Clear Sky Science · de
Effiziente monoculare 3D-Fahrspurerkennung durch Mamba-verbessertes CM-3DLane-Framework
Scharfere digitale Straßenwahrnehmung
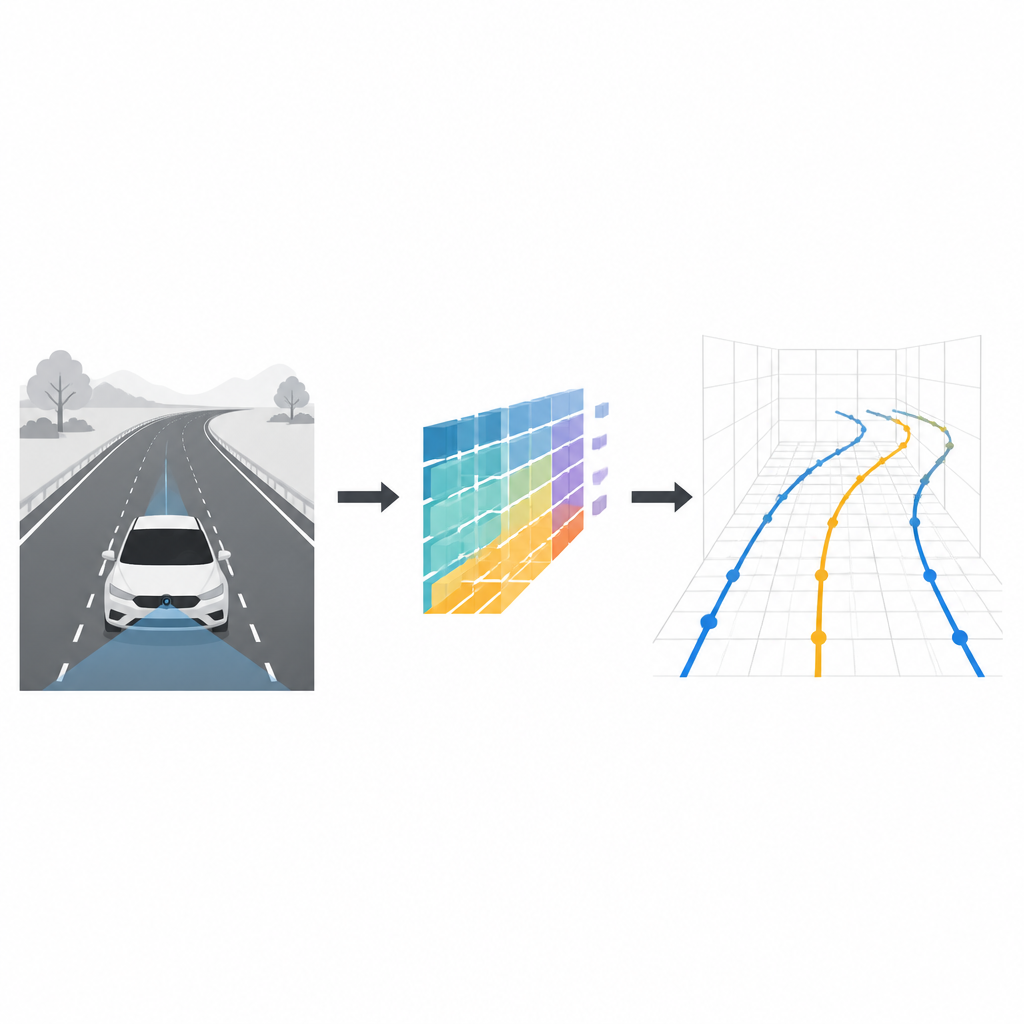
Im Fahralltag bleiben die meisten Fahrer ganz selbstverständlich in ihrer Spur. Für autonome Fahrzeuge ist es dagegen eine anspruchsvolle Aufgabe, nachzuvollziehen, wie sich Fahrbahnmarkierungen dreidimensional verhalten. Diese Studie stellt CM-3DLane vor, ein neues Computer-Vision-System, mit dem ein Fahrzeug, das nur über eine einzelne Frontkamera verfügt, die Form von Fahrspuren in 3D genauer und effizienter erfassen kann – selbst bei Steigungen, Kurven und schlechtem Wetter.
