Clear Sky Science · it
Rilevamento monoculare efficiente delle corsie 3D tramite il framework CM-3DLane potenziato con Mamba
Senso stradale digitale più nitido
Mantenersi nella corsia in modo sicuro è qualcosa che la maggior parte dei guidatori fa senza pensarci. Per le auto a guida autonoma, però, capire dove scorrono le strisce della corsia in tre dimensioni è un problema complesso. Questo studio introduce CM-3DLane, un nuovo sistema di visione artificiale che permette a un’auto con una sola telecamera frontale di leggere la forma delle corsie in 3D in modo più accurato ed efficiente, anche su colline, curve e in condizioni meteorologiche avverse.
Perché le corsie in 3D contano davvero
La maggior parte dei sistemi di assistenza alla guida oggi tratta il rilevamento delle corsie come un problema bidimensionale: marcano le corsie nell’immagine della telecamera o su una mappa top-down della strada. Questo è spesso sufficiente per una guida autostradale semplice, ma fallisce su pendii ripidi, rampe e nodi stradali complessi. Un modello piatto non può descrivere completamente quanto è lontana una linea di corsia, come sale o scende o come curva nello spazio. Il rilevamento delle corsie in tre dimensioni offre dettagli spaziali più ricchi, che aiutano a pianificare traiettorie più fluide, mantenere distanze di sicurezza e prendere decisioni migliori ad alta velocità.
Limiti dei metodi attuali basati su telecamera
I sistemi esistenti basati su telecamera di solito operano in uno di due modi. Molti prima trasformano la vista della telecamera in una proiezione top-down usando l’assunzione di una strada piana, quindi rialzano quelle corsie 2D in 3D. Questo stratagemma fallisce quando la strada è in pendenza o ha dossi e distorce anche veicoli e altri oggetti che stanno sulla superficie