Clear Sky Science · en
Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation
Smarter Machines for Everyday Green Spaces
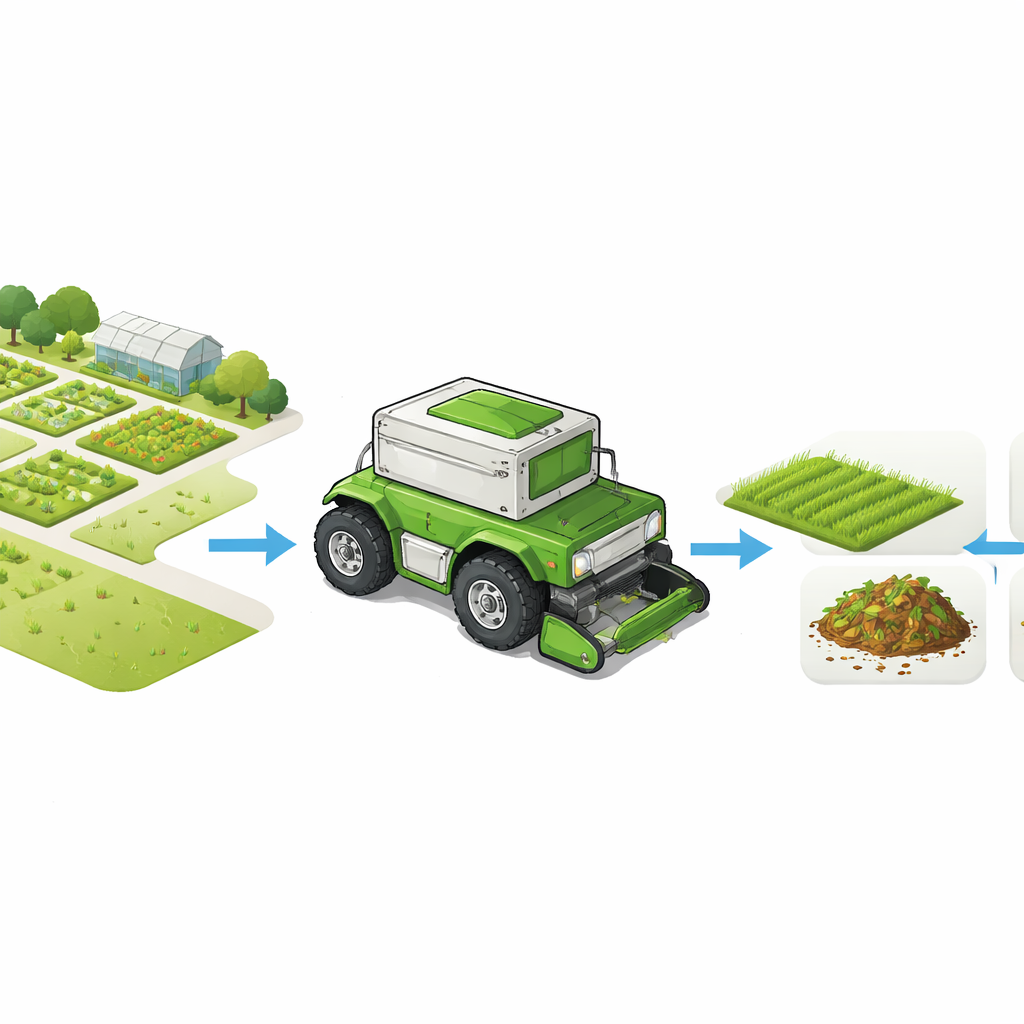
Keeping lawns, parks, and small farms neat usually means juggling several noisy, fuel-hungry machines—one for mowing, another for collecting clippings, a third for shredding leaves, and yet another for planting seeds. This paper describes a compact electric robot that aims to combine all of those chores into one modular, self-driving helper, designed for campuses, estates, and small agricultural plots. By swapping a few quick-release attachments, the same four-wheel machine can cut grass, collect and crush plant waste, and then return to plant seeds with careful spacing, all while running on a single battery pack and planning its own path across the field.
