Clear Sky Science · he
גילוי נתיבי תלת־ממד חד־עיני יעיל באמצעות מסגרת CM-3DLane המשופרת ב־Mamba
חוש כביש דיגיטלי חד יותר
להישאר בבטחה בתוך הנתיב זו פעולה שרוב הנהגים עושים ללא מחשבה. עבור רכבים אוטונומיים, לעומת זאת, הבנת מיקום סימוני הנתיבים בתלת־ממד היא חידה מורכבת. מחקר זה מציג את CM-3DLane, מערכת ראייה ממוחשבת חדשה שמאפשרת לרכב המצויד רק במצלמה קדמית אחת לקרוא את צורת הנתיבים בתלת־ממד בצורה מדויקת ויעילה יותר, גם על גבעות, בפניות ובמזג אוויר קשה.
מדוע נתיבים בתלת־ממד חשובים באמת
מרבית מערכות הסיוע לנהג כיום מתייחסות לגילוי נתיבים כבעיה שטוחה, דו־ממדית: הן מסמנות נתיבים בתמונת המצלמה או במפת Bird’s‑eye של הכביש. זה לרוב מספיק לנסיעה פשוטה בכביש מהיר, אך נכשל במורדות תלולים, במחלפים ובצמתים מורכבים. מודל שטוח אינו מסוגל לתאר במלואו עד כמה קו הנתיב רחוק, כיצד הוא עולה או יורד, או כיצד הוא מתעקם במרחב. גילוי נתיבים בתלת־ממד מספק פירוט מרחבי עשיר יותר, מה שעוזר לתכנון מסלולים חלקים יותר, לשמירה על מרחקים בטוחים ולקבלת החלטות טובות יותר במהירויות גבוהות.
מגבלות השיטות המצלמתיות הנוכחיות
מערכות מבוססות מצלמה קיימות בדרך כלל פועלות באחד משני הכיוונים. רבות מהן קודם מיישרות את תצוגת המצלמה להיטל Bird’s‑eye על בסיס הנחה של כביש שטוח, ואז מרימות את הנתיבים הדו־ממדיים חזרה ל־3D. קיצור דרך זה נכשל כשהכביש משופע או מקומט, וגם מעוות רכבים וחפצים אחרים