Clear Sky Science · nl
Efficiënte monoculaire 3D-baanherkenning via Mamba-versterkt CM-3DLane-framework
Een scherper digitaal gevoel voor de weg
Op de rijstrook blijven is iets wat de meeste bestuurders automatisch doen. Voor zelfrijdende auto’s is het echter een complex raadsel om te achterhalen waar de rijstroken zich in drie dimensies bevinden. Deze studie introduceert CM-3DLane, een nieuw computer vision-systeem waarmee een auto met slechts één frontcamera de vorm van rijstroken in 3D nauwkeuriger en efficiënter kan aflezen, ook op heuvels, bochten en bij slecht weer.
Waarom rijstroken in 3D echt belangrijk zijn
De meeste rijhulpsystemen behandelen baanherkenning tegenwoordig als een plat, tweedimensionaal probleem: ze markeren rijstroken in de cameraweergave of op een vogelperspectiefkaart van de weg. Dat is vaak voldoende voor eenvoudige snelwegritten, maar faalt op steile heuvels, opritten en complexe kruisingen. Een plat model kan niet volledig beschrijven hoe ver een rijstrooklijn weg ligt, hoe deze stijgt of daalt, of hoe hij in de ruimte buigt. Drie-dimensionale baanherkenning biedt rijkere ruimtelijke informatie, wat helpt bij het plannen van vloeiende trajecten, het behouden van veilige afstanden en het nemen van betere beslissingen bij hoge snelheid.
Beperkingen van huidige cameramethoden
Bestaande camera-gebaseerde systemen werken meestal op één van twee manieren. Veelal wordt eerst de cameravoorstelling vervormd naar een vogelperspectiefprojectie met de aanname van een vlakke weg, waarna die 2D-lijnen weer naar 3D worden teruggebracht. Deze snelwegoplossing faalt wanneer de weg hellingen of hobbels heeft en vervormt ook voertuigen en andere objecten die op het wegdek staan. Andere