Clear Sky Science · ja
刈取り・回収・精密播種を行うモジュラー式4WD農業ロボット:設計とシミュレーションに基づく評価
身近な緑地のための賢い機械
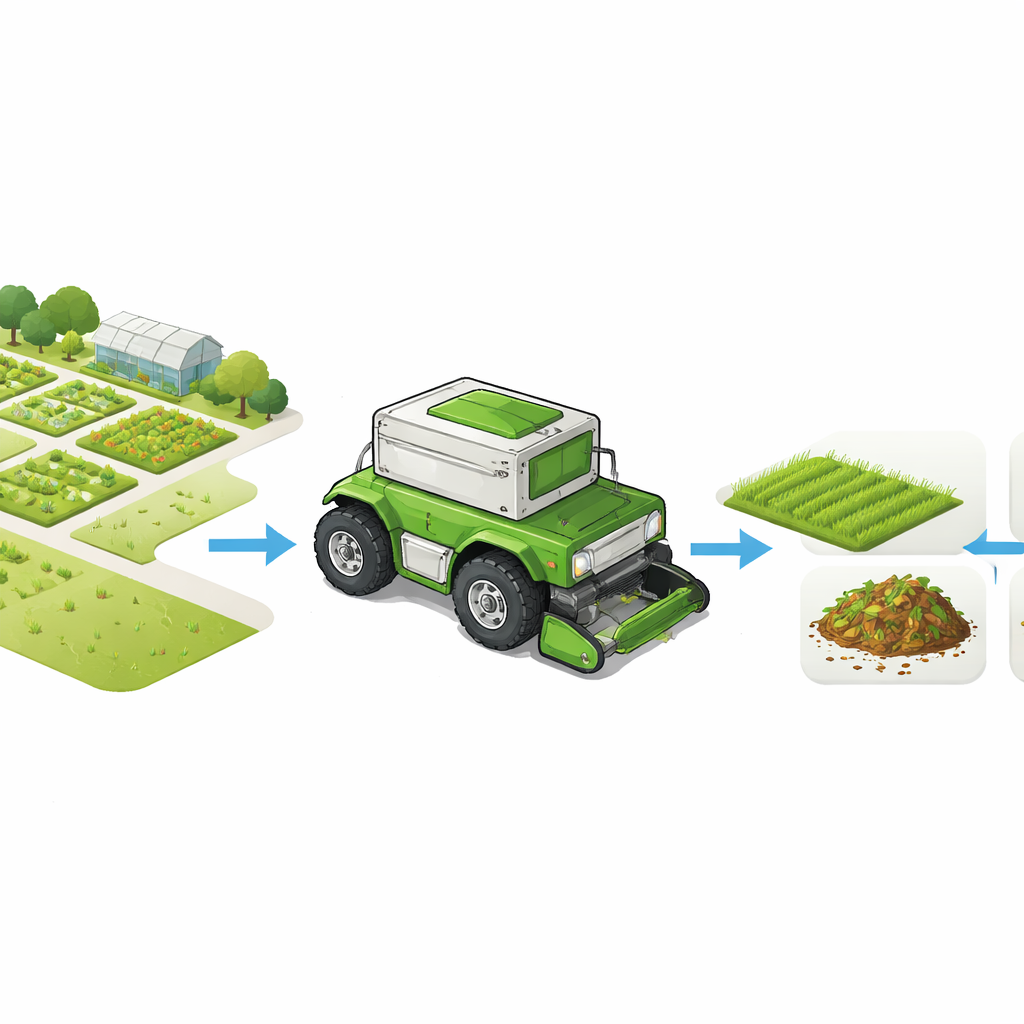
芝生、公園、小規模農地をきれいに保つには通常、複数の騒音を出す燃料依存の機械を使い分ける必要があります——刈払機、刈草回収機、落ち葉粉砕機、播種機など。本文では、キャンパス、邸宅、小規模農地向けに設計された、これらの作業をひとつに統合することを目指したコンパクトな電動ロボットを説明します。いくつかのクイックリリース式アタッチメントを付け替えることで、同じ四輪機体が芝の刈取り、植物残渣の回収・粉砕、そして間隔をそろえた播種を単一のバッテリで行い、自分でフィールド上の走行経路を計画します。
多用途の屋外作業を1台で
本研究の中核は、左側と右側の車輪群を独立制御できる角ばった四輪駆動ロボットで、場で旋回し狭い隅を曲がることが可能です。設計者は機体を上下に分け、駆動用モーター、電子機器、大風量ブロワーを収めた堅牢な下部デッキと、大きな回収容器を兼ねる上部ボックスに分割しました。この共通シャーシに高トルクの芝用トリマー、生葉や軽微なゴミを粉砕するクラッシャー、後部に取り付ける播種トレーラーなどのクイックリリース式ツールヘッドを搭載します。透明な側面パネルで内部を点検でき、安全のための保護されたブレードやバンパーも初期設計から組み込まれています。
刈取り・回収・播種の連携
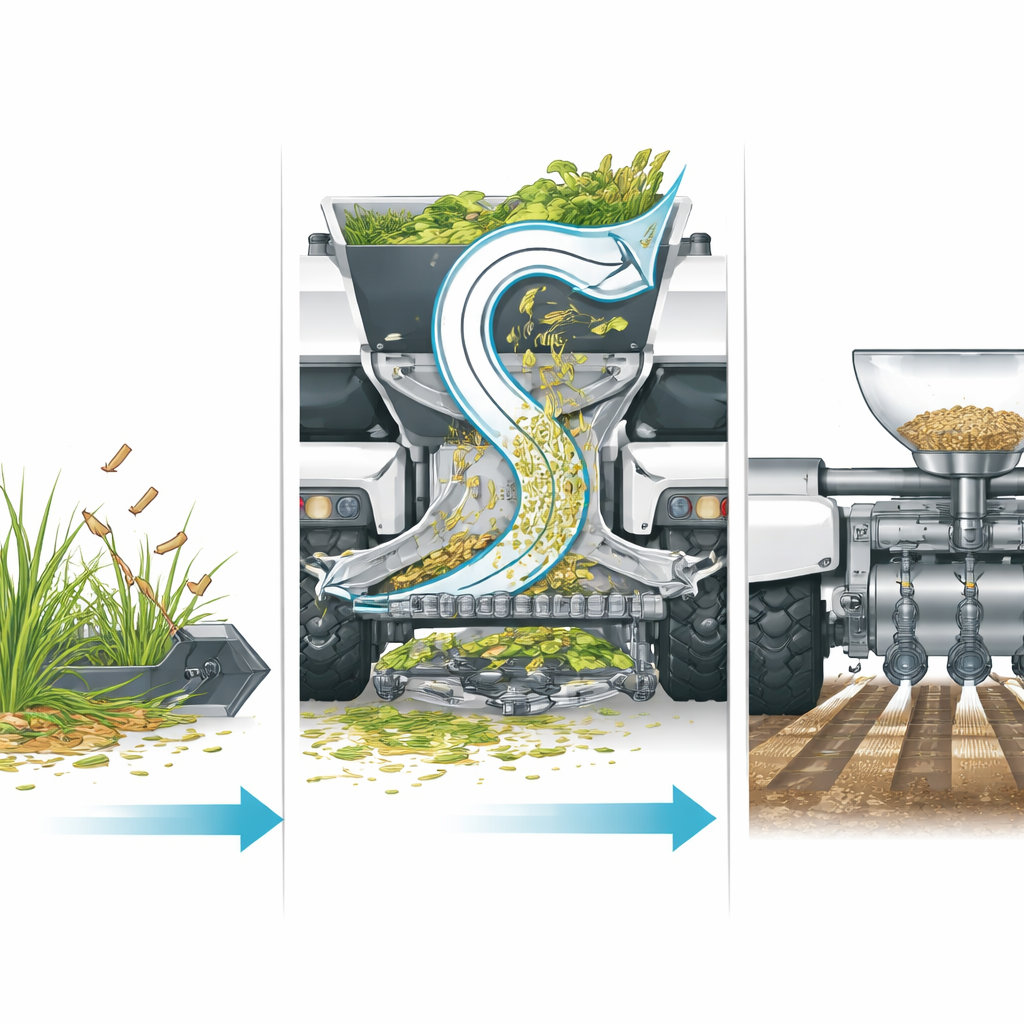
