Clear Sky Science · pl
Wydajne jednosoczewkowe wykrywanie pasów 3D za pomocą ramy CM-3DLane wzmocnionej przez Mamba
Ostre cyfrowe wyczucie drogi
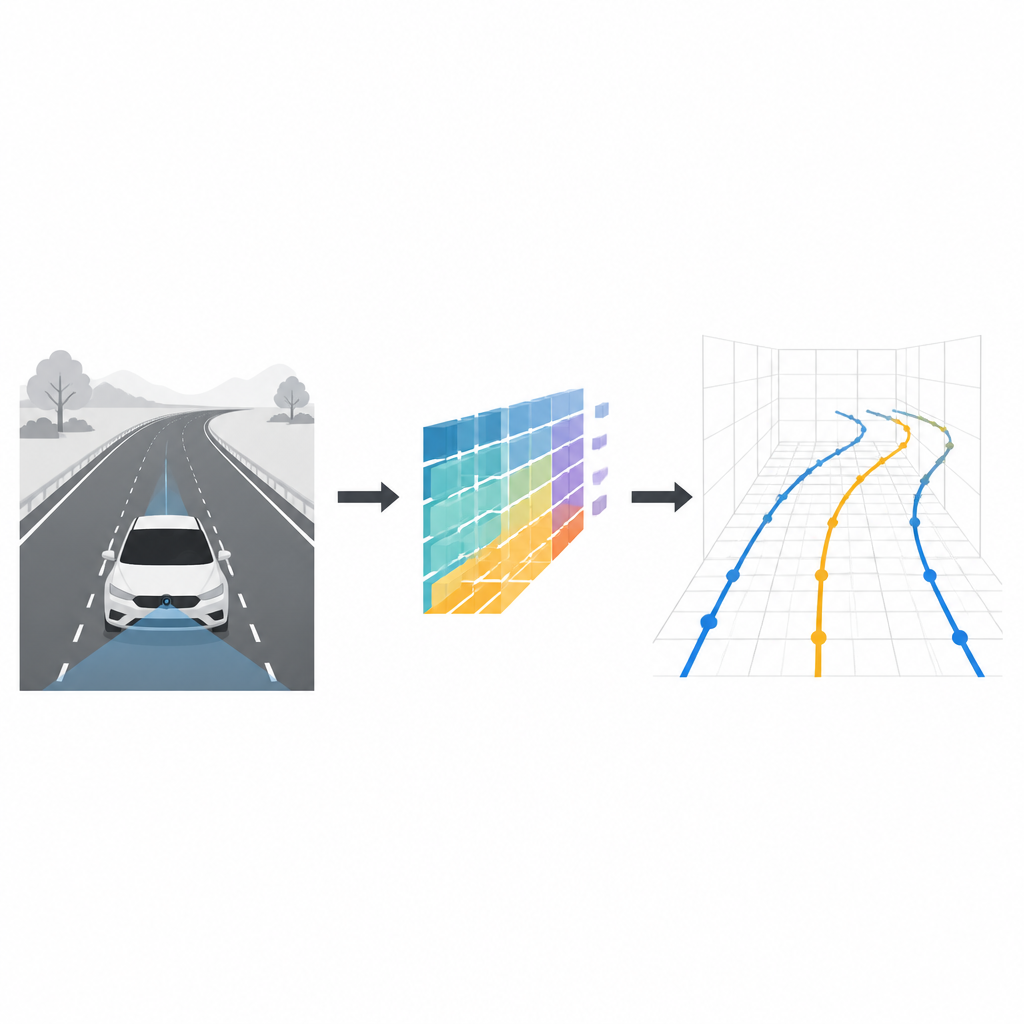
Utrzymanie się bezpiecznie w pasie to czynność, którą większość kierowców wykonuje automatycznie. Dla samochodów autonomicznych jednak zrozumienie, gdzie biegną oznaczenia pasów w trzech wymiarach, to trudna zagadka. W tym badaniu wprowadzono CM-3DLane — nowy system wizyjny, który pozwala pojazdowi wyposażonemu jedynie w pojedynczą kamerę przednią odczytywać kształt pasów w 3D dokładniej i wydajniej, nawet na wzgórzach, zakrętach i w trudnych warunkach pogodowych.
