Clear Sky Science · ja
マンバ強化CM-3DLaneフレームワークによる効率的な単眼3D車線検出
より鮮明なデジタル道路感覚
車線を安全に走行することは大多数のドライバーにとって無意識に行うことだ。しかし自動運転車にとって、車線表示が三次元的にどこを通っているかを理解するのは難しい課題である。本研究はCM-3DLaneを紹介する。これは単一の前方カメラだけで、坂道やカーブ、悪天候でも車線の3D形状をより正確かつ効率的に読み取れるコンピュータビジョンシステムだ。
なぜ車線の3Dが重要なのか
現在の多くの運転支援システムは車線検出を平面的な2次元問題として扱う:カメラ画像上や俯瞰の道路地図上に車線を描く。これは高速道路など単純な状況では十分なことが多いが、急な坂道やランプ、複雑な分岐では破綻する。平面モデルでは車線の距離、上り下り、空間での曲がり具合を十分に表現できない。3次元車線検出はより豊かな空間情報を与え、滑らかな軌道計画、安全な車間保持、高速走行時のより良い判断に役立つ。
既存のカメラ手法の限界
既存のカメラベースの手法は大きく二通りに分かれる。多くはまず平坦な道路を仮定してカメラビューを鳥瞰投影に変換し、そこで得た2D車線を3Dに持ち上げる。道路が傾いていたり凹凸があるとこの近道は失敗し、道路上の車両や物体も歪めてしまう。最近の他の手法は鳥瞰を経ずに、車線を空間に固定された3D曲線として直接モデル化する。原理的にはより正確だが、車線表示は細く薄く途切れがちで、標準的なニューラルネットワークでは遠くに散らばる断片をつなげるのが困難で、膨大な計算資源を消費してしまう。
単一カメラから車線を賢く読む方法
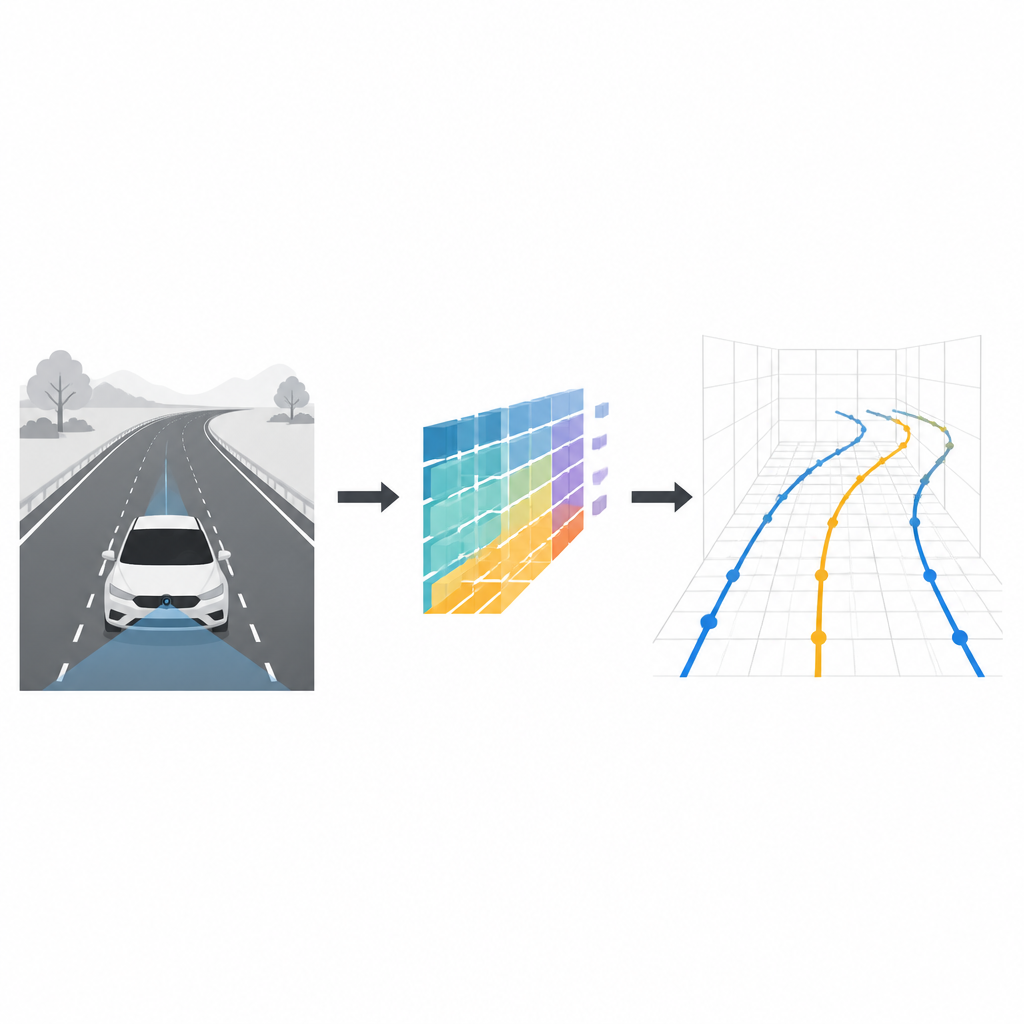
CM-3DLaneフレームワークは、車線の細部と大局構造の両方を捉えつつ、車載でリアルタイムに動作できる軽量性を目指している。まず従来型の画像ネットワークで前方カメラ画像から複数のスケールの特徴を抽出し、粗い輪郭から細かなテクスチャまでを得る。次にCross-Scale Attention Fusionモジュールがこれらのスケールをどのように融合するかを学習し、遠方で細い車線と近傍で広い車線の両方をうまく扱い、背景の紛らわしいテクスチャを抑制する。これにより影やひび割れ、類似した道路表示ではなく、実際の車線塗装に焦点を当てやすくなる。
