Clear Sky Science · sv
Effektiv monokulär 3D-filupptäckt via Mamba-förstärkt CM-3DLane-ramverk
Skarpare digital vägkänsla
Att hålla sig säkert i sin fil är något de flesta förare gör utan att tänka. För självkörande bilar är det däremot en krävande pusselbit att avgöra hur filmarkeringar löper i tre dimensioner. Denna studie introducerar CM-3DLane, ett nytt datorseendesystem som låter en bil med endast en frontmonterad kamera läsa av filernas form i 3D mer exakt och effektivt, även i backar, kurvor och dåligt väder.
Varför filer i 3D verkligen spelar roll
De flesta förarassistanssystem i dag behandlar filupptäckt som ett plant, tvådimensionellt problem: de markerar filer i kamerabilden eller på en vy uppifrån av vägen. Det räcker ofta för enkel motorvägskörning men fallerar i branta backar, ramper och komplexa korsningar. En platt modell kan inte fullt beskriva hur långt bort en fil är, hur den stiger eller sjunker, eller hur den böjer sig i rummet. Tredimensionell filupptäckt erbjuder rikare rumslig information, vilket hjälper planerare att skapa mjukare banor, hålla säkra avstånd och fatta bättre beslut vid hög fart.
Begränsningar hos nuvarande kamerametoder
Nuvarande kamerabaserade system fungerar vanligtvis på ett av två sätt. Många transformerar först kamerabilden till en vy uppifrån med en enkel antagning om plan väg, och lyfter sedan tillbaka dessa 2D-filer till 3D. Denna genväg misslyckas när vägen sluttar eller har ojämnheter och förvränger dessutom fordon och andra objekt som står på vägbanan. Andra nyare