Clear Sky Science · pl
Modułowy, napędzany na cztery koła robot rolniczy do koszenia, zbierania i precyzyjnego siewu: projekt i ocena oparta na symulacjach
Mądrzejsze maszyny dla codziennych terenów zielonych
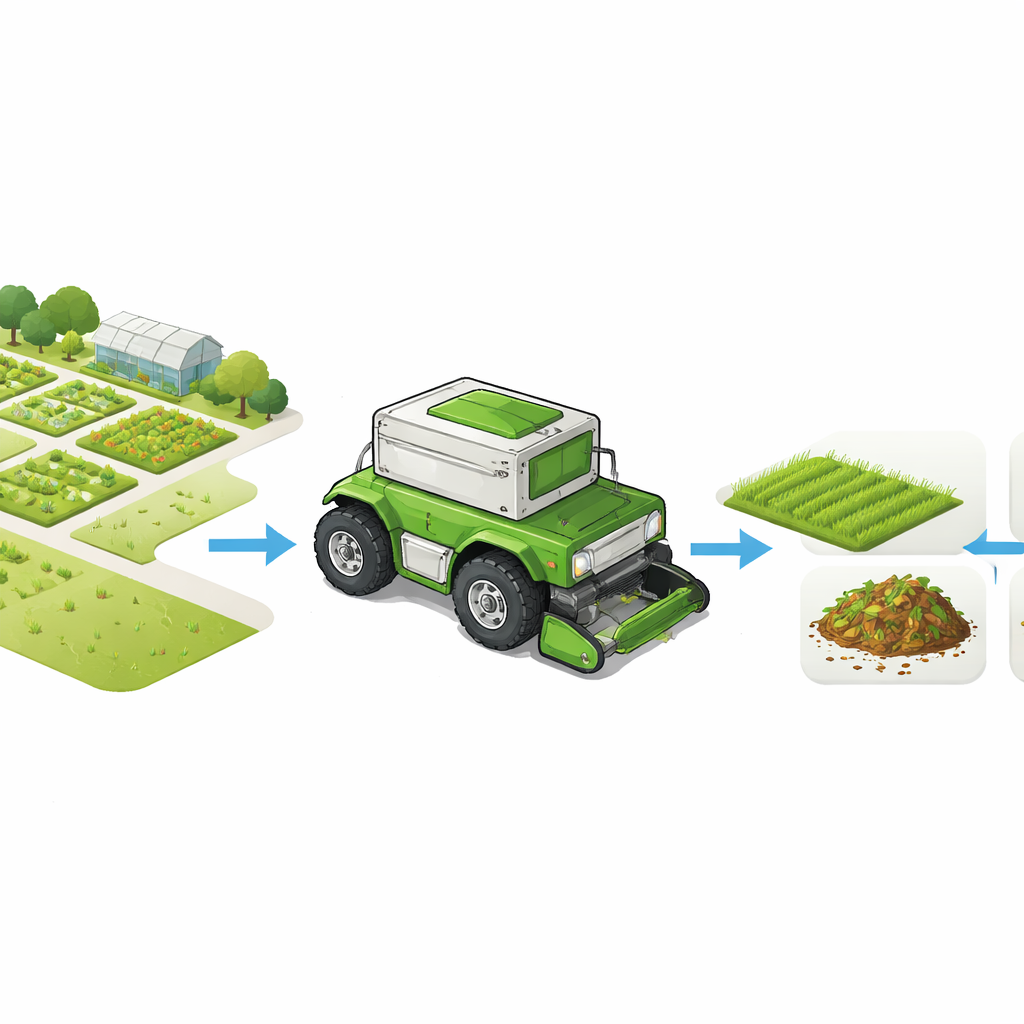
Utrzymanie trawników, parków i niewielkich gospodarstw w porządku zwykle oznacza korzystanie z kilku głośnych, paliwożernych urządzeń — jednego do koszenia, innego do zbierania skoszonej trawy, jeszcze innego do rozdrabniania liści i kolejnego do wysiewu. W artykule opisano kompaktowego, elektrycznego robota, który ma na celu połączenie tych prac w jedno modułowe, samojezdne urządzenie, zaprojektowane z myślą o kampusach, posiadłościach i małych działkach rolniczych. Dzięki kilku szybkozłączom ta sama czterokołowa maszyna może kosić trawę, zbierać i rozdrabniać odpady roślinne, a potem wrócić do wysiewu nasion z precyzyjnym rozstawem, wszystko zasilane z jednego akumulatora i planujące własną trasę po polu.
