Clear Sky Science · ar
كشف مسارات ثلاثية الأبعاد أحادي العين بكفاءة عبر إطار CM-3DLane المعزَّز بـMamba
إحساس رقمي أوضح للطريق
البقاء بأمان داخل المسار شيء يقوم به معظم السائقين دون تفكير. أما بالنسبة للسيارات ذاتية القيادة، ففهم مكان علامات المسار في ثلاثة أبعاد يمثل تحديًا كبيرًا. تقدم هذه الدراسة CM-3DLane، نظام رؤية حاسوبية جديد يتيح لسيارة مزوَّدة بكاميرا أمامية واحدة فقط قراءة شكل المسارات ثلاثية الأبعاد بدقة وكفاءة أكبر، حتى على التلال والمنعطفات وفي الطقس السيئ.
لماذا تهم المسارات ثلاثية الأبعاد حقًا
تعامل معظم أنظمة مساعدة السائق الحالية كشف المسارات كمشكلة ثنائية الأبعاد: تميّز المسارات على صورة الكاميرا أو على خريطة علوية للطرقات. هذا غالبًا ما يكفي للقيادة البسيطة على الطرق السريعة، لكنه يفشل على التلال الشديدة والمنحدرات والتقاطعات المعقّدة. النموذج المسطح لا يستطيع وصف مدى بعد خط المسار بدقة، أو كيف يرتفع أو ينخفض، أو كيف ينحني في الفراغ. يوفر الكشف ثلاثي الأبعاد تفاصيل مكانية أغنى تساعد على تخطيط مسارات أكثر سلاسة، والحفاظ على مسافات آمنة، واتخاذ قرارات أفضل عند السرعات العالية.
حدود طرق الكاميرا الحالية
تعمل الأنظمة القائمة على الكاميرا عادة بإحدى طريقتين. كثير منها يغيّر أولاً منظور الكاميرا إلى إسقاط علوي (bird’s-eye) بافتراض أن الطريق مسطح، ثم يرفع تلك الخطوط ثنائية الأبعاد إلى ثلاثية الأبعاد. هذا الاختصار يفشل عندما يميل الطريق أو يحتوي على مطبات، كما يشوّه السيارات والأجسام الأخرى الواقعة على سطح الطريق. طرق حديثة أخرى تتخطى العرض