Clear Sky Science · es
Detección monocular 3D de carriles eficiente mediante el marco CM-3DLane mejorado con Mamba
Una percepción digital de la carretera más nítida
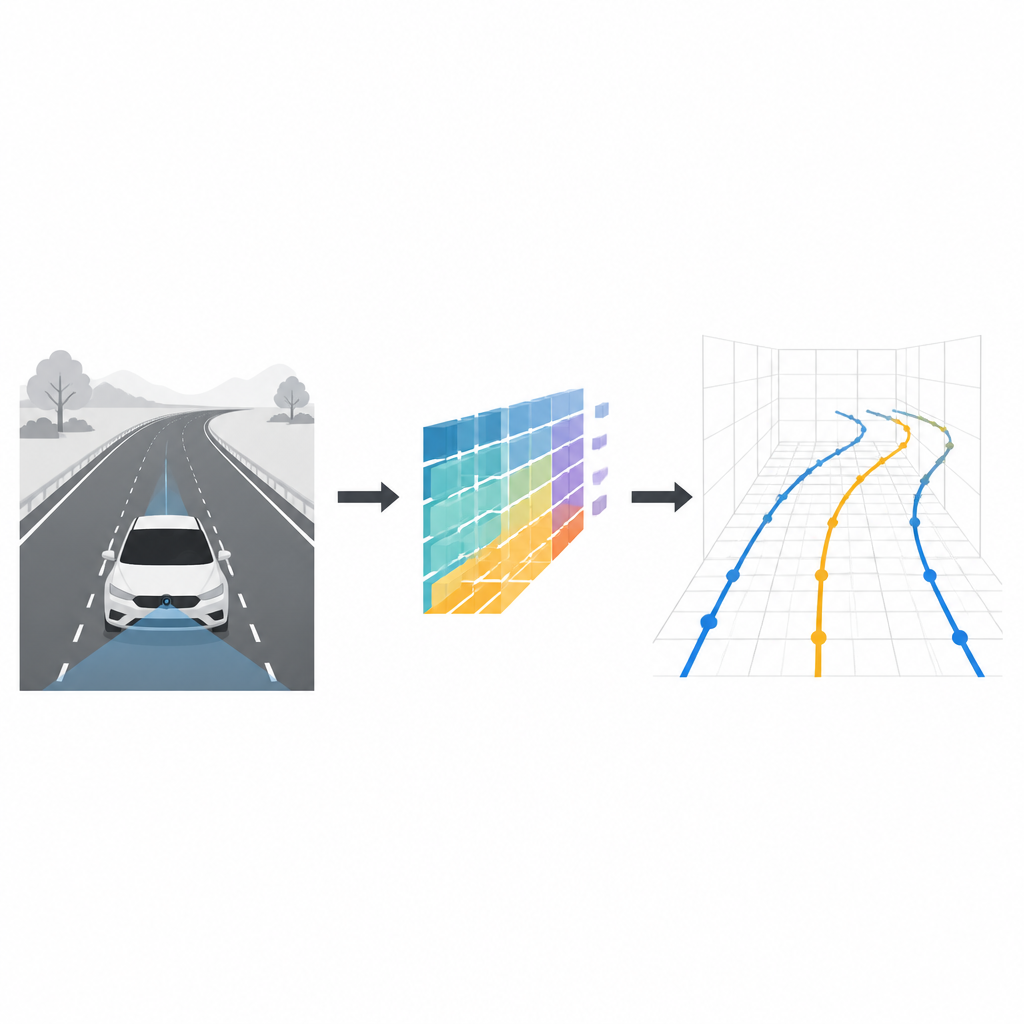
Mantenerse con seguridad en el carril es algo que la mayoría de conductores hace sin pensar. Para los coches autónomos, sin embargo, entender dónde discurren las marcas del carril en tres dimensiones es un reto exigente. Este estudio presenta CM-3DLane, un nuevo sistema de visión por ordenador que permite a un vehículo con solo una cámara frontal leer la forma de los carriles en 3D con mayor precisión y eficiencia, incluso en cuestas, curvas y con mal tiempo.