metoder hoppar över vy uppifrån och modellerar i stället filer direkt som 3D-kurvor förankrade i rummet. Fastän de är mer exakta i princip, kämpar dessa tillvägagångssätt eftersom filmarkeringar är tunna, svaga och ofta avbrutna, vilket gör det svårt att knyta ihop avlägsna fragment med standardneuronät utan enorm beräkningskostnad.
Ett smartare sätt att läsa filer från en kamera
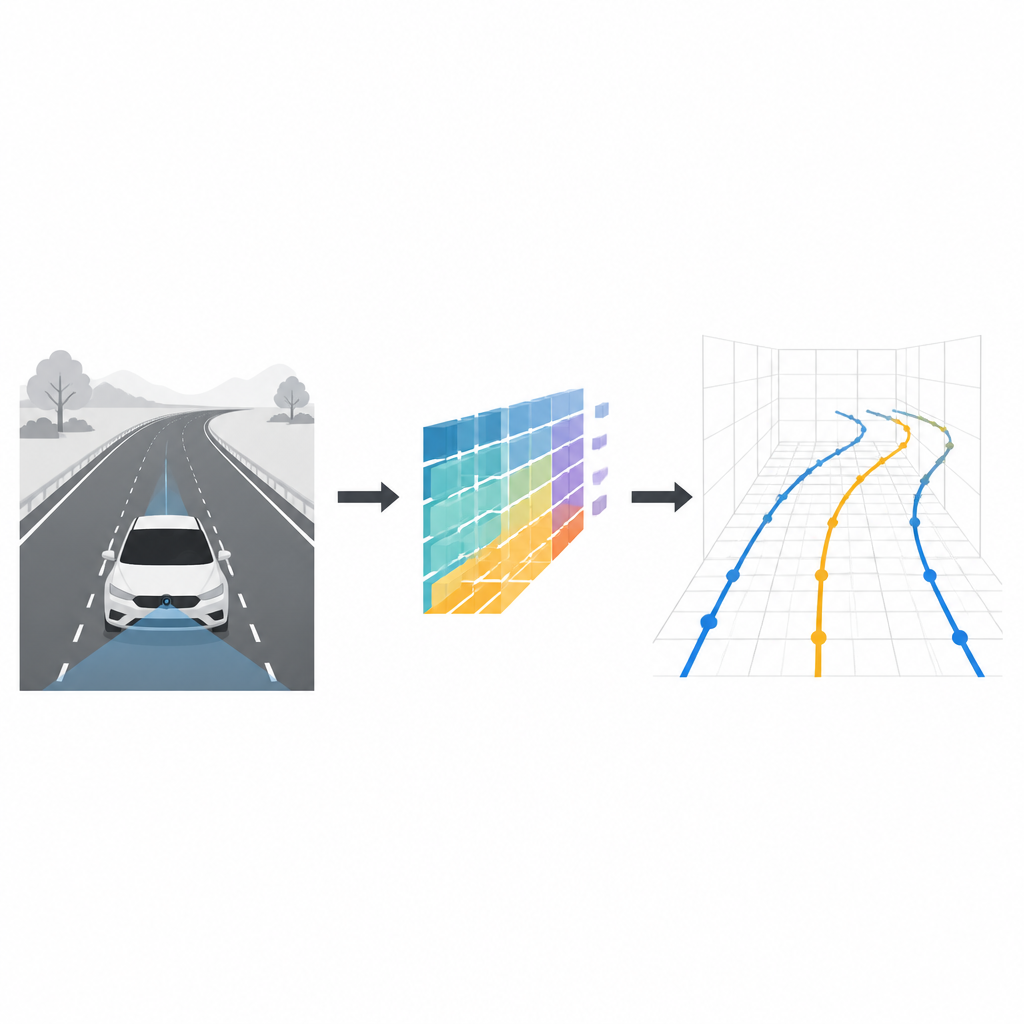
CM-3DLane-ramverket syftar till att fånga både finkorniga detaljer och helhetsstrukturen hos filer samtidigt som det förblir tillräckligt lättviktigt för realtidsbruk i en bil. Det börjar med ett konventionellt bildnät som extraherar funktioner i flera skalor från frontkamerans vy, från grova konturer till fina texturer. En Cross-Scale Attention Fusion-modul lär sig sedan hur dessa skalor ska blandas, så att avlägsna, smala filer och närliggande, breda filer hanteras väl och förvirrande bakgrundstexturer undertrycks. Detta hjälper systemet att fokusera på verklig filmålning snarare än skuggor, sprickor eller vägmarkeringar som ser liknande ut.
Följa filkurvor som en skanner
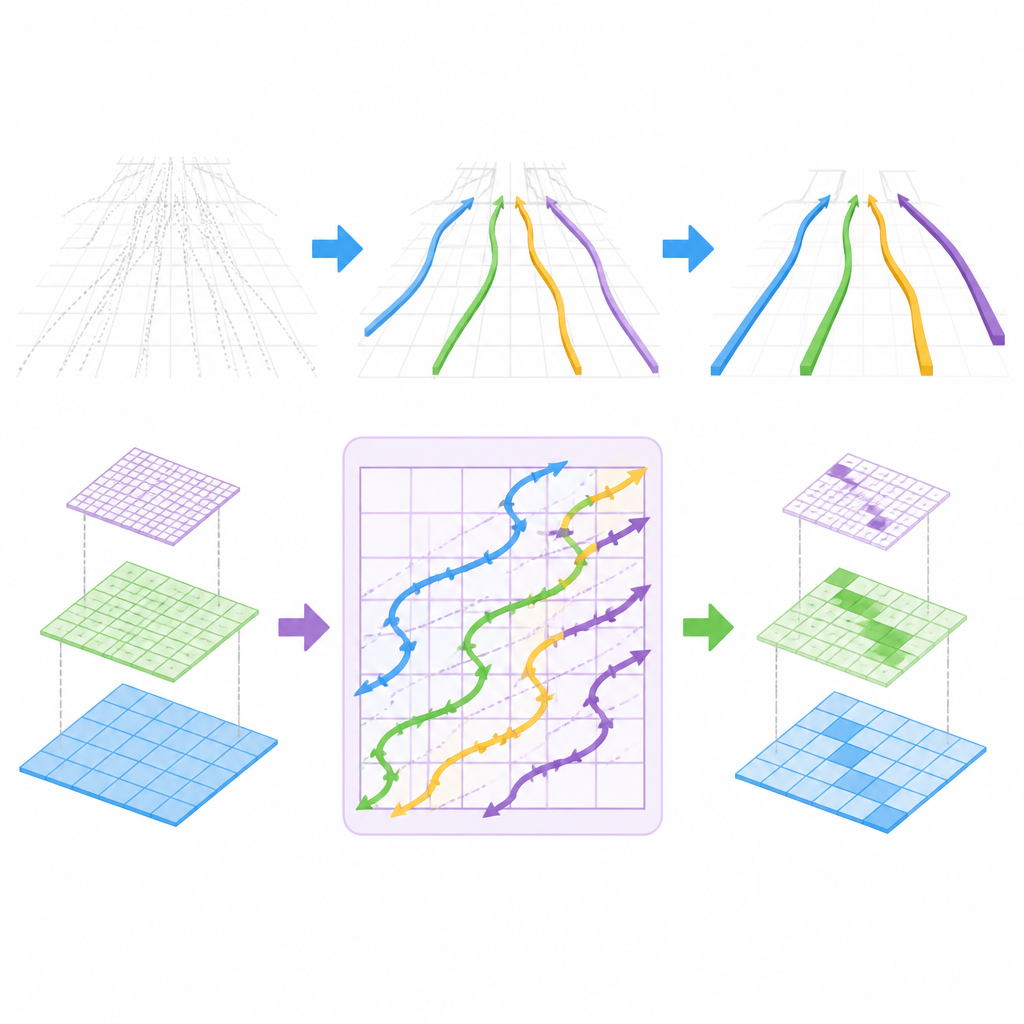
Nyckelinnovationen ligger i hur CM-3DLane modellerar långdistansstruktur hos filer. Författarna anpassar en nyare familj av modeller kända som tillståndsrumsmådelser, ursprungligen designade för snabb sekvensbearbetning, till en Lane-Aware Mamba-block. I stället för att läsa bildpixlar rad för rad skannar detta block funktioner längs särskilda slingrande diagonala vägar som bättre följer naturliga filkurvor när de försvinner i fjärran. Genom detta sys spridda filspår ihop över stora områden av scenen samtidigt som beräkningen hålls låg nog för realtidsdrift.