recente methoden slaan het vogelperspectief over en modelleren lijnen direct als 3D-curven in de ruimte. Hoewel in principe nauwkeuriger, worstelen deze benaderingen omdat rijstrookmarkeringen dun, vaag en vaak onderbroken zijn, waardoor het lastig is hun verre stukken met standaard neurale netwerken te verbinden zonder enorme rekenkracht te gebruiken.
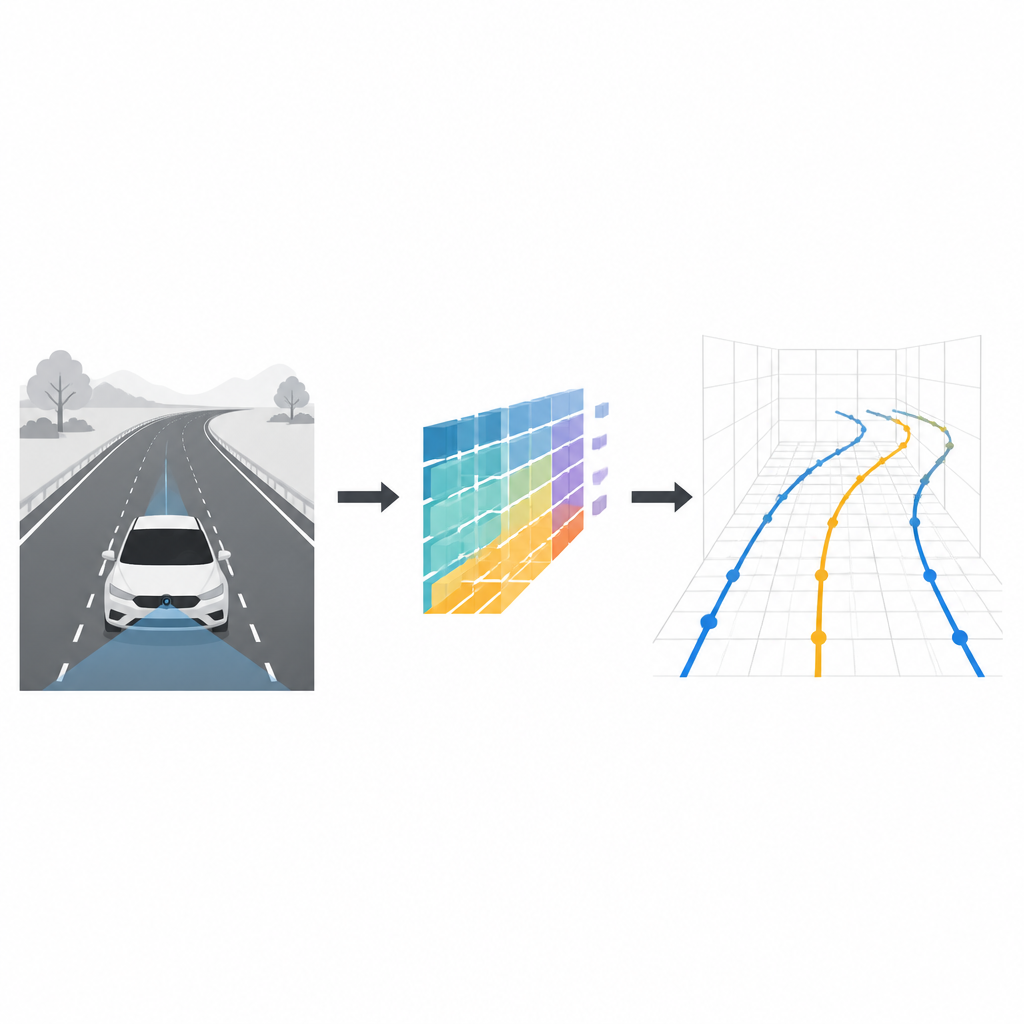
Een slimmere manier om rijstroken met één camera te lezen
Het CM-3DLane-framework streeft ernaar zowel fijne details als de grote-beeldstructuur van rijstroken vast te leggen, terwijl het licht genoeg blijft voor realtime gebruik in een auto. Het begint met een conventioneel beeldnetwerk dat kenmerken op meerdere schalen uit de frontale cameravoorstelling extraheert, variërend van grove omtrekken tot fijne texturen. Een Cross-Scale Attention Fusion-module leert vervolgens hoe deze schalen te mengen, zodat zowel verre, smalle stroken als nabijgelegen, brede stroken goed worden afgehandeld en verwarrende achtergrondtexturen worden onderdrukt. Dit helpt het systeem zich te concentreren op echte verfmarkeringen in plaats van schaduwen, scheuren of wegmarkeringen die er vergelijkbaar uitzien.
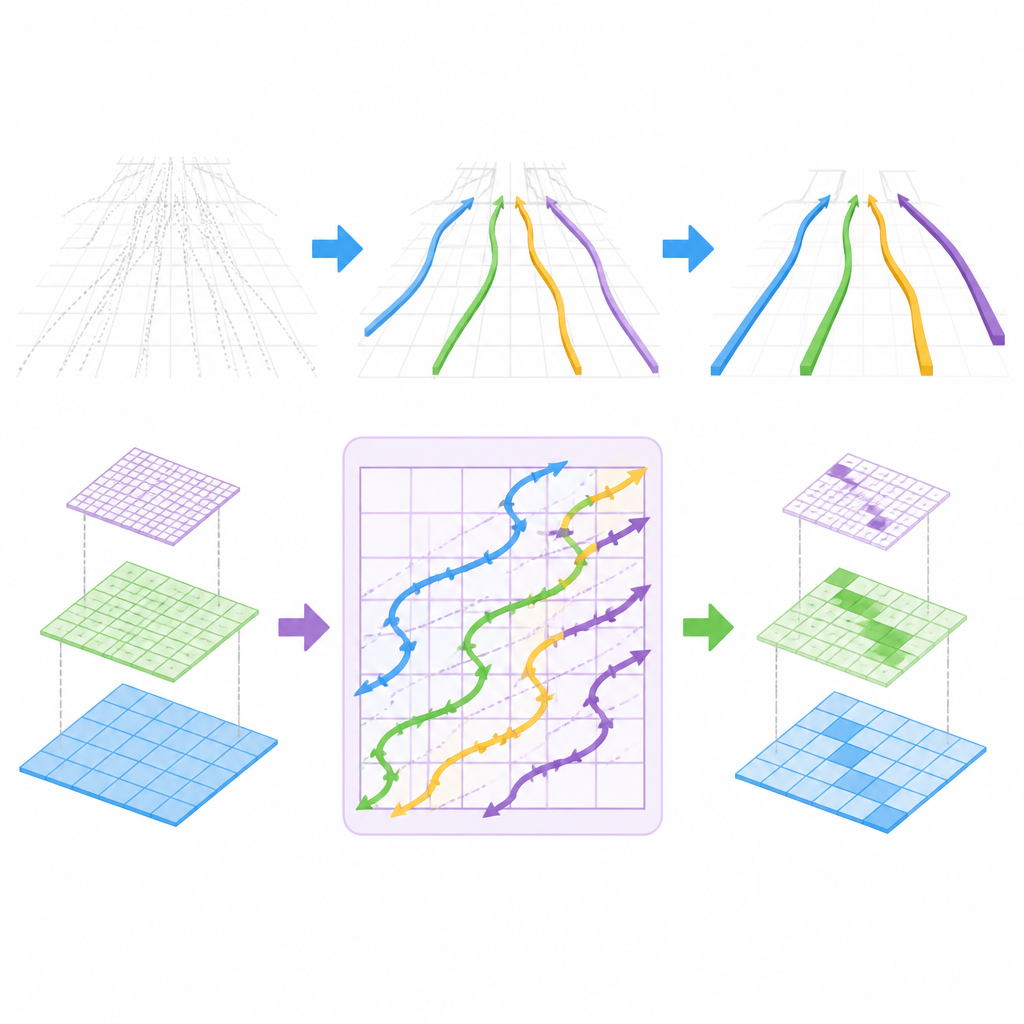
Rijstrookcurven volgen als een scanner
De kerninnovatie zit in hoe CM-3DLane lange-afstandsstructuur van rijstroken modelleert. De auteurs passen een recente familie modellen toe, bekend als state space-modellen, oorspronkelijk ontworpen voor snelle sequentieverwerking, binnen een Lane-Aware Mamba-blok. In plaats van afbeeldingspixels regel voor regel te lezen, scant dit blok kenmerken langs speciale slingerende diagonaalpaden die beter natuurlijke rijstrookcurven volgen naarmate ze in de verte verdwijnen. Daarmee naait het verspreide aanwijzingen voor rijstroken samen over grote delen van de scène, terwijl de berekening laag genoeg blijft voor realtime werking.