A Single Robot for Many Outdoor Jobs
At the heart of the study is a boxy four-wheel-drive robot with independent control of the left and right wheel pairs, allowing it to pivot on the spot and maneuver in tight corners. The designers split the machine into two stacked units: a rugged lower deck that holds the drive motors, electronics, and a powerful blower, and an upper box that serves as a large collection bin. Onto this shared chassis they mount quick-release toolheads—a high-torque grass trimmer for live turf, a crusher for dry leaves and light debris, and a rear seed-dispensing trailer. Transparent side panels let operators see inside for inspection and maintenance, and safety features such as guarded blades and bumpers are built in from the start.
How Cutting, Collecting, and Seeding Are Combined
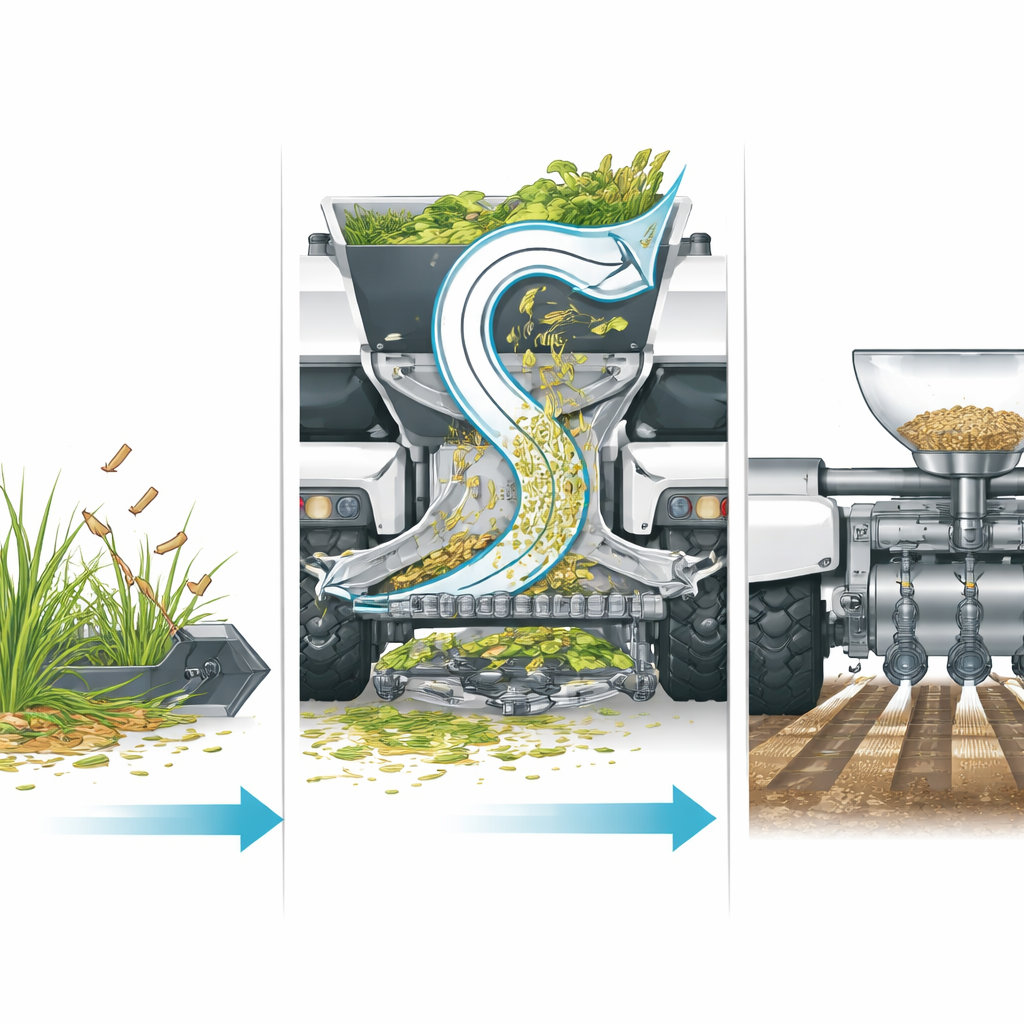
During mowing, the robot’s front trimmer cuts grass while a semi-circular bumper deflects stones and debris away from the blade. An S-shaped air duct and blower then suck the chopped clippings off the ground and lift them into the upper collection chamber, reducing the need for manual raking. For clean-up in dry seasons, the trimmer can be swapped for a crusher unit that shreds fallen leaves and light trash for easier handling. When it is time to plant, a small trailer couples to the rear hitch. Seeds flow from a hopper into a rotating drum with evenly spaced cavities, then drop through tubes into shallow furrows opened in the soil before a trailing flap closes the groove. By linking the drum’s speed to the robot’s driving speed, the system keeps seed spacing consistent even as the robot speeds up or slows down.