刈込時には、前方のトリマーが草を刈り、半円形のバンパーが刃から石や破片をそらします。S字形の導風路とブロワーが地面の切断片を吸い上げ上部の回収室へ送り、手作業の熊手がけを減らします。乾季の掃除では、トリマーを落ち葉や軽いゴミを粉砕するクラッシャーに交換できます。播種の際は小型トレーラーを後部ヒッチに連結します。ホッパーから流れた種子は等間隔の窪みをもつ回転ドラムに入り、チューブを通って浅い溝に落ち、後続のフラップが溝を閉じます。ドラムの回転速度をロボットの走行速度に連動させることで、走行速度が変わっても種子の間隔を一定に保ちます。
ロボットに見て計画させる仕組み
このプラットフォームはセンサーとオンボードの意思決定ソフトウェアの組合せで自律運用するよう設計されています。カメラ、レーザースキャナ、慣性等の運動センサが推定モジュールにデータを送り、信号を融合して位置を数センチの誤差に抑えます。その上でミッションマネージャが刈取り、粉砕、播種のタスクを選択し、経路プランナと運動コントローラが滑らかなルートと車輪速度を算出します。研究チームは画像から草丈を推定するカメラベースの手法も検討し、非常に短い・短い・中程度・長いの4段階に分類します。この情報はトリマーの高さを走行中に上下して不必要な深刈りを避け、エネルギーを節約しつつ見た目を均一に保つのに利用できます。
シミュレーションで経路・電力・耐久性を試験
研究者らは直ちにハードウェアを作る代わりに詳細なコンピュータベースの試験を実施しました。刈取り速度、回収効率、航法精度を見積もり、24ボルト50アンペア時のバッテリが各作業をどれだけ支えられるかを算出します。モデルでは、刈払+吸引回収が充電あたり約1.2時間、落ち葉粉砕が約2時間、軽い播種作業が約8時間動作すると示唆されます。長方形の区画に対してジグザグ、内側への螺旋、同心円の3つのカバレッジパターンを比較し、角の取り残しなく確実に全域を覆うのはジグザグ(boustrophedon)パターンのみであることを示します。追加のシミュレーションではバンパーが石をどれだけ逸らすか、斜面での車輪スリップ量、小石がガードの開口をすり抜ける可能性などを調べ、損傷リスクは低く、約25度までの傾斜で十分なトラクションが得られるという結果が得られました。
