huvudbudskapet att maskiner kan lära sig att "tänka" om korsningar mer som mänskliga förare gör, genom att uppmärksamma de mest relevanta fordonen, följa signalernas logik och tillåta många distinkta rörelsestilar. TITP visar att en blandning av trafikregler och flexibla rörelsemönster leder till mer precisa gissningar om vart bilar, cyklister och fotgängare kommer att ta vägen härnäst. Sådana förbättringar i banförutsägelse är ett viktigt steg mot automatiserade fordon som kan röra sig säkert och smidigt genom komplexa stadsgator.
Citering: Su, Y., Pei, C. Fusing transportation rules and diverse motion behaviors for trajectory prediction in traffic intersections. Sci Rep 16, 15915 (2026). https://doi.org/10.1038/s41598-026-46123-7
Nyckelord: autonom körning, banförutsägelse, trafikkorsningar, trafiksignaler, körfältsregler