שיושבים על משטח הכביש. שיטות אחרות דוקרות את ה‑bird’s‑eye ומדמות נתיבים ישירות כעקומות תלת־ממד עוגנות בחלל. אמנם מדויק יותר בעקרון, שיטות כאלה נאבקות מכיוון שסימוני הנתיבים דקים, חלשים ולעיתים קרועי־פסק, מה שמקשה לחבר את חלקיהם המרוחקים באמצעות רשתות נוירונים סטנדרטיות מבלי לצרוך כוח חישוב עצום.
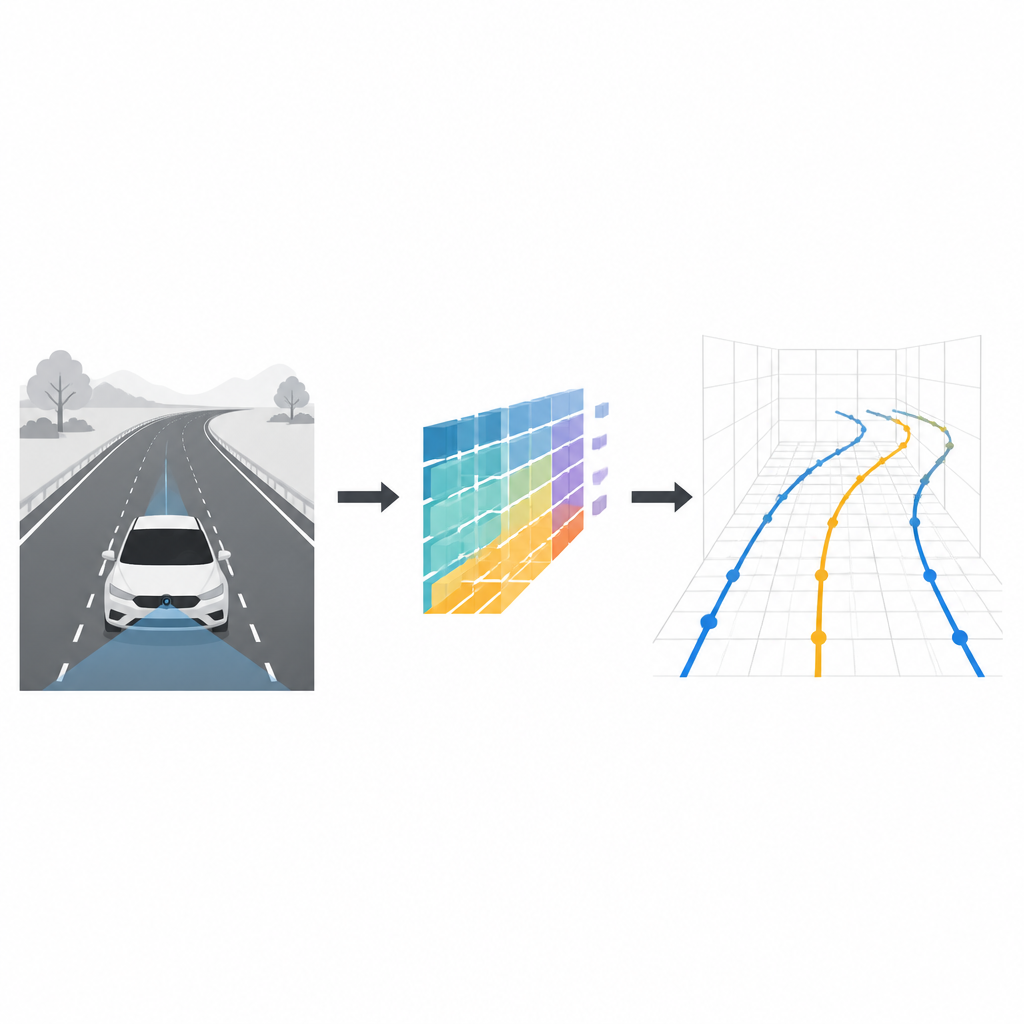
דרך חכמה יותר לקרוא נתיבים ממצלמה אחת
מסגרת CM-3DLane שואפת לתפוס גם את הפרטים העדינים וגם את מבנה התמונה הרחבה של הנתיבים, תוך שמירה על משקל קל דיו לשימוש בזמן אמת ברכב. היא מתחילה ברשת תמונה קונבנציונלית שמחלצת תכונות בכמה קני מידה מתצוגת המצלמה הקדמית, מטקסטורות גסות ועד פרטים עדינים. מודול Cross-Scale Attention Fusion לומד כיצד למזג את הקני־מדה האלה, כך שנטפרות מרוחקות וצרות וגם קרובות ורחבות מטופלות היטב, וטקסטורות רקע מבלבלות מדוכאות. זה עוזר למערכת להתרכז בצבעי הנתיב האמיתיים במקום בצללים, סדקים או סימוני כביש שנראים דומים.
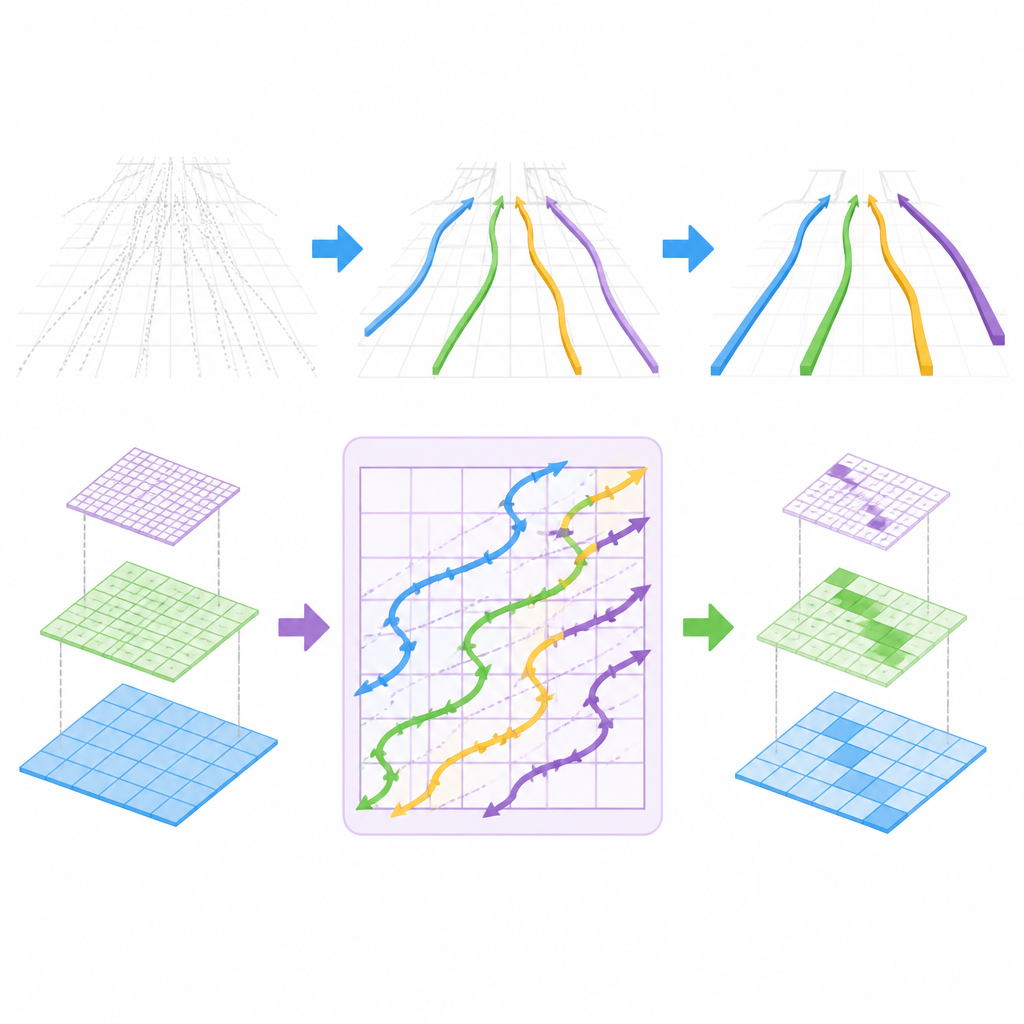
ללכת אחרי עקומות הנתיב כמו סורק
החידוש המרכזי טמון באופן שבו CM-3DLane ממדדת מבנה נתיב לטווח ארוך. המחברים מעבדים משפחה حديثה של מודלים הידועים כמודלי מרחב־מצב, שתוכננו במקור לעיבוד רצפים מהיר, לתוך בלוק Lane-Aware Mamba. במקום לקרוא פיקסלים שורה אחר שורה, הבלוק סורק תכונות לאורך מסלולי אלכסון מתפתלים מיוחדים שעוקבים טוב יותר אחרי עקומות נתיב טבעיות ככל שהן מתרחקות. בכך הוא תופר רמזי נתיב מפוזרים על אזורים גדולים בסצנה, תוך שמירה על חישוב נמוך דיו להפעלה בזמן אמת.
