Clear Sky Science · pt
Robô agrícola modular 4x4 para corte, coleta e semeadura de precisão: projeto e avaliação baseada em simulação
Máquinas mais inteligentes para espaços verdes do dia a dia
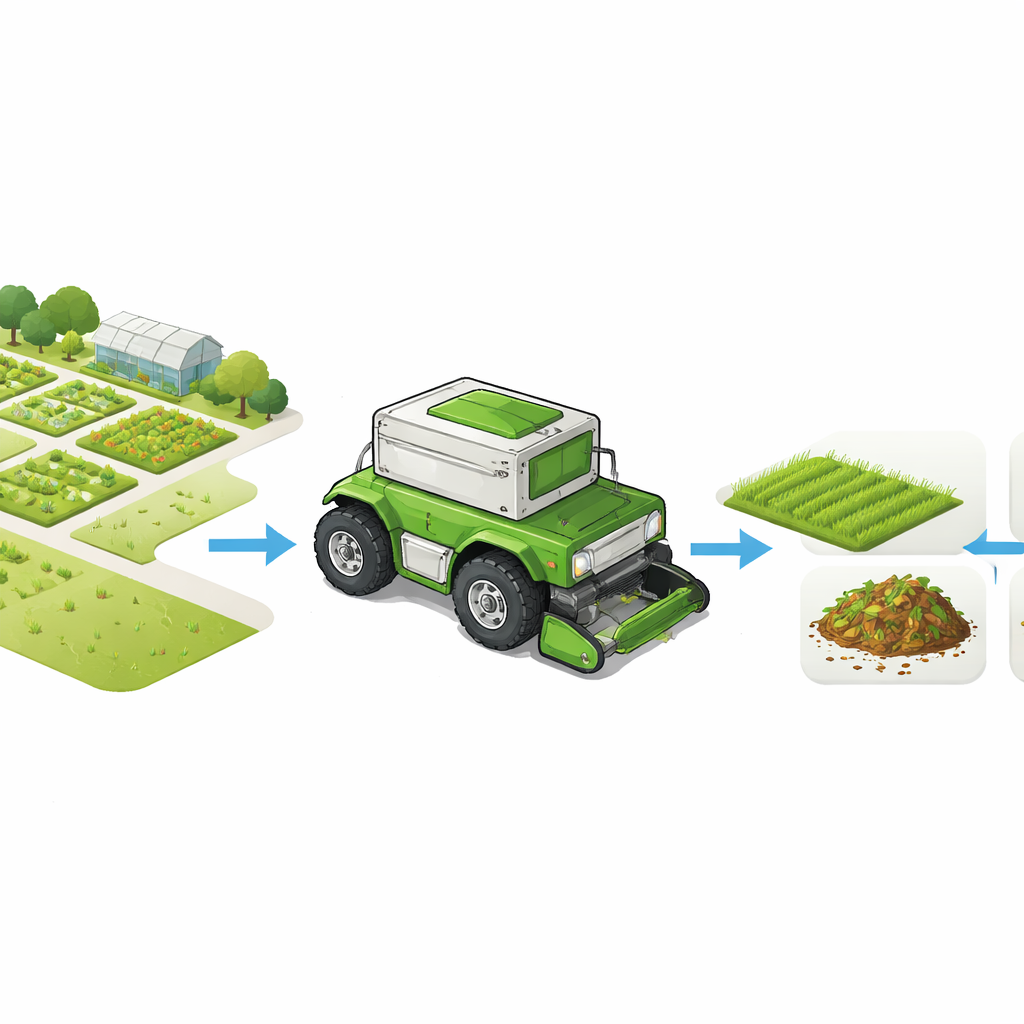
Manter gramados, parques e pequenas propriedades arrumados geralmente exige gerenciar várias máquinas barulhentas e sedentas por combustível — uma para cortar, outra para coletar aparas, uma terceira para triturar folhas e ainda outra para plantar sementes. Este artigo descreve um robô elétrico compacto que busca combinar todas essas tarefas em um ajudante modular e autônomo, projetado para campi, fazendas e pequenas áreas agrícolas. Ao trocar alguns implementos de liberação rápida, a mesma máquina de quatro rodas pode cortar a grama, coletar e triturar resíduos vegetais e depois voltar para semear com espaçamento preciso, tudo funcionando com uma única bateria e planejando seu próprio trajeto pelo terreno.
