Clear Sky Science · tr
Mamba ile güçlendirilmiş CM-3DLane çerçevesiyle verimli tek lensli 3B şerit tespiti
Daha keskin dijital yol algısı
Şeritte güvenli bir şekilde kalmak çoğu sürücünün düşünmeden yaptığı bir şeydir. Ancak kendi kendine giden araçlar için şerit işaretlerinin üç boyutta nerede olduğunun anlaşılması zorlu bir bulmacadır. Bu çalışma, yalnızca tek bir öne bakan kameraya sahip bir arabanın şeritlerin 3B şeklini daha doğru ve verimli bir biçimde okumasına izin veren CM-3DLane adlı yeni bir bilgisayarla görme sistemini tanıtıyor; bu sistem yokuşlarda, virajlarda ve kötü hava koşullarında bile iyi çalışıyor.
Neden şeritler 3B olarak gerçekten önemli
Bugünün çoğu sürücü yardım sistemi, şerit tespitini düz, iki boyutlu bir problem olarak ele alır: şeritleri kamera görüntüsünde veya yolun kuşbakışı haritasında işaretlerler. Bu, basit otoyol sürüşü için çoğu zaman yeterlidir, ancak dik yokuşlarda, rampa ve karmaşık kavşaklarda başarısız olur. Düz bir model, bir şerit çizgisinin ne kadar uzakta olduğunu, nasıl yükselip alçaldığını veya uzayda nasıl kıvrıldığını tam olarak tanımlayamaz. Üç boyutlu şerit tespiti, daha zengin mekânsal ayrıntı sağlar; bu da düzgün yol planlamaya, güvenli mesafelerin korunmasına ve yüksek hızlarda daha iyi kararlar alınmasına yardımcı olur.
Mevcut kamera yöntemlerinin sınırları
Mevcut kamera tabanlı sistemler genellikle iki yoldan birini izler. Birçoğu önce kamera görüntüsünü basit bir düz yol varsayımı kullanarak kuşbakışı projeksiyona dönüştürür, ardından bu 2B şeritleri 3B’ye yükseltir. Bu kestirme yol, yol eğimli veya tümsekliyse başarısız olur ve yol