Clear Sky Science · zh
用于割草、收集和精密播种的模块化四驱农业机器人:设计与基于仿真的评估
为日常绿色空间打造更聪明的机器
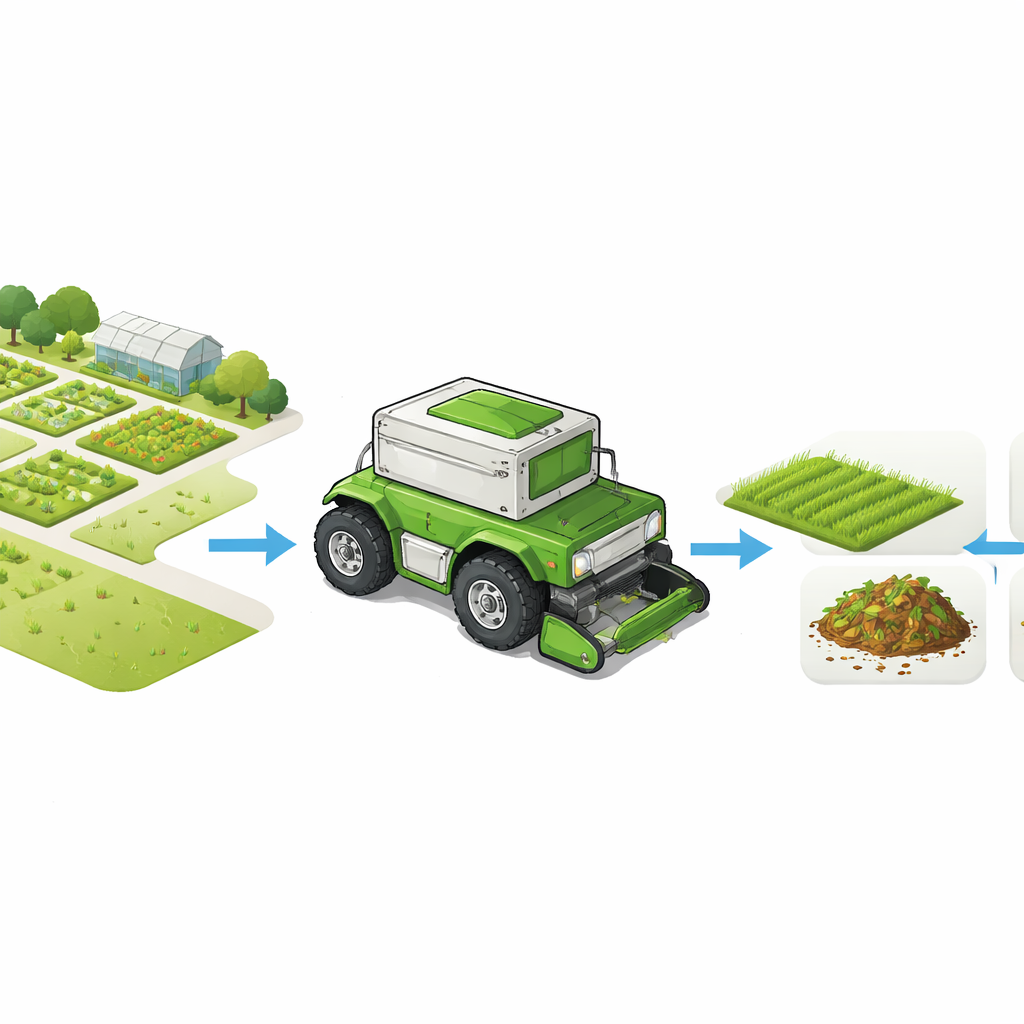
保持草坪、公园和小型农场整洁通常需要操作多台嘈杂且耗燃料的设备——一台割草机、一台集屑机、一台粉碎落叶的机器以及用于播种的设备。本文描述了一款紧凑的电动机器人,旨在将这些工作整合到一台模块化的自动驾驶装置中,面向校园、庄园和小规模农田。通过更换几个快拆附件,同一台四轮机器可以割草、收集并压碎植物残渣,然后返回按精确间距播种,且整个过程仅使用一组电池并能自主规划在田地上的行进路径。
一台机器人胜任多种户外任务
研究的核心是一台方正的四轮驱动机器人,左右轮对独立驱动,使其可以原地转向并在狭窄角落灵活机动。设计者将整机分为两层:坚固的下部平台用于容纳驱动电机、电子设备和大功率鼓风机,上部箱体则作为大型收集仓。在这一共享底盘上安装快拆工具头——用于活草的高扭矩割草器、用于干叶与轻质碎屑的粉碎器,以及后挂的播种拖车。透明侧板便于操作者进行内部检查与维护,且从一开始就将带护罩的刀片和保险杠等安全特性内置其中。
割草、收集与播种如何集成
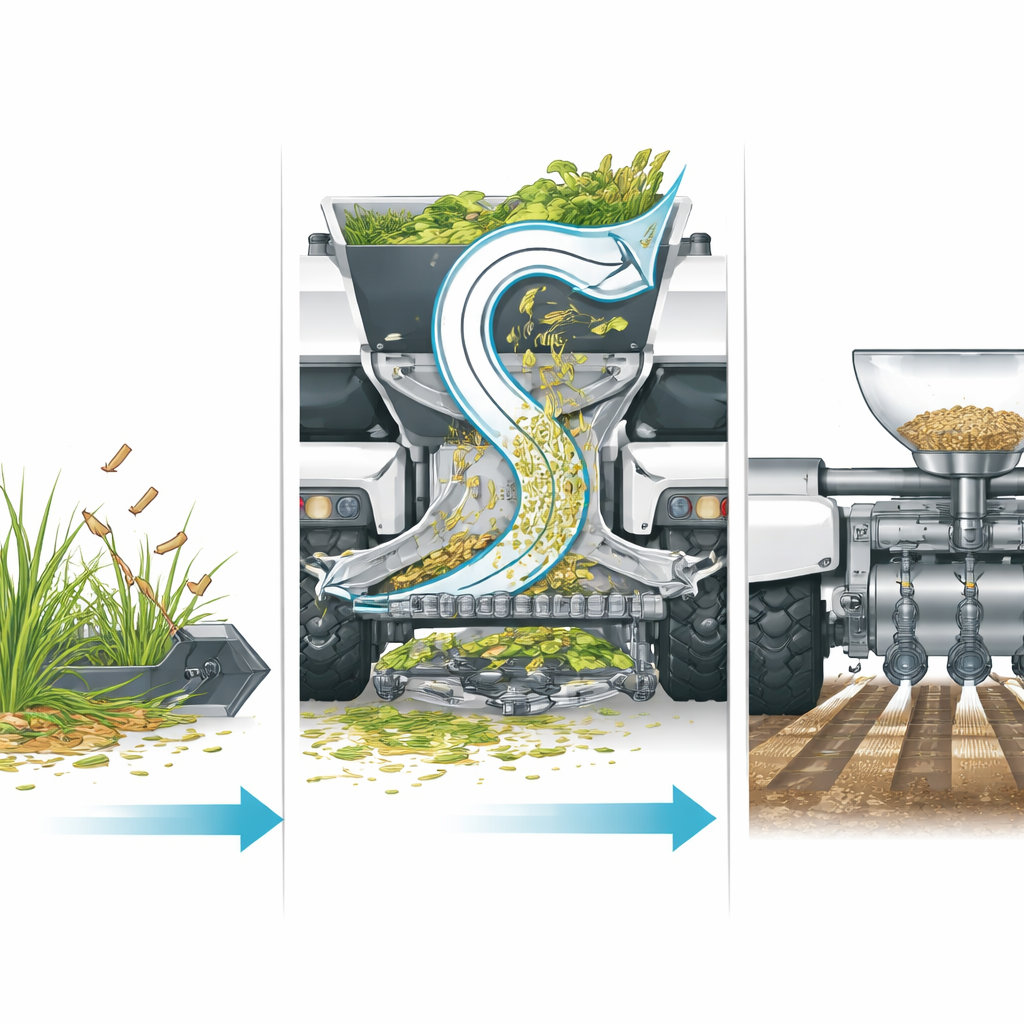