走査器のように車線曲線をたどる
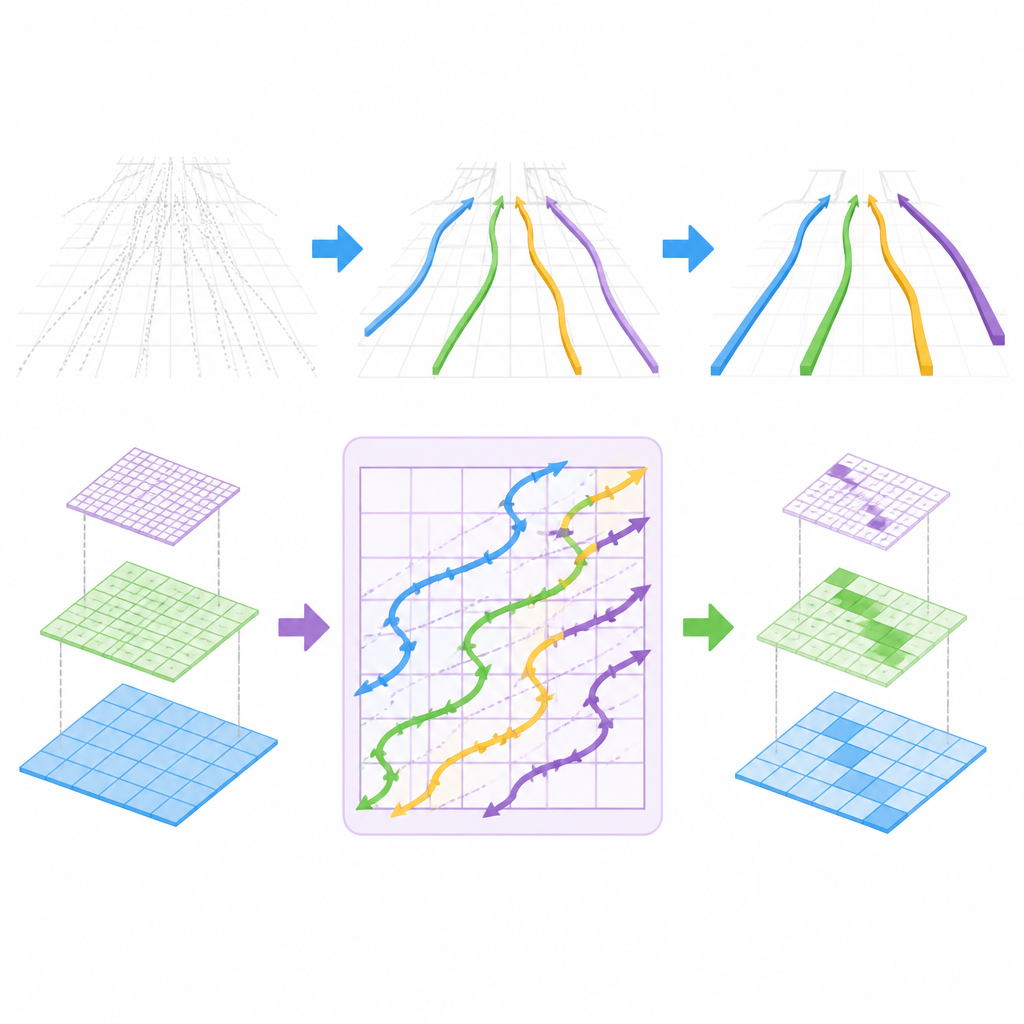
CM-3DLaneの重要な革新は長距離の車線構造をモデル化する方法にある。著者らは高速な系列処理のために設計された状態空間モデルの最近の系列を、Lane-Aware Mambaブロックに適応した。このブロックは画像ピクセルを行ごとに読む代わりに、特徴を自然な車線曲線が遠方に消える方向に沿うような特別な蛇行する対角線パスで走査する。こうしてシーンの広い領域に散らばる車線の手がかりをつなぎ合わせつつ、リアルタイム動作に耐える低い計算量を保っている。
最も有用な車線候補だけを残す
もう一つの課題は、多くの候補となる3D曲線の中から実際の車線に対応するものを選ぶ必要がある点だ。CM-3DLaneはRefined Anchor Dynamic Rankingモジュールを導入し、候補曲線を推定される車線位置と局所的な外観を示す単純な補助マップでスコアリングする。そして最も有望な候補だけを残し、混乱と計算を削減する。この選択ステップは滑らかで一貫した車線形状を優先し、ギザギザやあり得ない形状を排する単純な幾何学的ルールに導かれる。
結果が未来の車に示すもの
市街地や高速道路のシーンを含む大規模な実データセットなど、2つの厳しいベンチマークで評価したところ、CM-3DLaneは従来手法より高い精度に達し、単一のグラフィックスカードで毎秒数十フレームまで動作し、組込みの車載ハードウェアでも実用的であることが示された。専門外の読者にとっての要点は、本システムにより単一カメラ搭載の車でも多様で乱れた条件下で車線のより鮮明な3D像を構築できるようになり、高価な深度センサーに頼らずにより安全で信頼性の高い自動運転に一歩近づいた、ということである。
引用: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
キーワード: 3D車線検出, 自動運転, 単眼視覚, 状態空間モデル, コンピュータビジョン