Por qué los carriles en 3D importan realmente
La mayoría de los sistemas de asistencia hoy tratan la detección de carriles como un problema plano y bidimensional: marcan los carriles en la imagen de la cámara o en una vista cenital del mapa de la carretera. Eso suele ser suficiente para conducir en autopista, pero falla en pendientes pronunciadas, rampas y en cruces complejos. Un modelo plano no puede describir completamente a qué distancia está una línea de carril, cómo sube o baja, o cómo se curva en el espacio. La detección tridimensional de carriles ofrece un detalle espacial más rico, lo que ayuda a planificar trayectorias suaves, mantener distancias seguras y tomar mejores decisiones a alta velocidad.
Límites de los métodos actuales basados en cámara
Los sistemas basados en cámara existentes suelen funcionar de dos maneras. Muchos primero deforman la vista de la cámara a una proyección cenital usando la suposición de carretera plana, y luego elevan esos carriles 2D de nuevo a 3D. Este atajo falla cuando la carretera tiene pendientes o baches, y además distorsiona vehículos y otros objetos que están sobre la superficie de la calzada. Otros métodos recientes omiten la vista cenital y modelan los carriles directamente como curvas 3D ancladas en el espacio. Aunque son más precisos en principio, estos enfoques sufren porque las marcas de carril son finas, tenues y a menudo están discontinuas, lo que dificulta conectar sus fragmentos lejanos con redes neuronales estándar sin consumir una enorme potencia de cálculo.
Una forma más inteligente de leer carriles desde una sola cámara
El marco CM-3DLane pretende capturar tanto los detalles finos como la estructura global de los carriles, manteniéndose lo bastante ligero para uso en tiempo real en un vehículo. Comienza con una red de imagen convencional que extrae características a varias escalas desde la vista frontal de la cámara, desde contornos gruesos hasta texturas finas. Un módulo de Fusión de Atención Inter‑Escalas aprende entonces a mezclar estas escalas, de modo que tanto los carriles lejanos y estrechos como los cercanos y anchos se manejan bien, y se suprimen texturas de fondo confusas. Esto ayuda al sistema a centrarse en la pintura real del carril en lugar de sombras, grietas o marcas viales que se asemejan.