العلوي وتقوم بنمذجة المسارات مباشرة كمنحنيات ثلاثية الأبعاد مثبتة في الفراغ. وعلى الرغم من أن ذلك أدق من حيث المبدأ، إلا أن هذه الأساليب تعاني لأن علامات المسار رقيقة وباهتة وغالبًا ما تكون مكسورة، ما يجعل ربط قطعها البعيدة باستخدام الشبكات العصبية القياسية صعبًا ويتطلب طاقة حسابية ضخمة.
طريقة أذكى لقراءة المسارات من كاميرا واحدة
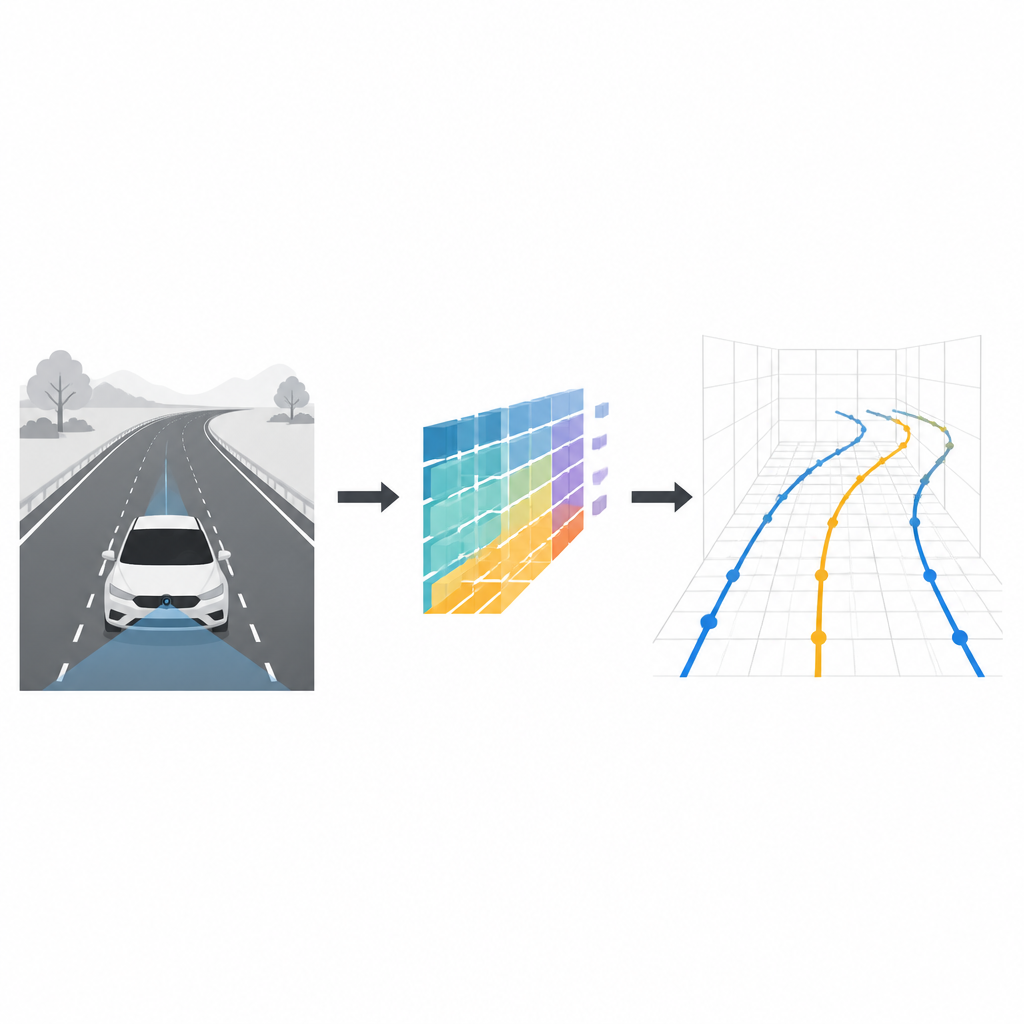
يهدف إطار CM-3DLane إلى التقاط كل من التفاصيل الدقيقة والبنية الكبرى للمسارات مع الحفاظ على خفة كافية للعمل في الزمن الحقيقي داخل السيارة. يبدأ بشبكة صور تقليدية تستخرج ميزات على عدة مقاييس من منظر الكاميرا الأمامي، من المخططات العامة إلى التفاصيل الدقيقة. ثم يتعلم موديل دمج الانتباه عبر المقاييس (Cross-Scale Attention Fusion) كيفية مزج هذه المقاييس، بحيث تُعالَج المسارات البعيدة الضيقة والقريبة العريضة بشكل جيد، وتُخفَّض النصوص الخلفية المُربِكة. يساعد ذلك النظام على التركيز على طلاء المسار الحقيقي بدل الظلال أو الشقوق أو علامات الطريق التي تبدو مشابهة.
اتباع منحنيات المسار مثل الماسح
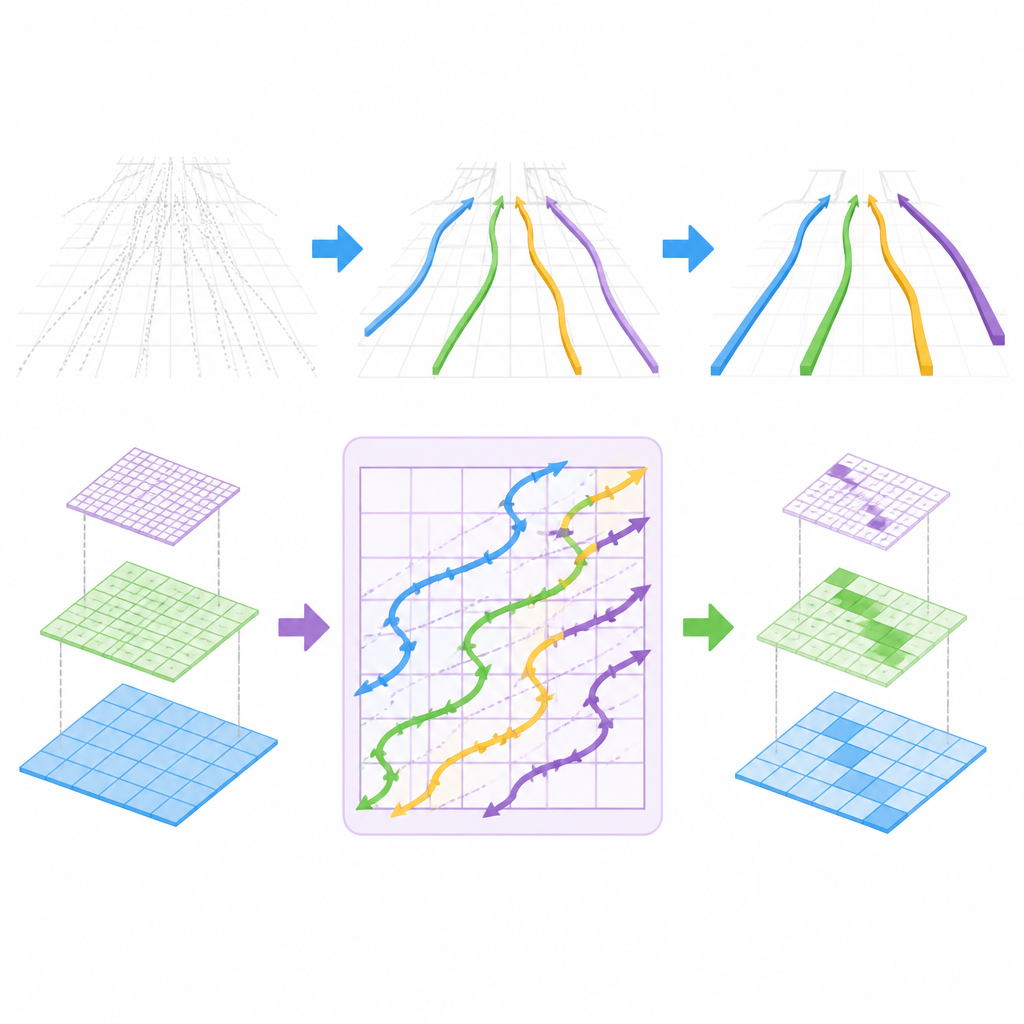
الابتكار الرئيسي يكمن في كيفية نمذجة CM-3DLane للبنية بعيدة المدى للمسار. يكيّف المؤلفون عائلة حديثة من النماذج المعروفة بنماذج فضاء الحالة، المصممة أصلاً لمعالجة التسلسلات بسرعة، إلى كتلة Mamba الواعية بالمسار. بدل قراءة بكسلات الصورة صفًا بصف، تمسح هذه الكتلة الميزات على مسارات قطريَّة متعرِّجة خاصة تتبع بشكل أفضل منحنيات المسار الطبيعية أثناء تراجعها في البعد البعيد. وبذلك تربط دلائل المسار المبعثرة عبر مناطق واسعة من المشهد، مع إبقاء الحساب منخفضًا بما يكفي للتشغيل في الزمن الحقيقي.
