Clear Sky Science · he
רובוט חקלאי מודולרי 4WD לגיזום, איסוף וזריעה מדויקת: עיצוב והערכת סימולציה
מכונות חכמות למרחבים ירוקים יומיומיים
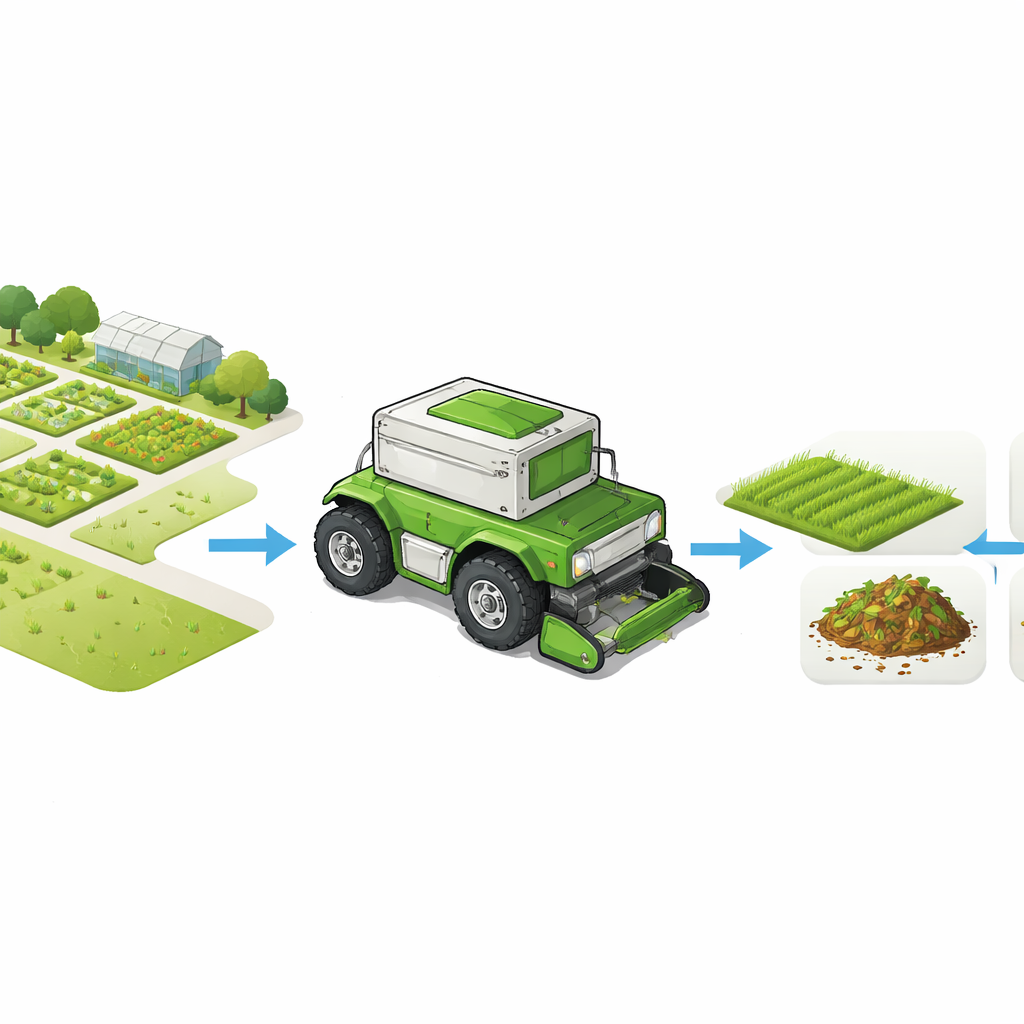
שמירה על דשאות, פארקים וחוות קטנות מסודרים בדרך כלל מחייבת שימוש בכמה מכונות רועשות ותובעניות בדלק—אחת לגיזום, אחרת לאיסוף הגזם, שלישית לטחינת עלים ועוד מכונה לזריעה. מאמר זה מתאר רובוט חשמלי קומפקטי שמטרתו לשלב את כל המשימות הללו לתוך עוזר מודולרי אחד ונהג-עצמי, המיועד לקמפוסים, אחוזות וחלקות חקלאיות קטנות. באמצעות החלפת מצופים מהירה ניתן לגרסה ארבע-גלגלית אחת לחתוך דשא, לאסוף ולמעוך שאריות צמחיות, ולאחר מכן לשוב ולזרוע זרע במרווחים בטוחים—הכל באמצעות חבילת סוללה אחת ותכנון מסלול עצמאי על פני השטח.
