Clear Sky Science · zh
通过 Mamba 强化的 CM-3DLane 框架实现高效单目三维车道检测
更清晰的数字道路感知
大多数驾驶者在行驶中能自然而然地保持车道。对于自动驾驶汽车来说,理解车道标线在三维空间中的走向则是个复杂难题。本研究提出了 CM-3DLane,一种新的计算机视觉系统,使仅配备单个前视摄像头的车辆能够在坡道、弯道及恶劣天气条件下,更准确且更高效地读取车道的三维形状。
为什么三维车道很重要
如今大多数驾驶辅助系统将车道检测视为平面的二维问题:在摄像头图像或鸟瞰地图上标记车道线。对于简单的高速公路驾驶这通常足够,但在陡坡、匝道和复杂路口时就会失效。平面模型无法完整描述车道线的远近、高低起伏或空间曲率。三维车道检测提供更丰富的空间细节,有助于规划平滑轨迹、维持安全车距并在高速下做出更好的决策。
现有摄像方法的局限
现有基于摄像头的系统通常有两类做法。许多方法先在简单的平路假设下将摄像视图变换为鸟瞰投影,再将这些二维车道提升回三维。这种捷径在道路有坡度或颠簸时会失败,并且会扭曲位于路面上的车辆和其他物体。另一类较新的方法跳过鸟瞰视图,直接将车道建模为空间锚定的三维曲线。尽管理论上更准确,这些方法在实践中面临车道标记细、暗且常常断裂的问题,使得用常规神经网络在远距离处将其断续部分连接起来既困难又计算量巨大。
一种更聪明的单目读车道方法
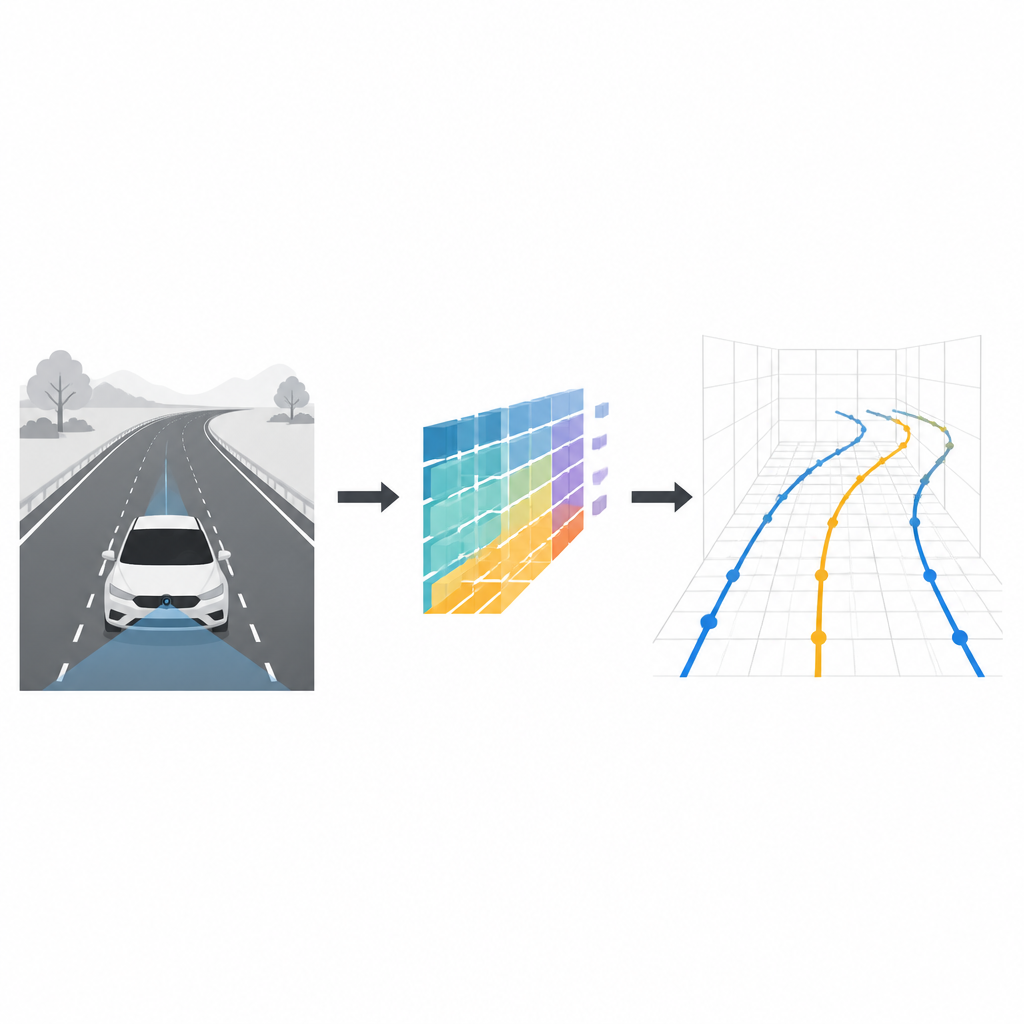
CM-3DLane 框架旨在在保持轻量以适应车载实时应用的同时,捕获车道的细节与宏观结构。它从常规图像网络开始,从前视图中提取多个尺度的特征,覆盖从粗略轮廓到精细纹理。一个跨尺度注意力融合模块随后学习如何混合这些尺度,使得远处细窄的车道与近处粗宽的车道都能被良好处理,同时抑制干扰性的背景纹理。这有助于系统聚焦真实的车道油漆,而非阴影、裂缝或相似的路面标记。