Um único robô para diversos trabalhos ao ar livre
No cerne do estudo está um robô quadrado com tração integral e controle independente dos pares de rodas esquerdo e direito, permitindo que ele gire no próprio eixo e manobre em cantos apertados. Os projetistas dividiram a máquina em duas unidades empilhadas: um convés inferior robusto que abriga os motores de tração, a eletrônica e um soprador potente, e uma caixa superior que funciona como um grande compartimento de coleta. Sobre esse chassi compartilhado montam-se cabeçotes de ferramentas de liberação rápida — um aparador de grama de alto torque para relva viva, um triturador para folhas secas e detritos leves, e um reboque distribuidor de sementes na traseira. Painéis laterais transparentes permitem que os operadores inspecionem o interior para manutenção, e itens de segurança como lâminas protegidas e para-choques são incorporados desde o início.
Como corte, coleta e semeadura são combinados
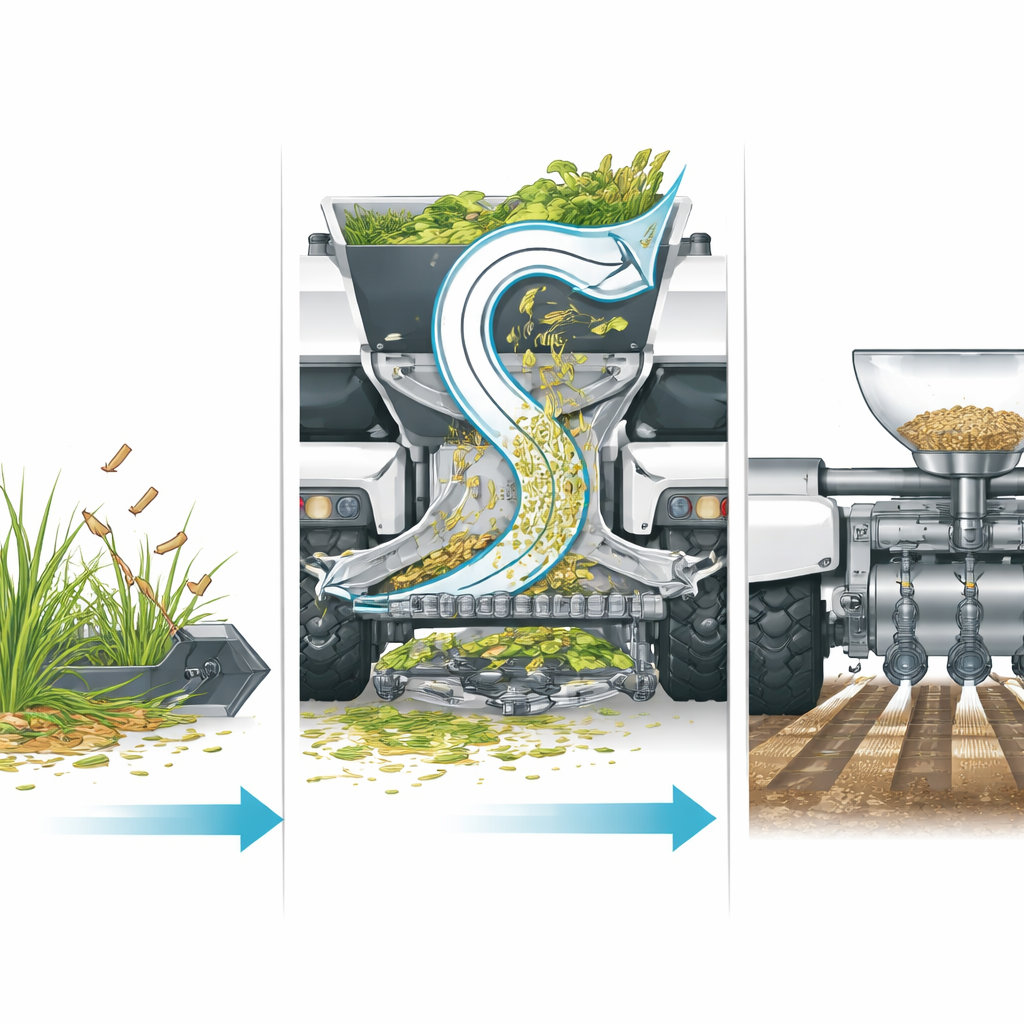
Durante a poda, o aparador frontal corta a grama enquanto um para-choque semicircular desvia pedras e detritos da lâmina. Um duto de ar em S e um soprador então sugam as aparas do solo e as elevam para a câmara de coleta superior, reduzindo a necessidade de rastelar manualmente. Para limpeza em estações secas, o aparador pode ser substituído por um módulo triturador que desfaz folhas caídas e lixo leve para facilitar o manuseio. Na hora da semeadura, um pequeno reboque acopla-se ao engate traseiro. As sementes fluem de um funil para um tambor rotativo com cavidades espaçadas de forma uniforme, depois caem por tubos em sulcos rasos abertos no solo antes de uma aba posterior fechar o sulco. Ao vincular a velocidade do tambor à velocidade de deslocamento do robô, o sistema mantém o espaçamento das sementes consistente mesmo quando o robô acelera ou desacelera.