רובוט אחד להרבה עבודות חוצות
בלב המחקר עומד רובוט מרובע-גוף עם הנעה ארבע-גלגלית ובקרה עצמאית לזוג הגלגלים השמאלי והימני, המאפשר לו להסתובב במקום ולתמרן בפינות צמודות. המעצבים חילקו את המכונה לשני יחידות מגובבות: רצפה תחתונה עמידה הנושאת את המנועים, האלקטרוניקה ומניפה חזקה, ותיבה עליונה המשמשת כמאגר איסוף גדול. על השלדה הזו מרכיבים ראשי כלים במהירות שחרור—גוזם דשא בעל מומנט גבוה לדשא חי, מרסק לעלים יבשים ופסולת קלה ועגלה אחורית לפיזור זרעים. לוחות צד שקופים מאפשרים למפעילים לראות פנימה לבדיקות ותחזוקה, ותכונות בטיחות כגון להבים מוגנים וחצויות משולבות בעיצוב מההתחלה.
איך גיזום, איסוף וזריעה משולבים
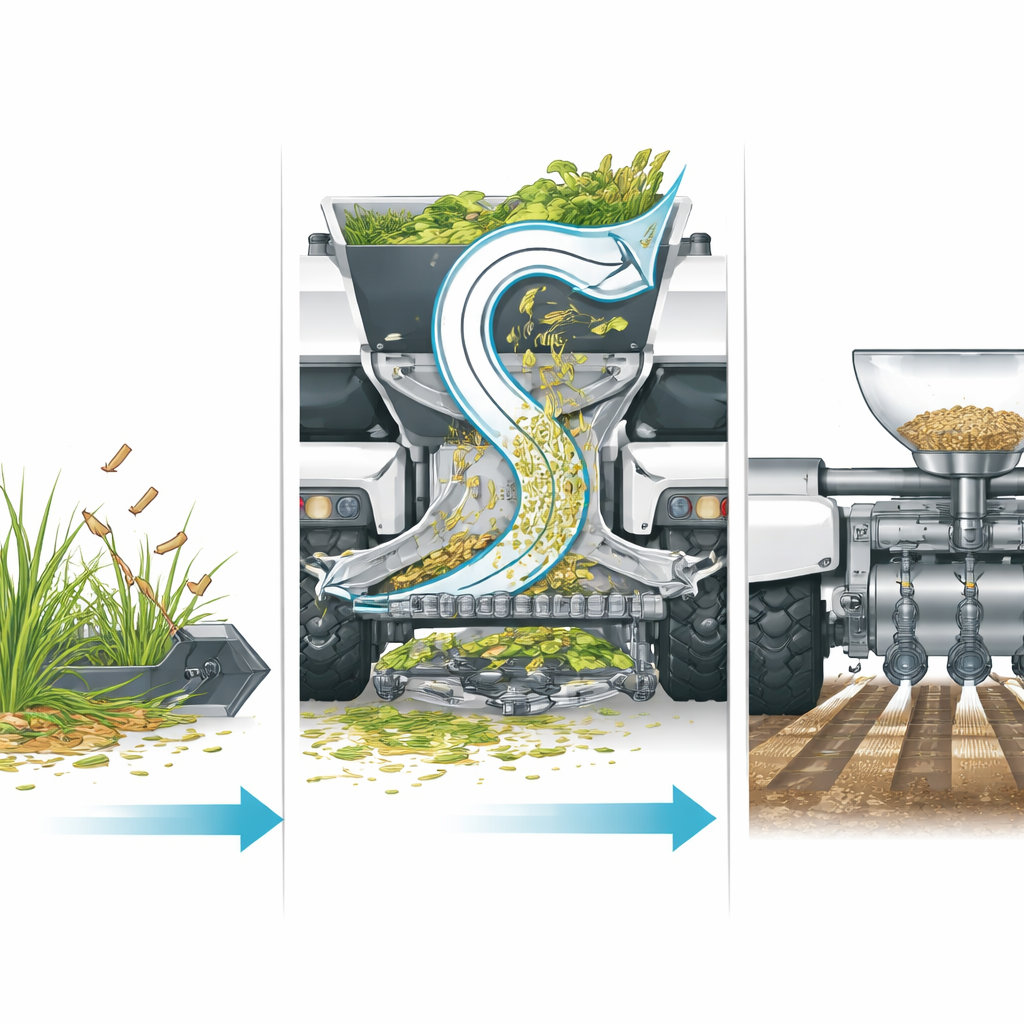
במהלך הגיזום, הגוזם הקדמי חותך את הדשא בעוד חצוץ חצי-עגול מפנה אבנים ופסולת מהלהב. מבנה אוויר בצורת S והמניפה שואבים את הגזם הקצוץ מהקרקע ומעבירים אותו לתא האיסוף העליון, ובכך מצמצמים את הצורך בגריפה ידנית. לניקוי בעונות יבשות ניתן להחליף את הגוזם ביחידת מריסה המפוררת עלים נופלים ופסולת קלה להטמנה וניהול קלים יותר. בעת הזריעה מחוברת עגלה קטנה לאפיק האחורי. הזרעים זורמים מפח לתוף מסתובב עם חללים מרווחים באופן שווה, ומטפטפים דרך צינורות לתעלות רדודות שנפתחו בקרקע לפני שפה עוקבת סוגרת את התעלה. בקישור מהירות התוף למהירות הנסיעה של הרובוט, המערכת שומרת על מרווח זריעה קבוע גם כאשר הרובוט מואץ או מואט.