stradale. Altri metodi recenti saltano la vista top-down e modellano le corsie direttamente come curve 3D ancorate nello spazio. Pur essendo più accurati in linea di principio, questi approcci faticano perché le marcature delle corsie sono sottili, tenui e spesso interrotte, rendendo difficile collegare i loro pezzi distanti con le reti neurali standard senza consumare enorme potenza di calcolo.
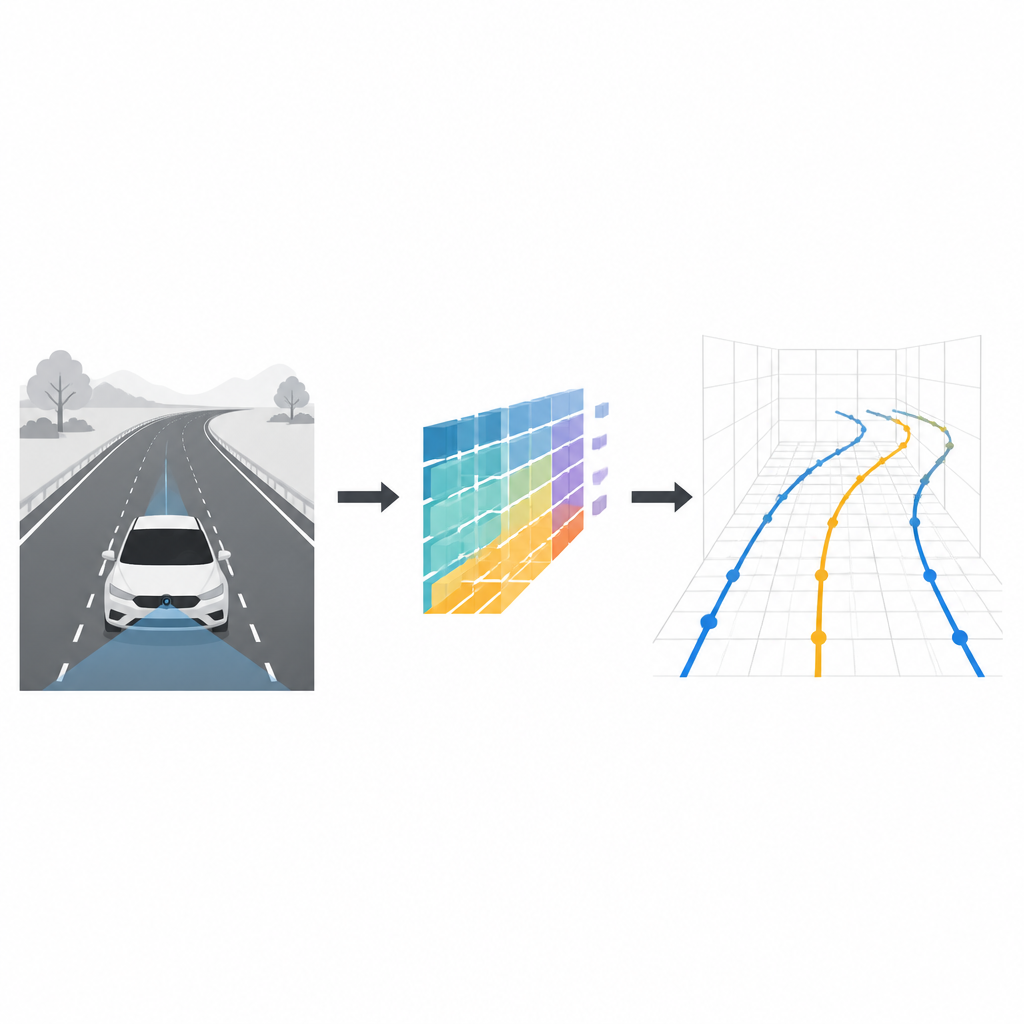
Un modo più intelligente di leggere le corsie con una sola telecamera
Il framework CM-3DLane punta a catturare sia i dettagli fini sia la struttura d’insieme delle corsie mantenendosi abbastanza leggero per l’uso in tempo reale a bordo di un’auto. Parte da una rete convenzionale per immagini che estrae feature a più scale dalla vista frontale della telecamera, da contorni grossolani a texture fini. Un modulo Cross-Scale Attention Fusion impara poi come fondere queste scale, in modo che corsie distanti e strette e corsie vicine e larghe siano gestite entrambe bene, mentre le texture di sfondo fuorvianti vengono soppresse. Questo aiuta il sistema a concentrarsi sulla vernice reale delle corsie piuttosto che su ombre, crepe o segnaletica stradale simile.
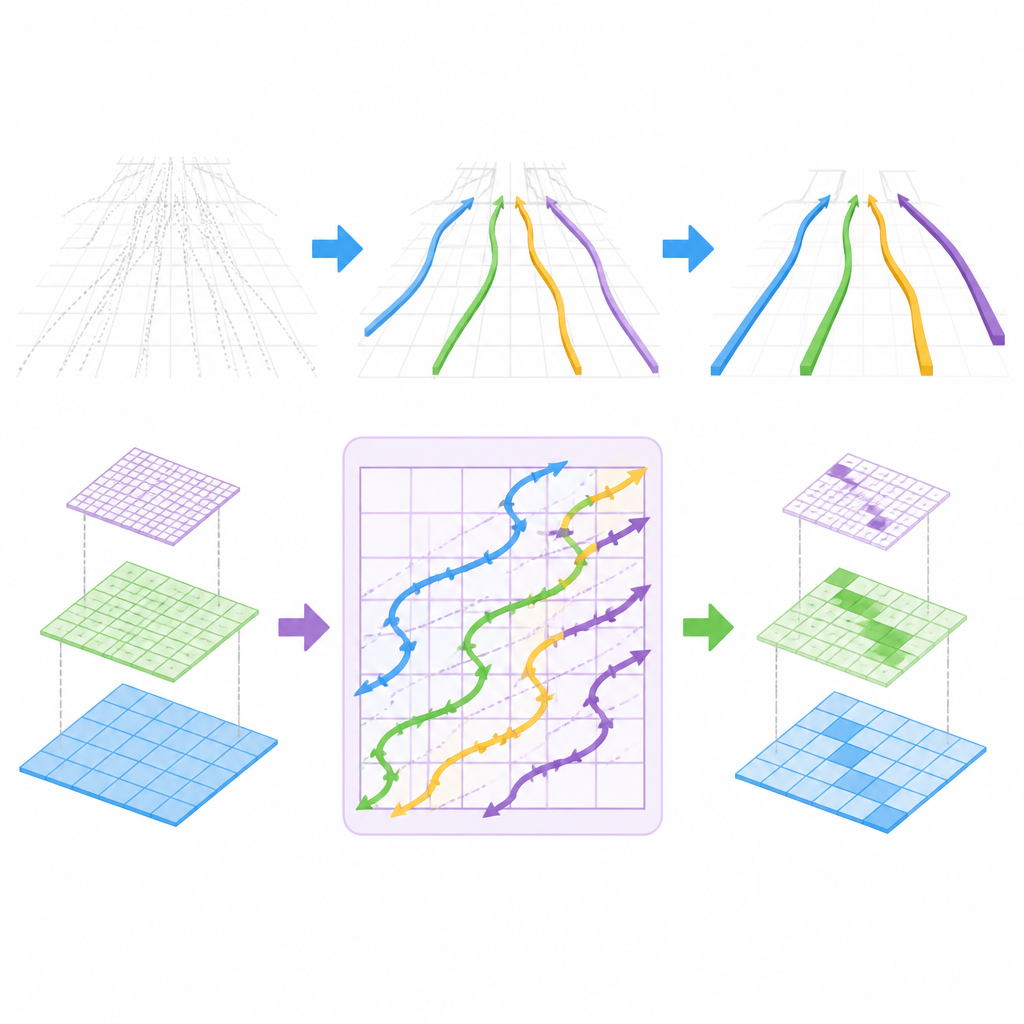
Seguire le curve delle corsie come uno scanner
L’innovazione chiave risiede nel modo in cui CM-3DLane modella la struttura a lunga distanza delle corsie. Gli autori adattano una recente famiglia di modelli nota come state space models, originariamente progettata per l’elaborazione rapida di sequenze, in un blocco Lane-Aware Mamba. Invece di leggere i pixel dell’immagine riga per riga, questo blocco scansiona le feature lungo percorsi diagonali a serpentina speciali che seguono meglio le curve naturali delle corsie man mano che si allontanano. Così facendo, ricompone indizi di corsia sparsi su ampie aree della scena, mantenendo allo stesso tempo il calcolo sufficientemente contenuto per l’operatività in tempo reale.