Ensinando o robô a ver e planejar seu trabalho
A plataforma foi projetada para operar de forma autônoma, guiada por uma combinação de sensores e software de decisão embarcado. Uma câmera, um scanner a laser e sensores de movimento alimentam um módulo de estimação que funde os sinais e mantém o rastreio da posição do robô com apenas alguns centímetros de erro. Sobre isso, um gerenciador de missão escolhe entre as tarefas de corte, trituração e semeadura, enquanto um planejador de trajetórias e um controlador de movimento calculam rotas suaves e velocidades das rodas. A equipe também explora um método baseado em câmera para estimar a altura da grama a partir de imagens, classificando áreas como muito baixa, baixa, média ou alta. Essa informação pode ser usada para subir ou baixar o aparador em tempo real, evitando cortes desnecessariamente profundos e economizando energia enquanto mantém os gramados visualmente uniformes.
Testando trajetos, energia e resistência em simulação
Em vez de construir o hardware imediatamente, os autores realizam um conjunto detalhado de testes por computador. Eles estimam taxas de corte, eficiência de coleta e precisão de navegação, e calculam quanto tempo uma bateria de 24 V e 50 Ah pode sustentar cada tarefa. Seus modelos sugerem que o corte combinado com a aspiração pode operar por cerca de 1,2 horas por carga, a trituração de folhas por cerca de 2 horas, e a semeadura de baixa intensidade por aproximadamente 8 horas. Eles comparam três padrões de cobertura para campos retangulares — ziguezague, espiral para dentro e círculos concêntricos — e mostram que apenas o padrão ziguezague ou “boustrophedon” cobre de forma confiável todas as partes de um lote retangular sem deixar cantos sem corte. Simulações adicionais examinam quão bem o para-choque desvia pedras, quanto derrapagem de rodas ocorre em inclinações e quão provável é que pequenas pedras passem pela abertura de proteção, com resultados indicando baixo risco de danos e tração aceitável em aclives de até cerca de 25 graus.
Verificando a resistência do quadro e dos acessórios
Para garantir que a estrutura do robô suporte o uso no mundo real, a equipe executa análises por elementos finitos — testes digitais de tensão — tanto na base de aço quanto na estrutura superior mais leve de alumínio, bem como no conjunto distribuidor de sementes. Sob cargas estáticas representativas, as tensões calculadas são milhares de vezes menores que os limites de escoamento dos materiais, conferindo fatores de segurança maiores que 15 para ambas as estruturas metálicas. Em termos práticos, isso significa que o projeto é substancialmente sobredimensionado para as forças cotidianas esperadas durante corte, reboque e manuseio, deixando margem ampla para implementos mais pesados ou pancadas ocasionais. O estudo também esboça como as aparas coletadas poderiam ser transformadas em composto por receitas padrão, conectando a manutenção robótica de áreas verdes a uma reciclagem simples de biomassa no local.
Um passo rumo a cuidados modulares e mais limpos de jardins e fazendas
No geral, o artigo defende que um único robô movido a bateria com módulos intercambiáveis pode substituir uma pequena frota de máquinas especializadas para cortar, coletar, triturar e semear em espaços externos de tamanho modesto. Embora todos os resultados provenham de simulações e testes em campo ainda estejam por vir, as conclusões sugerem que a plataforma proposta de quatro rodas pode operar com eficiência, cobrir completamente os campos com trajetos bem escolhidos, permanecer estável em aclives típicos e manter segurança estrutural sob carga. Ao emparelhar uma mecânica modular com visão computacional básica e um orçamento de energia cuidadoso — e ao planejar a compostagem da biomassa coletada — o trabalho aponta para um cuidado de gramados e pequenas fazendas mais limpo, flexível e sustentável.
Citação: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Palavras-chave: robô agrícola autônomo, manutenção de gramados e campos, semeadura de precisão, planejamento de percurso de cobertura, compostagem de aparas de grama