להשאיר רק מועמדי נתיב שימושיים
אתגר נוסף הוא שהמערכת חייבת לשקול עקומות 3D רבות אפשריות ולהחליט אילו מהן אכן תואמות נתיבים. CM-3DLane מציגה מודול Refined Anchor Dynamic Ranking שמדרג את עקומות המועמדים האלה באמצעות מפה עזר פשוטה של מיקומי נתיב סבירים והמראה המקומי שלהם. אחר כך היא שומרת רק על המועמדים המבטיחים ביותר, מקטינה גם בלבול וגם חישוב. שלב הבחירה מונחה על־ידי כללים גיאומטריים פשוטים שמעדיפים צורות נתיב חלקות ועקביות על פני צורות משוננות או בלתי סבירות.
מה המשמעות של התוצאות לרכבים העתידיים
נבדקה על שני מדדי ביצוע תובעניים, כולל מאגר נתונים גדול מהעולם האמיתי שנבנה מתוך סצנות עירוניות וכביש מהיר, CM-3DLane משיגה דיוק גבוה יותר משיטות קודמות בעוד היא רצה בעד עשרות פריימים לשנייה על כרטיס גרפי בודד ונשארת מעשית אפילו על חומרה משובצת ברכב. עבור הקהל שאינו מקצועי, המסר המרכזי הוא שמערכת זו מאפשרת לרכב המצויד רק במצלמה אחת לבנות תמונה תלת־ממדית ברורה יותר של נתיביו בתנאים משתנים ועמוסים, צעד קרוב יותר לנהיגה אוטומטית בטוחה ואמינה ללא הסתמכות על חיישני עומק יקרים.
ציטוט: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
מילות מפתח: גילוי נתיבי 3D, נהיגה אוטונומית, ראייה חד־עינית, מודלי מרחב־מצב, ראייה ממוחשבת