在割草作业中,机器前端的修剪器割断草茎,同时半圆形保险杠将石块和碎屑偏离刀片。S形气道和鼓风机随后将切下的草屑从地面吸起并送入上部收集舱,减少人工耙拾的需求。在干燥季节的清理中,修剪器可换成粉碎单元,将落叶和轻型垃圾切碎以便处理。需要播种时,小拖车连接到后部挂钩。种子由料斗进入带有均匀间隔凹槽的旋转鼓,再通过管道落入土壤中开好的浅沟,随后跟随的覆土片封闭沟槽。通过将鼓的转速与机器人行驶速度关联,系统即使在加速或减速时也能保持一致的种子间距。
教会机器人“看见”并规划工作
该平台被设计为自主运行,由传感器与车载决策软件协同引导。摄像头、激光扫描仪和运动传感器将数据馈入一个融合估计模块,该模块整合信号并将机器人的位置跟踪到仅几厘米的误差范围。在此之上,任务管理器在割草、粉碎和播种任务间做出选择,而路径规划器与运动控制器计算平滑路线与车轮速度。团队还探索了一种基于摄像头的草高估计方法,通过图像将草地分为非常短、短、中等或长的等级。此类信息可用于实时升降修剪器,避免不必要的深割,节省能量并保持草坪外观一致。
在仿真中测试路径、功耗与耐久性
作者并未立即制造硬件,而是进行了详尽的计算机仿真实验。他们估算了割草速率、收集效率和导航精度,并计算出一组24伏、50安时电池对各项任务的续航能力。模型表明,组合割草与吸集作业每次充电可运行约1.2小时,落叶粉碎约2小时,轻载播种约8小时。他们对矩形地块比较了三种覆盖模式——之字形、内向螺旋和同心圆,并表明只有之字形或称“犁田式”(boustrophedon)模式能可靠地覆盖矩形地块的每一部分而不留未割的角落。附加仿真研究了保险杠偏转石块的效果、坡地上的轮胎打滑量以及小石子通过护罩开口的可能性,结果显示损伤风险低且在约25度以内的坡度上具有可接受的牵引力。