Bara de mest användbara filkandidaterna behålls
En annan utmaning är att systemet måste överväga många möjliga 3D-kurvor och avgöra vilka som verkligen motsvarar filer. CM-3DLane introducerar en Refined Anchor Dynamic Ranking-modul som poängsätter dessa kandidatkurvor med hjälp av en enkel hjälpkarta över sannolika filpositioner och deras lokala utseende. Den behåller sedan endast de mest lovande kandidaterna, vilket minskar både förvirring och beräkning. Detta urvalssteg styrs av enkla geometriska regler som föredrar mjuka, konsekventa filformer framför taggiga eller osannolika sådana.
Vad resultaten innebär för framtida bilar
Testat på två krävande benchmarks, inklusive en stor verklig datamängd byggd från stadsoch motorvägsscener, uppnår CM-3DLane högre noggrannhet än tidigare metoder samtidigt som det körs i upp till tiotals bilder per sekund på ett enda grafikkort och förblir praktiskt även på inbyggd bilhårdvara. För icke-specialister är huvudbudskapet att systemet låter en bil med bara en kamera bygga en klarare 3D-bild av sina filer i varierande och stökiga förhållanden, vilket tar ett steg närmare säkrare och mer tillförlitlig automatiserad körning utan att förlita sig på dyra djupgivare.
Citering: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Nyckelord: 3D-filupptäckt, autonom körning, monokulär vision, tillståndsrumssmodeller, datorseende