Dlaczego pasy w 3D mają znaczenie
Większość systemów wspomagania kierowcy dziś traktuje wykrywanie pasów jako problem płaski, dwuwymiarowy: zaznaczają pasy na obrazie z kamery lub na mapie z lotu ptaka. To często wystarcza do prostego poruszania się po autostradzie, ale zawodzi na stromych wzniesieniach, zjazdach i złożonych skrzyżowaniach. Model płaski nie potrafi w pełni opisać, jak daleko znajduje się linia pasa, jak się podnosi czy opada, ani jak krzywi się w przestrzeni. Wykrywanie pasów w trzech wymiarach dostarcza bogatszych informacji przestrzennych, co pomaga planować płynne trajektorie, utrzymywać bezpieczne odstępy i podejmować lepsze decyzje przy dużych prędkościach.
Ograniczenia obecnych metod kamerowych
Istniejące systemy oparte na kamerze zwykle działają na jeden z dwóch sposobów. Wiele z nich najpierw przekształca obraz kamerowy do rzutowania z lotu ptaka, używając prostego założenia płaskiej drogi, a potem „podnosi” te pasy 2D z powrotem do 3D. To obejście zawodzi, gdy droga jest nachylona lub ma wypukłości, a także zniekształca pojazdy i inne obiekty leżące na powierzchni drogi. Inne, nowsze metody pomijają widok z lotu ptaka i modelują pasy bezpośrednio jako krzywe 3D zakotwiczone w przestrzeni. Choć w zasadzie bardziej dokładne, podejścia te mają problem z tym, że oznaczenia pasów są cienkie, słabe i często przerwane, co utrudnia łączenie ich odległych fragmentów przy użyciu standardowych sieci neuronowych bez ogromnego zapotrzebowania na moc obliczeniową.
Bardziej inteligentny sposób odczytu pasów z jednej kamery
Rama CM-3DLane ma na celu uchwycenie zarówno drobnych szczegółów, jak i ogólnej struktury pasów, pozostając jednocześnie na tyle lekką, by działać w czasie rzeczywistym w samochodzie. Zaczyna od konwencjonalnej sieci obrazu, która wydobywa cechy na kilku skalach z widoku przedniej kamery — od zgrubnych zarysów po drobne tekstury. Moduł Cross-Scale Attention Fusion uczy się następnie, jak złączyć te skale, tak aby zarówno odległe, wąskie pasy, jak i bliskie, szerokie były dobrze obsługiwane, a mylące tekstury tła były tłumione. Pomaga to systemowi skupić się na prawdziwym oznakowaniu pasa, a nie na cieniu, pęknięciach czy oznaczeniach drogowych, które wyglądają podobnie.
Śledzenie krzywizn pasów jak skaner