الاحتفاظ فقط بمرشحي المسار الأكثر فائدة
تحدٍ آخر هو أن النظام يجب أن ينظر في العديد من المنحنيات الثلاثية الأبعاد المحتملة ويقرر أيها تتوافق فعلاً مع المسارات. يقدم CM-3DLane وحدة ترتيب ديناميكي للمرفقات المنقّحة (Refined Anchor Dynamic Ranking) التي تُقيّم هذه المنحنيات المرشحة باستخدام خريطة مساعدة بسيطة لمواقع المسار المحتملة ومظهرها المحلي. ثم يحتفظ فقط بالمرشحين الأكثر وعدًا، مما يقلل كلًا من الارتباك والحساب. تستنير خطوة الاختيار هذه بقواعد هندسية بسيطة تُفضّل الأشكال الملساء والمتسقة للمسار على الأشكال المتعرجة أو غير المعقولة.
ماذا تعني النتائج للسيارات المستقبلية
اختُبر النظام على معيارين صارمين، بما في ذلك مجموعة بيانات عالمية كبيرة من مشاهد المدينة والطريق السريع، وحقق CM-3DLane دقة أعلى من الطرق السابقة بينما يعمل بسرعة تصل إلى عشرات الإطارات في الثانية على بطاقة رسومية واحدة ويظل عمليًا حتى على أجهزة مضمنة داخل السيارة. للخُصوصيين غير المتخصصين، الخلاصة هي أن النظام يسمح لسيارة بكاميرا واحدة فقط ببناء صورة ثلاثية الأبعاد أوضح لمساراتها في ظروف متنوعة وفوضوية، ما يقرب خطوة نحو قيادة آلية أكثر أمانًا وموثوقية دون الاعتماد على مجسات عمق باهظة الثمن.
الاستشهاد: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
الكلمات المفتاحية: كشف مسارات ثلاثية الأبعاد, القيادة الذاتية, الرؤية الأحادية, نماذج فضاء الحالة, رؤية حاسوبية