Pojedynczy robot do wielu zadań na zewnątrz
W centrum badania znajduje się kanciasty robot z napędem na cztery koła z niezależną kontrolą par lewej i prawej, co pozwala mu obracać się w miejscu i manewrować w ciasnych zakrętach. Projektanci podzielili maszynę na dwie nałożone na siebie jednostki: wytrzymały niższy pokład mieszczący silniki napędowe, elektronikę i wydajny dmuchawę oraz górną skrzynię pełniącą funkcję dużego zbiornika. Na wspólnym podwoziu montuje się szybkozłączne głowice narzędziowe — wysokoprędkościowy trymer do trawy na żywo, rozdrabniacz do suchych liści i lekkich odpadów oraz tylną przyczepkę do rozsiewania nasion. Przezroczyste boczne panele pozwalają operatorom na wzrokową inspekcję i konserwację, a elementy bezpieczeństwa, takie jak osłonięte ostrza i zderzaki, są uwzględnione od początku konstrukcji.
Jak łączy się koszenie, zbieranie i siew
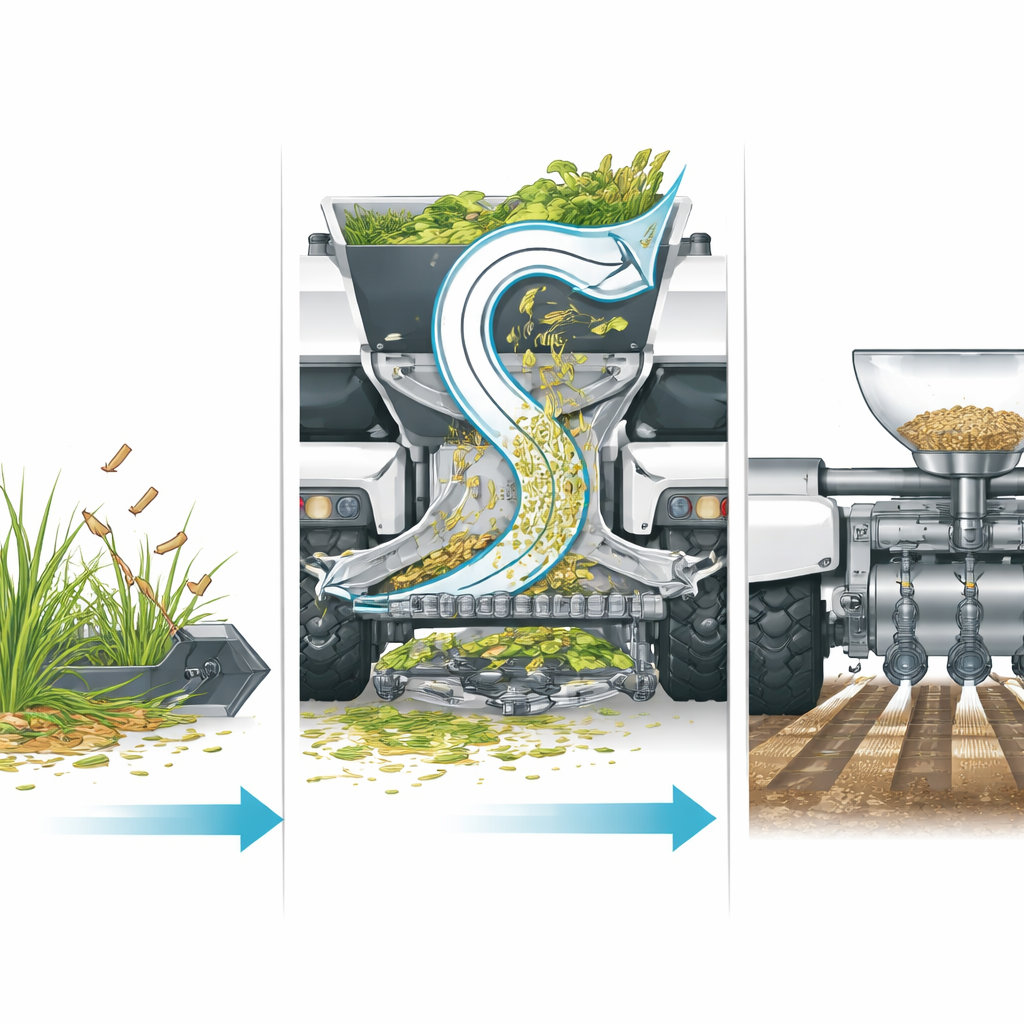
Podczas koszenia przedni trymer tnie trawę, a półokrągły zderzak odchyla kamienie i odpady z dala od ostrza. S-kształtny kanał powietrzny i dmuchawa zasysają następnie pocięte skoski z ziemi i podnoszą je do górnej komory zbiorczej, zmniejszając potrzebę ręcznego grabienia. Na suche sezony trymer można wymienić na jednostkę rozdrabniającą, która kruszy opadłe liście i lekkie śmieci, ułatwiając ich obsługę. Gdy nadchodzi czas siewu, mała przyczepka łączy się z tylnym zaczepem. Nasiona przepływają ze zbiornika do obracającego się bębna z równomiernie rozmieszczonymi wgłębieniami, następnie spadają rurkami do płytkich bruzd rozcinanych w glebie, po czym zamykająca klapka zasypuje bruzdę. Poprzez powiązanie prędkości obrotowej bębna z prędkością jazdy robota system utrzymuje stałe odstępy między nasionami nawet wtedy, gdy robot przyspiesza lub zwalnia.