像扫描器一样跟随车道曲线
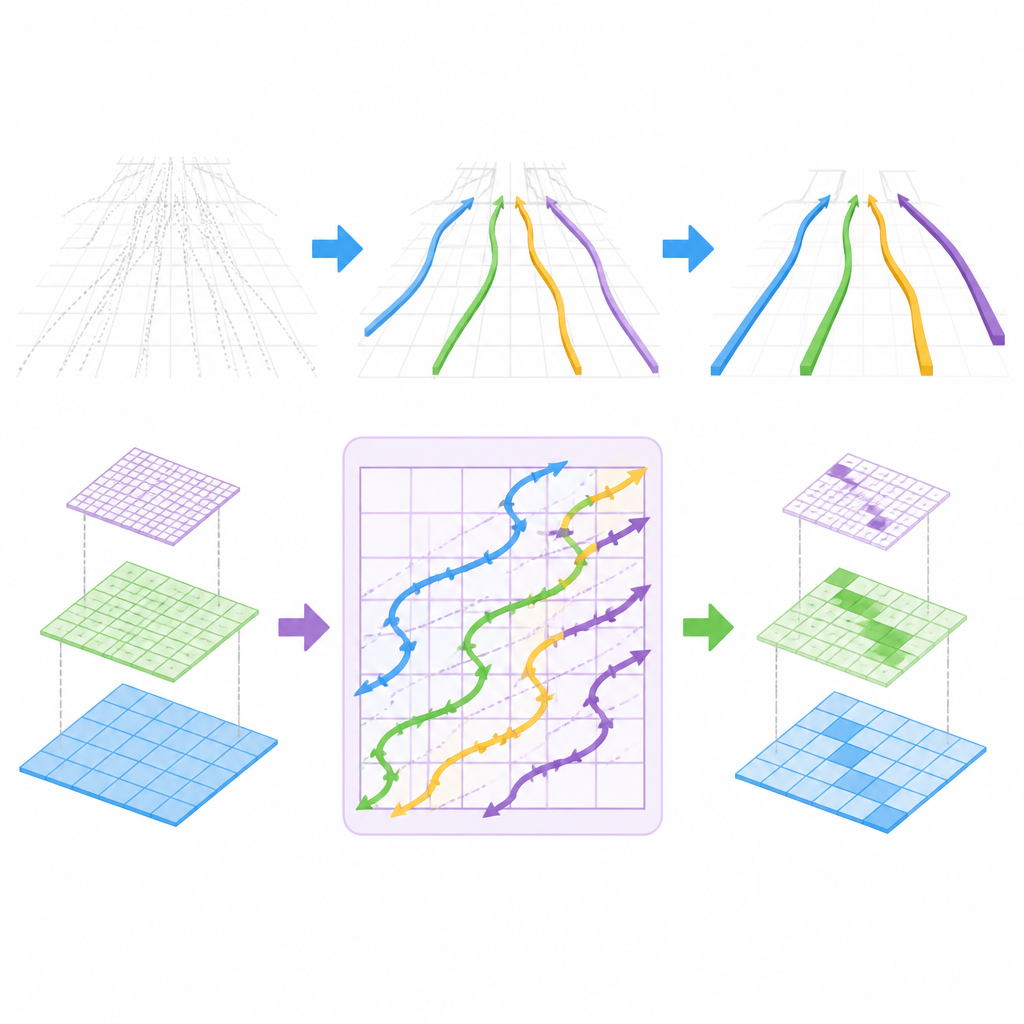
关键创新在于 CM-3DLane 如何建模长程车道结构。作者将一类最近用于快速序列处理的状态空间模型改造为 Lane-Aware Mamba 模块。该模块不是逐行读取图像像素,而是沿着特殊的蜿蜒对角路径扫描特征,这些路径更贴合车道线在远处的自然曲线。这样,它能够在场景的大范围内拼接分散的车道线索,同时保持足够低的计算量以支持实时运行。
仅保留最有用的车道候选
另一个挑战是系统必须考虑许多可能的三维曲线并判断哪些确实对应车道。CM-3DLane 引入了一个精炼锚点动态排序模块,该模块利用一个表示可能车道位置及其局部外观的简单辅助映射对这些候选曲线进行评分。然后它仅保留最有前景的候选,从而减少混淆和计算开销。这个选择步骤由简单的几何规则引导,更偏好平滑且一致的车道形状,而非锯齿状或不可信的曲线。
结果对未来汽车意味着什么
在两个严格基准上测试,包括一个由城市和高速场景构成的大型真实世界数据集,CM-3DLane 达到了超过以往方法的准确率,同时在单张显卡上能以数十帧每秒的速度运行,并在嵌入式车载硬件上仍保持实用性。对于非专业读者,核心结论是该系统让仅配一台摄像头的车辆能够在复杂多变的条件下构建更清晰的车道三维图景,推动在不依赖昂贵深度传感器的情况下实现更安全、更可靠的自动驾驶。
引用: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
关键词: 3D 车道检测, 自动驾驶, 单目视觉, 状态空间模型, 计算机视觉