フレームとアタッチメントの強度確認
実運用に耐える機体であることを確認するため、チームは両方の金属構造——鉄製の下部フレームと軽量なアルミ製上部構造、及び播種装置——に対して有限要素解析というデジタル応力試験を行いました。代表的な静的荷重下で計算された応力は材料の降伏限界より何千分の一も低く、いずれの金属構造も安全率が15以上となりました。実務的には、これは設計が日常的に想定される刈取り、牽引、取り扱い時の力に対して十分に余裕を持って過剰設計されていることを意味し、より重いアタッチメントや偶発的な衝撃に対しても余裕があります。研究はまた、収集した刈草を一般的なレシピで堆肥に変える方法を概説し、ロボットによる造園作業と現場での植物資材の簡単なリサイクルを結びつけています。
よりクリーンでモジュラーな庭・農地管理への一歩
総じて、論文はスワップ可能なモジュールを備えた単一のバッテリー駆動ロボットが、刈取り、回収、粉砕、播種といった小規模な屋外空間での専門機群の代替になり得ると主張しています。全ての結果はシミュレーションに基づくものであり実地試験は今後ですが、提案する四輪プラットフォームは効率的に動作し、適切な経路を選べば区画を完全にカバーし、典型的な斜面上で安定し、荷重下でも構造的に安全であり得ることを示唆しています。モジュラー機構と基本的なマシンビジョン、慎重なエネルギー配分を組み合わせ、収集バイオマスの堆肥化を計画することで、よりクリーンで柔軟、かつ持続可能な芝や小規模農地の管理へ向けた示唆を与えます。
引用: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
キーワード: 自律型農業ロボット, 芝地と畑のメンテナンス, 精密播種, カバレッジ経路計画, 刈草の堆肥化