yüzeyindeki araçlar ve diğer nesneleri de bozabilir. Diğer son yöntemler kuşbakışı görünümü atlayıp şeritleri doğrudan uzayda sabitlenmiş 3B eğriler olarak modellemeyi tercih eder. İlke olarak daha doğru olsa da, bu yaklaşımlar şerit işaretlerinin ince, soluk ve sıklıkla kopuk olması nedeniyle zorluk yaşar; uzak parçaları standart sinir ağlarıyla bağlamak zor ve yüksek hesaplama gerektirebilir.
Tek bir kameradan şeritleri okumak için daha akıllı bir yol
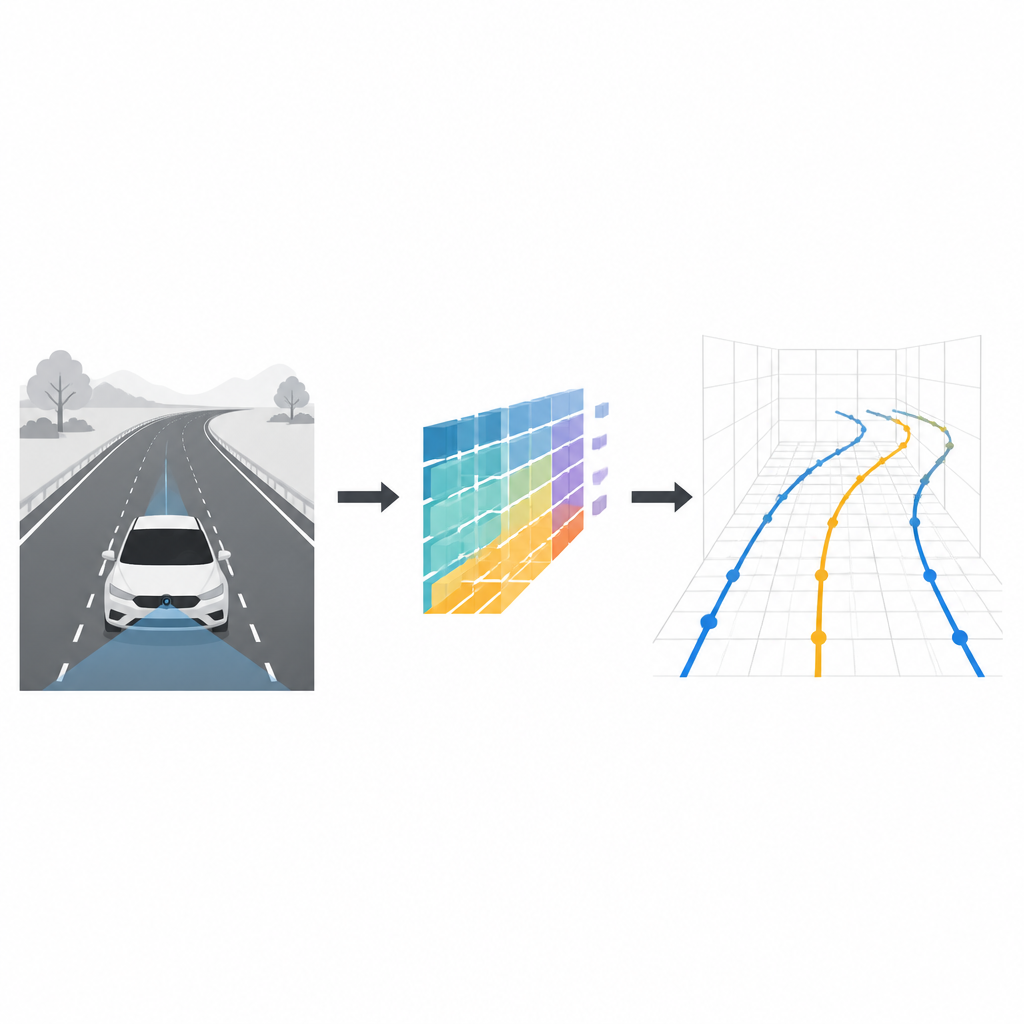
CM-3DLane çerçevesi, şeritlerin hem ince ayrıntılarını hem de büyük resmi yakalarken araçta gerçek zamanlı kullanıma uygun hafifliğini korumayı hedefler. Öne bakan kamera görünümünden gelen özellikleri kaba konturlardan ince dokulara kadar birkaç ölçekte çıkaran konvansiyonel bir görüntü ağıyla başlar. Bir Çapraz-Ölçek Dikkat Birleştirme (Cross-Scale Attention Fusion) modülü daha sonra bu ölçeklerin nasıl harmanlanacağını öğrenir; böylece uzak, dar şeritler ile yakın, geniş olanlar iyi işlenir ve kafa karıştırıcı arka plan dokuları bastırılır. Bu, sistemin gölge, çatlak veya benzer görünen yol işaretleri yerine gerçek şerit boyasına odaklanmasına yardımcı olur.
Tarayıcı gibi şerit eğrilerini izlemek
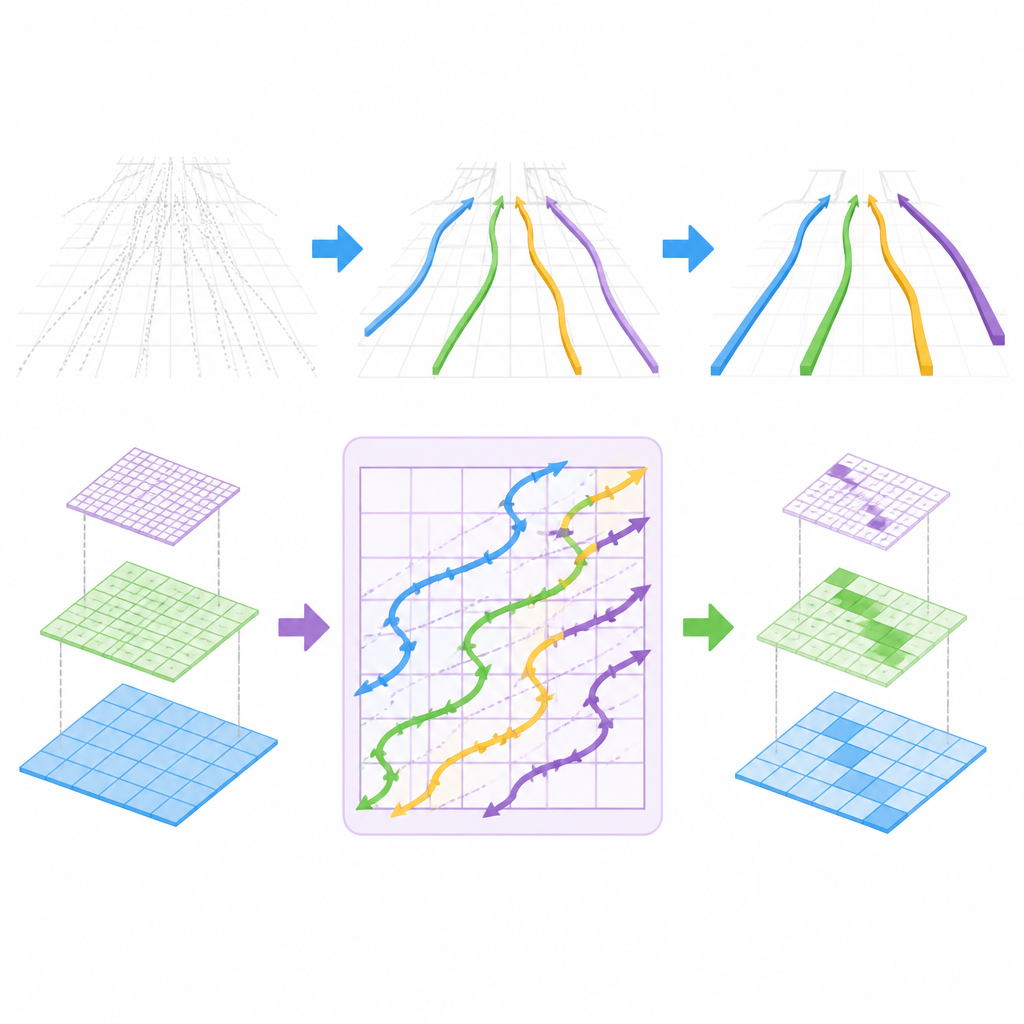
Ana yenilik, CM-3DLane’in uzun menzilli şerit yapısını modelleme biçimindedir. Yazarlar, hızlı dizi işleme için tasarlanmış durum uzayı modelleri ailesinden ilham alarak bunları Lane-Aware Mamba bloğuna uyarlıyor. Bu blok, görüntü piksellerini satır satır okumak yerine, özellikleri uzaklaştıkça doğal şerit eğrilerini daha iyi takip eden yılan biçimli çapraz yollar boyunca tarar. Bu sayede sahnenin geniş alanlarına yayılmış şerit ipuçlarını birleştirir ve hesaplamayı gerçek zamanlı çalışmaya yetecek kadar düşük tutar.