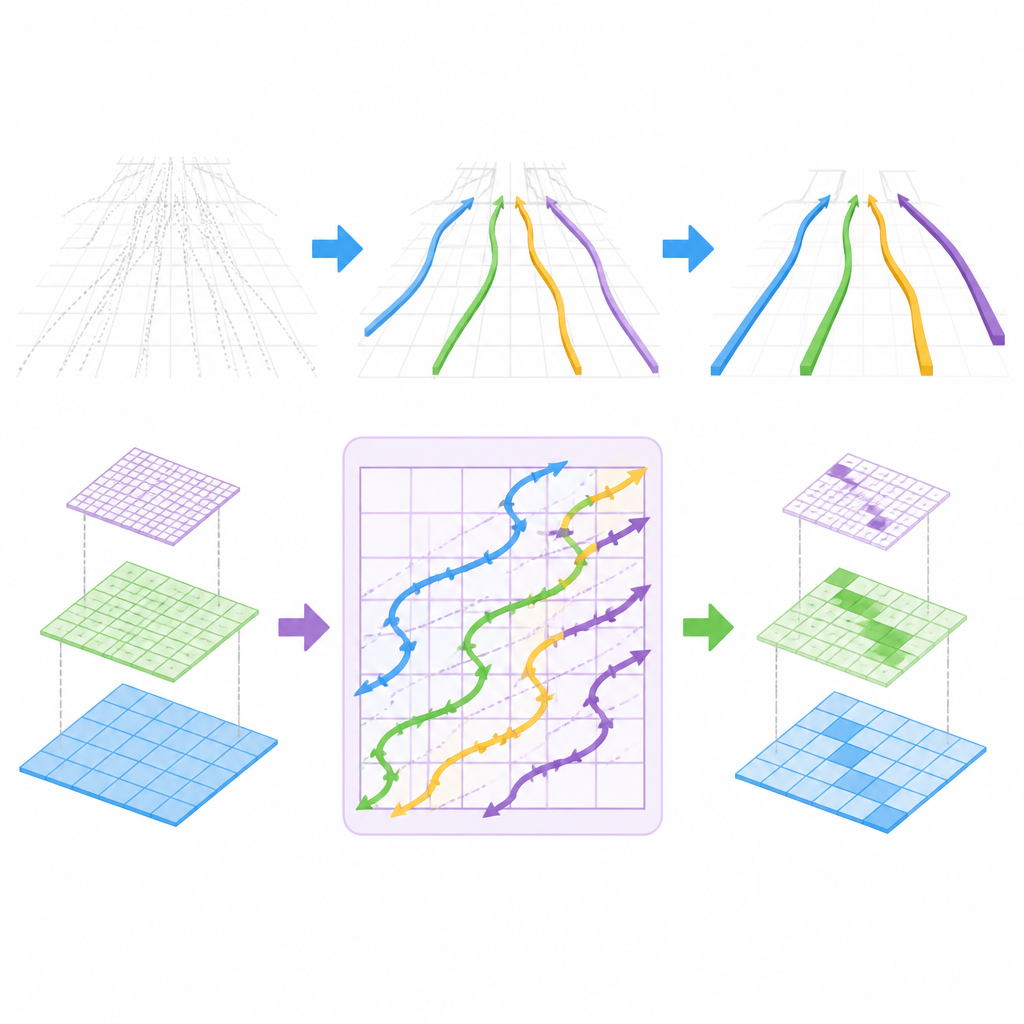
Kluczowa innowacja polega na sposobie, w jaki CM-3DLane modeluje długozasięgową strukturę pasów. Autorzy adaptują ostatnią rodzinę modeli znanych jako modele stanu (state space models), pierwotnie zaprojektowanych do szybkiego przetwarzania sekwencji, w blok Lane-Aware Mamba. Zamiast czytać piksele obrazu wiersz po wierszu, ten blok skanuje cechy wzdłuż specjalnych wijących się ścieżek diagonalnych, które lepiej podążają za naturalnymi krzywiznami pasów zanurzającymi się w odległość. W ten sposób łączy rozproszone wskazówki dotyczące pasa na dużych obszarach sceny, przy jednoczesnym utrzymaniu niskiego zużycia obliczeń, wystarczającego do pracy w czasie rzeczywistym.
Zachowywanie tylko najbardziej użytecznych kandydatów na pas
Kolejnym wyzwaniem jest to, że system musi rozważyć wiele możliwych krzywych 3D i zdecydować, które z nich naprawdę odpowiadają pasom. CM-3DLane wprowadza moduł Refined Anchor Dynamic Ranking, który ocenia te kandydackie krzywe za pomocą prostej pomocniczej mapy prawdopodobnych pozycji pasów i ich lokalnego wyglądu. Następnie zachowuje tylko najbardziej obiecujące kandydatury, zmniejszając zarówno zamieszanie, jak i obciążenie obliczeniowe. Ten etap selekcji jest prowadzony przez proste reguły geometryczne, które preferują gładkie, spójne kształty pasów zamiast postrzępionych czy nieprawdopodobnych.
Co oznaczają wyniki dla przyszłych samochodów
Testowany na dwóch wymagających benchmarkach, w tym na dużym zbiorze rzeczywistych danych pochodzących ze scen miejskich i autostradowych, CM-3DLane osiąga wyższą dokładność niż poprzednie metody, działając przy tym z prędkością do kilkudziesięciu klatek na sekundę na pojedynczej karcie graficznej i pozostając praktyczny nawet na wbudowanym sprzęcie samochodowym. Dla niespecjalistów główna myśl jest taka, że system pozwala pojazdowi wyposażonemu tylko w jedną kamerę zbudować jaśniejszy obraz 3D swoich pasów w zróżnicowanych i chaotycznych warunkach, przybliżając bezpieczniejszą i bardziej niezawodną jazdę zautomatyzowaną bez polegania na drogich czujnikach głębokości.
Cytowanie: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Słowa kluczowe: wykrywanie pasów 3D, jazda autonomiczna, wizja monocularna, modele stanu, widzenie komputerowe