Warum Fahrspuren in 3D wirklich wichtig sind
Die meisten Fahrerassistenzsysteme behandeln Fahrspurerkennung heute als zweidimensionales Problem: Sie markieren Spuren im Kamerabild oder auf einer Vogelperspektive der Straße. Das reicht oft für einfache Autobahnfahrt, versagt aber bei steilen Anstiegen, Rampen und komplexen Kreuzungen. Ein flaches Modell kann nicht vollständig angeben, wie weit eine Fahrspur entfernt ist, wie sie steigt oder fällt oder wie sie sich im Raum krümmt. Dreidimensionale Fahrspurerkennung liefert reichere räumliche Informationen, die helfen, glattere Fahrbahnen zu planen, sichere Abstände einzuhalten und bessere Entscheidungen bei hoher Geschwindigkeit zu treffen.
Grenzen aktueller Kameramethoden
Bestehende kamera-basierte Systeme arbeiten meist auf eine von zwei Arten. Viele verformen zunächst die Kameransicht in eine Vogelperspektive unter der Annahme einer ebenen Straße und heben dann diese 2D-Spuren zurück in 3D an. Diese Abkürzung versagt, wenn die Straße geneigt oder holprig ist, und verzerrt zudem Fahrzeuge und andere Objekte auf der Fahrbahn. Andere neuere Methoden verzichten auf die Vogelperspektive und modellieren Fahrspuren stattdessen direkt als im Raum verankerte 3D-Kurven. Zwar sind diese Ansätze prinzipiell genauer, sie tun sich jedoch schwer, weil Fahrbahnmarkierungen dünn, schwach sichtbar und oft unterbrochen sind, was es schwierig macht, entfernte Segmentstücke mit Standard-Neuralnetzen zu verbinden, ohne enormen Rechenaufwand zu betreiben.
Ein klügerer Weg, Fahrspuren mit einer Kamera zu erfassen
Das CM-3DLane-Framework zielt darauf ab, sowohl feine Details als auch die großräumige Struktur von Fahrspuren zu erfassen und dabei leichtgewichtig genug für den Echtzeitbetrieb im Fahrzeug zu bleiben. Es beginnt mit einem konventionellen Bildnetzwerk, das Merkmale auf mehreren Skalen aus der Frontkamera extrahiert – von groben Umrissen bis zu feinen Texturen. Ein Cross-Scale Attention Fusion-Modul lernt dann, diese Skalen zu verschmelzen, sodass sowohl entfernte, schmale Spuren als auch nahe, breite Spuren gut verarbeitet werden und störende Hintergrundstrukturen unterdrückt werden. Das hilft dem System, sich auf echte Fahrbahnmarkierungen statt auf Schatten, Risse oder ähnliche Straßenzeichen zu konzentrieren.
Fahrspuren wie mit einem Scanner verfolgen