Nauka widzenia i planowania pracy przez robota
Platforma zaprojektowana jest do pracy autonomicznej, prowadzonej przez kombinację czujników i oprogramowania decyzyjnego na pokładzie. Kamera, skaner laserowy i czujniki ruchu dostarczają danych do modułu estymacji, który łączy sygnały i śledzi pozycję robota z błędem sięgającym zaledwie kilku centymetrów. Na tej podstawie menedżer misji wybiera między zadaniami koszenia, rozdrabniania i siewu, podczas gdy planer tras i sterownik ruchu obliczają płynne trasy i prędkości kół. Zespół bada również metodę opartą na kamerze do oszacowania wysokości trawy ze zdjęć, klasyfikując fragmenty jako bardzo krótkie, krótkie, średnie lub długie. Informacje te mogą być wykorzystywane do podnoszenia lub opuszczania trymera w locie, co zapobiega niepotrzebnie głębokim cięciom i oszczędza energię, utrzymując przy tym jednolity wygląd trawnika.
Testowanie tras, zużycia energii i wytrzymałości w symulacji
Zamiast natychmiastowego budowania prototypu, autorzy przeprowadzili szczegółowy zestaw testów komputerowych. Oszacowali tempo koszenia, efektywność zbierania i dokładność nawigacji oraz obliczyli, jak długo akumulator 24 V, 50 Ah może zasilać poszczególne zadania. Ich modele sugerują, że łączone koszenie z odsysaniem może działać około 1,2 godziny na jednym ładowaniu, rozdrabnianie liści przez około 2 godziny, a lekki siew przez około 8 godzin. Porównali trzy wzory pokrycia prostokątnych pól — zygzak, spiralę do wewnątrz i koncentryczne okręgi — i wykazali, że tylko zygzak lub wzór „boustrophedon” niezawodnie pokrywa każdy fragment prostokątnej działki bez pozostawiania nieprzejechanych rogów. Dodatkowe symulacje badały, jak dobrze zderzak odchyla kamienie, ile poślizgu kół występuje na pochyłościach oraz jak prawdopodobne jest prześlizgnięcie się małych kamyków przez otwór osłony; wyniki wskazują niskie ryzyko uszkodzeń i akceptowalną trakcję na nachyleniach do około 25 stopni.
Sprawdzanie wytrzymałości ramy i osprzętu
Aby upewnić się, że korpus robota przetrwa eksploatację w rzeczywistych warunkach, zespół przeprowadził analizy metodą elementów skończonych — cyfrowe testy naprężeń — zarówno dla stalowej ramy podstawowej, jak i lżejszej aluminiowej górnej struktury oraz dla zespołu dozownika nasion. Pod reprezentatywnymi obciążeniami statycznymi obliczone naprężenia były tysiące razy niższe niż granice plastyczności materiałów, dając współczynniki bezpieczeństwa większe niż 15 dla obu konstrukcji metalowych. W praktyce oznacza to, że projekt jest znacznie przewymiarowany względem codziennych sił występujących przy koszeniu, holowaniu i obsłudze, pozostawiając znaczący zapas na cięższe osprzęty lub sporadyczne uderzenia i wstrząsy. Badanie szkicuje także, jak zebrane skoski można przerobić na kompost według standardowych przepisów, łącząc robotyczne utrzymanie terenów z prostym recyklingiem biomasy na miejscu.
Krok w kierunku czystszej, modułowej pielęgnacji ogrodów i gospodarstw
Podsumowując, artykuł argumentuje, że pojedynczy, zasilany z akumulatora robot z wymiennymi modułami może zastąpić małą flotę wyspecjalizowanych maszyn do koszenia, zbierania, rozdrabniania i siewu na niewielkich terenach zewnętrznych. Chociaż wszystkie wyniki pochodzą ze symulacji i prawdziwe próby terenowe są jeszcze przed zespołem, wnioski sugerują, że proponowana platforma czterokołowa może działać wydajnie, pokrywać pola całkowicie przy dobrze dobranych trasach, pozostawać stabilna na typowych nachyleniach i zachować bezpieczeństwo konstrukcyjne pod obciążeniem. Połączenie modułowej mechaniki z podstawową wizją maszynową i starannym zarządzaniem energią — oraz planem kompostowania zebranej biomasy — wskazuje na czystsze, bardziej elastyczne i bardziej zrównoważone podejście do pielęgnacji trawników i małych gospodarstw.
Cytowanie: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Słowa kluczowe: autonomiczny robot rolniczy, konserwacja trawników i pól, precyzyjny siew, planowanie pokrycia obszaru, kompostowanie skoszonej trawy