Teaching the Robot to See and Plan Its Work
The platform is designed to operate autonomously, guided by a combination of sensors and onboard decision software. A camera, laser scanner, and motion sensors feed data into an estimation module that fuses the signals and keeps track of the robot’s position with only a few centimeters of error. On top of this, a mission manager chooses between cutting, crushing, and seeding tasks, while a path planner and motion controller compute smooth routes and wheel speeds. The team also explores a camera-based method to estimate grass height from images, classifying patches as very short, short, medium, or long. This information can be used to raise or lower the trimmer on the fly, preventing unnecessary deep cuts and saving energy while keeping lawns visually uniform.
Testing Paths, Power, and Toughness in Simulation
Rather than building hardware immediately, the authors carry out a detailed set of computer-based tests. They estimate cutting rates, collection efficiency, and navigation accuracy, and work out how long a 24 volt, 50 amp-hour battery can support each task. Their models suggest that combined mowing and vacuum collection can run for about 1.2 hours per charge, leaf crushing for about 2 hours, and light-duty seeding for roughly 8 hours. They compare three coverage patterns for rectangular fields—zigzag, inward spiral, and concentric circles—and show that only the zigzag or “boustrophedon” pattern reliably covers every part of a rectangular plot without leaving uncut corners. Additional simulations examine how well the bumper deflects stones, how much wheel slip occurs on slopes, and how likely small rocks are to slip through the guard opening, with results indicating low risk of damage and acceptable traction on inclines up to around 25 degrees.
Checking the Strength of the Frame and Attachments
To make sure the robot’s body can withstand real-world use, the team runs finite element analyses—digital stress tests—on both the steel base frame and the lighter aluminum upper structure, as well as on the seed dispenser assembly. Under representative static loads, the calculated stresses are thousands of times lower than the materials’ yield limits, giving safety factors greater than 15 for both metal structures. In practical terms, this means the design is substantially overbuilt for the everyday forces expected during mowing, towing, and handling, leaving ample margin for heavier attachments or occasional bumps and shocks. The study also sketches out how collected clippings could be turned into compost through standard recipes, connecting robotic groundskeeping to simple on-site recycling of plant material.
A Step Toward Cleaner, Modular Yard and Farm Care
Overall, the paper argues that a single, battery-powered robot with swappable modules can replace a small fleet of specialized machines for cutting, collecting, shredding, and seeding in modest-sized outdoor spaces. Although all results are from simulation and real-world trials are still to come, the findings suggest that the proposed four-wheel platform can operate efficiently, cover fields completely with well-chosen paths, remain stable on typical slopes, and stay structurally safe under load. By pairing modular mechanics with basic machine vision and careful energy budgeting—and by planning to compost the collected biomass—the work points toward cleaner, more flexible, and more sustainable care of lawns and small farms.
Citation: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Keywords: autonomous agricultural robot, lawn and field maintenance, precision seeding, coverage path planning, composting grass clippings