Alleen de meest bruikbare baan-kandidaten behouden
Een andere uitdaging is dat het systeem veel mogelijke 3D-curven moet overwegen en beslissen welke werkelijk overeenkomen met rijstroken. CM-3DLane introduceert een Refined Anchor Dynamic Ranking-module die deze kandidaatcurven scoort met behulp van een eenvoudige hulkaart van waarschijnlijke baanposities en hun lokale uiterlijk. Vervolgens behoudt het alleen de meest veelbelovende kandidaten, waardoor zowel verwarring als rekenbelasting afneemt. Deze selectie stap wordt gestuurd door eenvoudige geometrische regels die vloeiende, consistente baanshapes verkiezen boven gekartelde of onwaarschijnlijke vormen.
Wat de resultaten betekenen voor toekomstige auto’s
Getest op twee veeleisende benchmarks, waaronder een grote real-world dataset opgebouwd uit stedelijke en snelwegscènes, bereikt CM-3DLane hogere nauwkeurigheid dan eerdere methoden terwijl het tot tientallen frames per seconde draait op één grafische kaart en praktisch blijft zelfs op ingebedde autohardware. Voor niet-specialisten is de kernboodschap dat het systeem een auto met slechts één camera in staat stelt een helderder 3D-beeld van zijn rijstroken op te bouwen onder uiteenlopende en rommelige omstandigheden, en daarmee een stap dichterbij veiliger en betrouwbaarder geautomatiseerd rijden zonder te vertrouwen op dure dieptesensoren.
Bronvermelding: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Trefwoorden: 3D-baanherkenning, autonoom rijden, monoculaire visie, state space-modellen, computer vision