验证车架与附件的强度
为确保机器人车体能承受真实使用,团队对钢制底座框架、较轻的铝制上部结构以及播种器组件进行了有限元分析——即数字应力测试。在代表性的静载荷下,计算得到的应力远低于材料的屈服极限,两个金属结构的安全系数均大于15。从实际角度看,这意味着该设计对割草、牵引和搬运过程中预计的日常力有着较大的冗余,为更重的附件或偶发碰撞和冲击留出充分余量。研究还概述了如何将收集到的草屑按常规配方转化为堆肥,将机器人场地维护与现场植物材料的简单循环利用相连。
迈向更清洁、模块化的庭院与农场维护
总体而言,论文主张一台具备可互换模块的电池驱动机器人可以替代在中小型户外场地用于割草、收集、粉碎和播种的多台专用设备。尽管所有结果均来自仿真,真实世界试验仍有待开展,但研究结果表明所提出的四轮平台在能效上有望表现良好、在选择合适路径时能实现完整覆盖、在典型坡度上保持稳定,并在承载时保持结构安全。通过将模块化机械设计与基础机器视觉和细致的能量预算相结合——并计划对收集的生物质进行堆肥处理——该工作指向了更清洁、更灵活且更可持续的草坪与小型农场养护方式。
引用: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
关键词: 自主农业机器人, 草坪与田地维护, 精密播种, 覆盖路径规划, 草屑堆肥化