Sadece en yararlı şerit adaylarını tutmak
Diğer bir zorluk, sistemin birçok olası 3B eğriyi değerlendirmesi ve hangilerinin gerçekten şerite karşılık geldiğine karar vermesidir. CM-3DLane, olası şerit pozisyonlarının ve bunların yerel görünümünün basit bir yardımcı haritasını kullanarak bu aday eğrilere puan veren Bir İnceltme Çapa Dinamik Sıralama (Refined Anchor Dynamic Ranking) modülünü tanıtır. Ardından yalnızca en umut verici adayları tutarak hem karışıklığı hem de hesaplamayı azaltır. Bu seçim adımı, pürüzsüz, tutarlı şerit şekillerini keskin veya mantıksız olanlara tercih eden basit geometrik kurallarla yönlendirilir.
Sonuçların gelecekteki araçlar için anlamı
Şehir ve otoyol sahnelerinden oluşturulmuş büyük gerçek dünya veri kümesi dahil olmak üzere iki zorlu kıyaslamada test edilen CM-3DLane, önceki yöntemlerden daha yüksek doğruluk elde ederken tek bir grafik kartta onlarla ifade edilebilecek kare hızlarına kadar çalışabiliyor ve gömülü araç donanımında bile pratik kalıyor. Uzman olmayanlar için çıkarılacak mesaj şudur: sistem, yalnızca bir kameraya sahip bir arabanın değişken ve dağınık koşullarda şeritlerinin daha net bir 3B resmini oluşturmasını sağlar; böylece pahalı derinlik sensörlerine bel bağlamadan daha güvenli ve güvenilir otomatik sürüşe bir adım daha yaklaşır.
Atıf: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Anahtar kelimeler: 3B şerit tespiti, otonom sürüş, tek lens vizyonu, durum uzayı modelleri, bilgisayarla görme