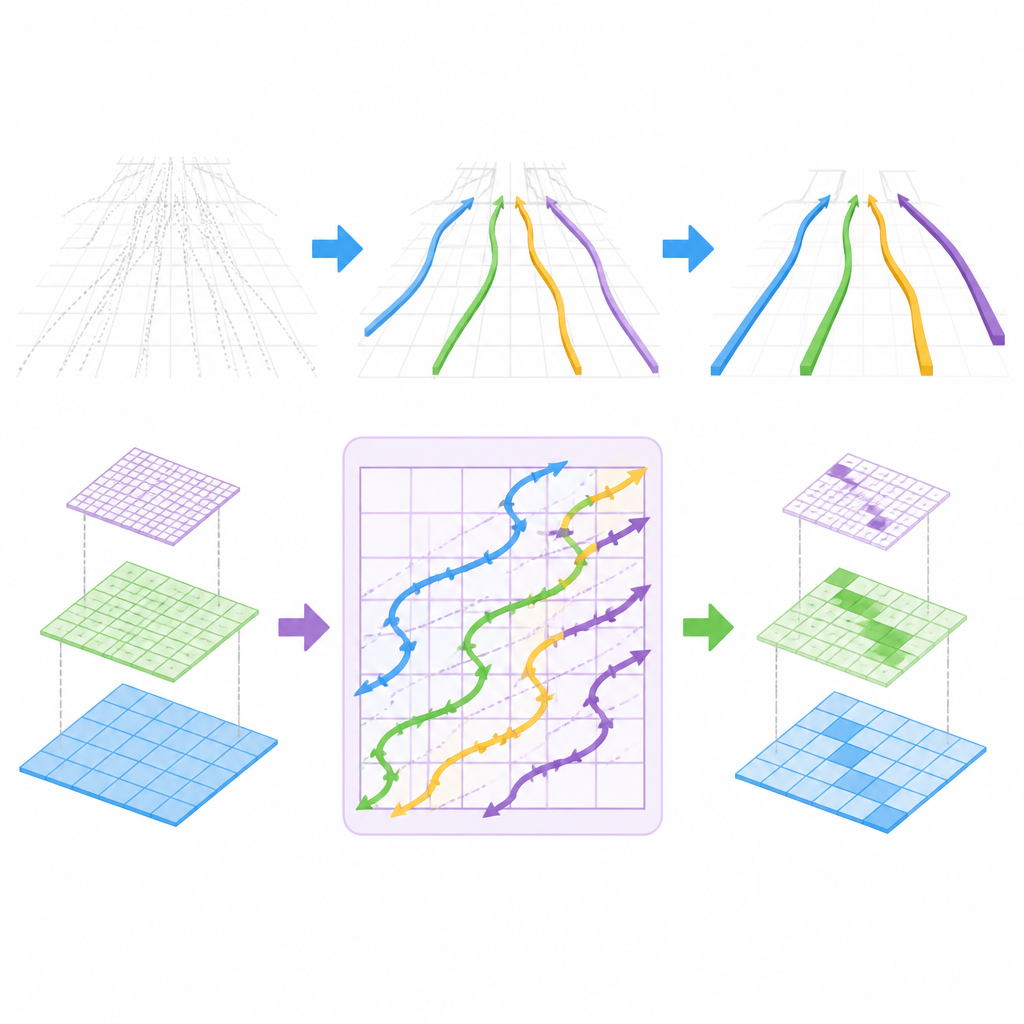
Die wesentliche Neuerung liegt in der Modellierung großräumiger Fahrspurstruktur durch CM-3DLane. Die Autoren adaptieren eine neuere Modellfamilie, bekannt als Zustandsraummodelle, die ursprünglich für schnelle Sequenzverarbeitung entwickelt wurden, in einen Lane-Aware Mamba-Block. Anstatt Bildpixel Zeile für Zeile zu lesen, scannt dieser Block Features entlang spezieller, schlangenförmiger Diagonalpfade, die den natürlichen Fahrspurkrümmungen folgen, wenn sie in die Ferne verschwinden. Dadurch verbindet er verstreute Fahrspurinformationen über große Bildbereiche hinweg und hält gleichzeitig den Rechenaufwand niedrig genug für den Echtzeitbetrieb.
Nur die nützlichsten Fahrspurkandidaten behalten
Eine weitere Herausforderung ist, dass das System viele mögliche 3D-Kurven in Betracht ziehen und entscheiden muss, welche davon tatsächlich Fahrspuren entsprechen. CM-3DLane führt ein Refined Anchor Dynamic Ranking-Modul ein, das diese Kandidatenkurven mithilfe einer einfachen Hilfskarte mit wahrscheinlichen Fahrspurpositionen und deren lokalem Erscheinungsbild bewertet. Anschließend behält es nur die vielversprechendsten Kandidaten, wodurch sowohl Verwirrung als auch Rechenaufwand reduziert werden. Dieser Auswahlschritt wird durch einfache geometrische Regeln geleitet, die glatte, konsistente Fahrspuren gegenüber zackigen oder unwahrscheinlichen Formen bevorzugen.
Was die Ergebnisse für zukünftige Fahrzeuge bedeuten
Getestet auf zwei anspruchsvollen Benchmarks, darunter ein großes Realwelt-Datenset aus Stadt- und Autobahnszenen, erreicht CM-3DLane eine höhere Genauigkeit als frühere Methoden und läuft mit bis zu Dutzenden Bildern pro Sekunde auf einer einzigen Grafikkarte, wobei es selbst auf eingebetteter Fahrzeughardware praktikabel bleibt. Für Nichtfachleute lautet die Kernaussage: Das System erlaubt es einem Fahrzeug mit nur einer Kamera, ein klareres 3D-Bild seiner Fahrspuren unter vielfältigen und unordentlichen Bedingungen zu erstellen und kommt damit einen Schritt näher an sichereres und zuverlässigeres automatisiertes Fahren, ohne auf teure Tiefensensoren angewiesen zu sein.
Zitation: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Schlüsselwörter: 3D-Fahrspurerkennung, autonomes Fahren, monokulare Vision, Zustandsraummodelle, Computer Vision