להורות לרובוט לראות ולתכנן את עבודתו
הפלטפורמה תוכננה לפעול בצורה אוטונומית, מונחית על ידי שילוב חיישנים ותוכנת החלטה על-לוח. מצלמה, סורק לייזר וחיישני תנועה מזינים מודול הערכה הממזג את האותות ועוקב אחרי מיקום הרובוט בדיוק של כמה סנטימטרים בלבד. מעל לזה, מנהל משימות בוחר בין פעולות גיזום, מריסה וזריעה, בעוד מתכנן מסלול ובקר תנועה מחשבים נתיבים חלקים ומהירויות גלגלים. הצוות גם בוחן שיטה מבוססת מצלמה להערכת גובה הדשא מתמונות, המסווגת שׂטחים כקצר מאוד, קצר, בינוני או ארוך. מידע זה יכול לשמש להרים או להוריד את הגוזם תוך כדי תנועה, כדי למנוע חיתוכים עמוקים מיותרים ולחסוך אנרגיה תוך שמירה על מראה אחיד של הדשא.
בדיקת מסלולים, הספק ועמידות בסימולציה
במקום לבנות חומרה מיד, המחברים מבצעים סט מפורט של ניסויים ממוחשבים. הם מעריכים שיעורי חיתוך, יעילות איסוף ודיוק ניווט, וחישבו כמה זמן סוללה של 24 וולט, 50 אמפר-שעה יכולה לתמוך בכל משימה. המודלים שלהם מציעות שגיזום ושאיבה משולבים יכולים לפעול בערך 1.2 שעות לפריקה, מריסת עלים בערך 2 שעות, וזריעה במשימות קלות לכ-8 שעות. הם משווים שלושה תבניות כיסוי לשדות מלבניים—זיגזג, ספירלה פנימה, ומעגלים קונצנטריים—ומראים שרק תבנית הזיגזג או "בוסטרופדון" מכסה באופן אמין כל חלק מהחלקה המלבנית ללא השארת פינות בלתי מגוזמות. סימולציות נוספות בוחנות עד כמה החצוץ מפנה אבנים, כמה החלקה של גלגלים מתרחשת במדרונות, וכמה סלעים קטנים עלולים לעבור דרך פתח המגן, עם תוצאות המעידות על סיכון נמוך לנזק ואחיזת קרקע מקובלת על מדרונות עד סביב 25 מעלות.
בדיקת חוזק השלדה והמצופים
כדי לוודא ששלדת הרובוט תעמוד בשימוש בעולם האמיתי, הצוות מבצע ניתוחים בגישה של אלמנטים סופיים—מבחני מאמץ דיגיטליים—על מסגרת הבסיס מפלדה והמבנה העליון הקל מאלומיניום, וכן על מנגנון מחולל הזרעים. תחת עומסים סטטיים מייצגים, המתח החישובי נמוך באלפי חלקים מהגבולות הנשירה של החומרים, מה שנותן גורמי בטיחות הגדולים מ-15 לשתי המתכות. במונחים פרקטיים, משמעות הדבר היא שהעיצוב נראה בנוי בעוצמה רבה מהכוח היומיומי הצפוי במהלך גיזום, גרירה וטיפול, ומשאיר מרווח גדול לציוד כבד יותר או להיטרדות והלם מדי פעם. המחקר גם מצייר כיצד הגזם הנאסף יכול להפוך לקומפוסט באמצעות מתכונים סטנדרטיים, וקושר את תחזוקת המשטחים הרובוטית למיחזור פשוט באתר של חומר צמחי.
צעד לקראת טיפוח חצרות ושדות מודולרי ונקי יותר
בסך הכל, המאמר טוען שרובוט יחיד, מונע סוללה ובעל מודולים ניתנים להחלפה יכול להחליף צי קטן של מכונות מתמחות לגיזום, איסוף, טחינה וזריעה במרחבים חיצוניים בגודל מתון. אף על פי שכל התוצאות הן מסימולציה וניסויים בעולם האמיתי עדיין עתידים להתבצע, הממצאים מצביעים שהפלטפורמה הארבע-גלגלית המוצעת יכולה לפעול ביעילות, לכסות שדות באופן מלא עם מסלולים נבחרים היטב, להישאר יציבה על מדרונות אופייניים ולשמור על בטיחות מבנית תחת עומס. בזיווג מנגנון מודולרי עם ראייה ממכונה בסיסית ותקצוב אנרגיה קפדני—ובהמשך תכנון להפוך את הביומסה הנאספת לקומפוסט—העבודה מצביעה על תחזוקה נקייה, גמישה ובת-קיימא יותר של דשאות וחוות קטנות.
ציטוט: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
מילות מפתח: רובוט חקלאי אוטונומי, תחזוקת דשא ושדה, זריעה מדויקת, תכנון נתיב כיסוי, קומפוסטציה של גזעי דשא