Mantenere solo i candidati di corsia più utili
Un’altra sfida è che il sistema deve considerare molte possibili curve 3D e decidere quali corrispondono davvero a corsie. CM-3DLane introduce un modulo Refined Anchor Dynamic Ranking che valuta questi candidati usando una semplice mappa ausiliaria delle probabili posizioni delle corsie e del loro aspetto locale. Mantiene poi solo i candidati più promettenti, riducendo sia la confusione sia il carico di calcolo. Questo passaggio di selezione è guidato da regole geometriche semplici che preferiscono forme di corsia lisce e coerenti rispetto a quelle frastagliate o implausibili.
Cosa significano i risultati per le auto del futuro
Testato su due benchmark impegnativi, inclusi ampi dataset reali costruiti da scene urbane e autostradali, CM-3DLane raggiunge un’accuratezza superiore rispetto ai metodi precedenti pur funzionando fino a decine di fotogrammi al secondo su una singola scheda grafica e rimanendo pratico anche su hardware embedded per auto. Per i non specialisti, il messaggio principale è che il sistema permette a un’auto con una sola telecamera di costruire un’immagine 3D più chiara delle sue corsie in condizioni varie e disordinate, avvicinandosi a una guida automatizzata più sicura e affidabile senza fare affidamento su costosi sensori di profondità.
Citazione: Yang, Y., Zhang, X. & Liu, Y. Efficient monocular 3D lane detection via Mamba-enhanced CM-3DLane framework. Sci Rep 16, 15074 (2026). https://doi.org/10.1038/s41598-026-44870-1
Parole chiave: rilevamento corsie 3D, guida autonoma, visione monoculare, modelli a spazio di stato, visione artificiale