Seguir curvas de carril como un escáner
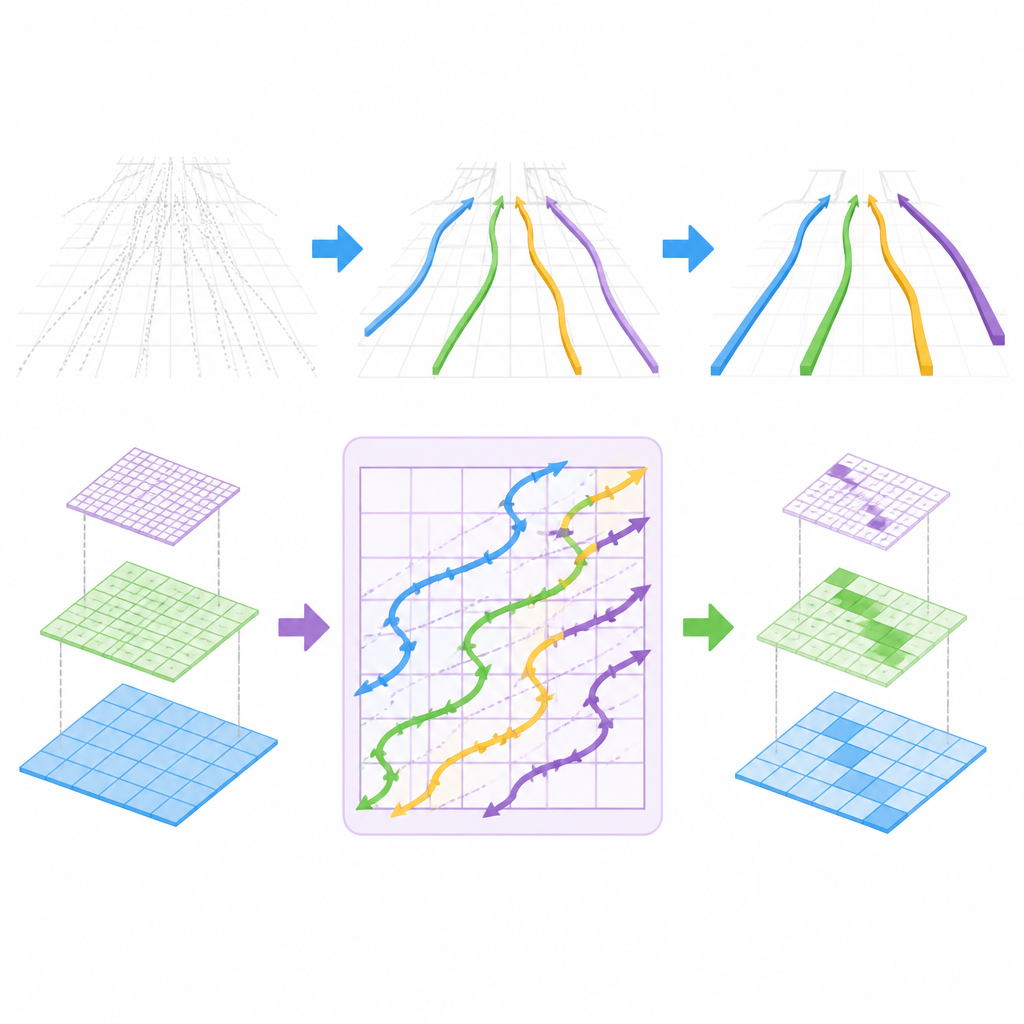
La innovación clave reside en cómo CM-3DLane modela la estructura de carril a larga distancia. Los autores adaptan una familia reciente de modelos conocidos como modelos de espacio de estados, originalmente diseñados para el procesamiento rápido de secuencias, dentro de un bloque Lane‑Aware Mamba. En lugar de leer los píxeles de la imagen fila por fila, este bloque escanea las características a lo largo de rutas diagonales serpenteantes especiales que siguen mejor las curvas naturales de los carriles a medida que se alejan en la distancia. Al hacerlo, cose pistas dispersas de carril a lo largo de grandes áreas de la escena, manteniendo al mismo tiempo el cómputo lo bastante bajo para operar en tiempo real.
Mantener solo los candidatos de carril más útiles
Otro desafío es que el sistema debe considerar muchas posibles curvas 3D y decidir cuáles corresponden realmente a carriles. CM-3DLane introduce un módulo de Clasificación Dinámica de Anclas Refinada que puntúa estas curvas candidatas usando un mapa auxiliar simple de posiciones probables de carril y su apariencia local. Luego conserva solo los candidatos más prometedores, reduciendo tanto la confusión como el cálculo. Este paso de selección está guiado por reglas geométricas sencillas que prefieren formas de carril suaves y consistentes frente a las dentadas o poco plausibles.
Qué significan los resultados para los coches del futuro
Probado en dos benchmarks exigentes, incluido un gran conjunto de datos del mundo real construido a partir de escenas urbanas y de autopista, CM-3DLane alcanza mayor precisión que métodos previos mientras funciona a decenas de fotogramas por segundo en una sola tarjeta gráfica y sigue siendo práctico incluso en hardware embebido para vehículos. Para no especialistas, la conclusión es que el sistema permite a un coche con una sola cámara construir una imagen 3D más clara de sus carriles en condiciones variadas y desordenadas, acercando un paso más la conducción automatizada más segura y fiable sin depender de costosos sensores de profundidad.
Cita: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Palabras clave: detección de carriles 3D, conducción autónoma, visión monocular, modelos de espacio de estados, visión por ordenador