Clear Sky Science · tr
Kesme, toplama ve hassas ekim için modüler 4x4 tarım robotu: tasarım ve simülasyon tabanlı değerlendirme
Günlük Yeşil Alanlar için Daha Akıllı Makineler
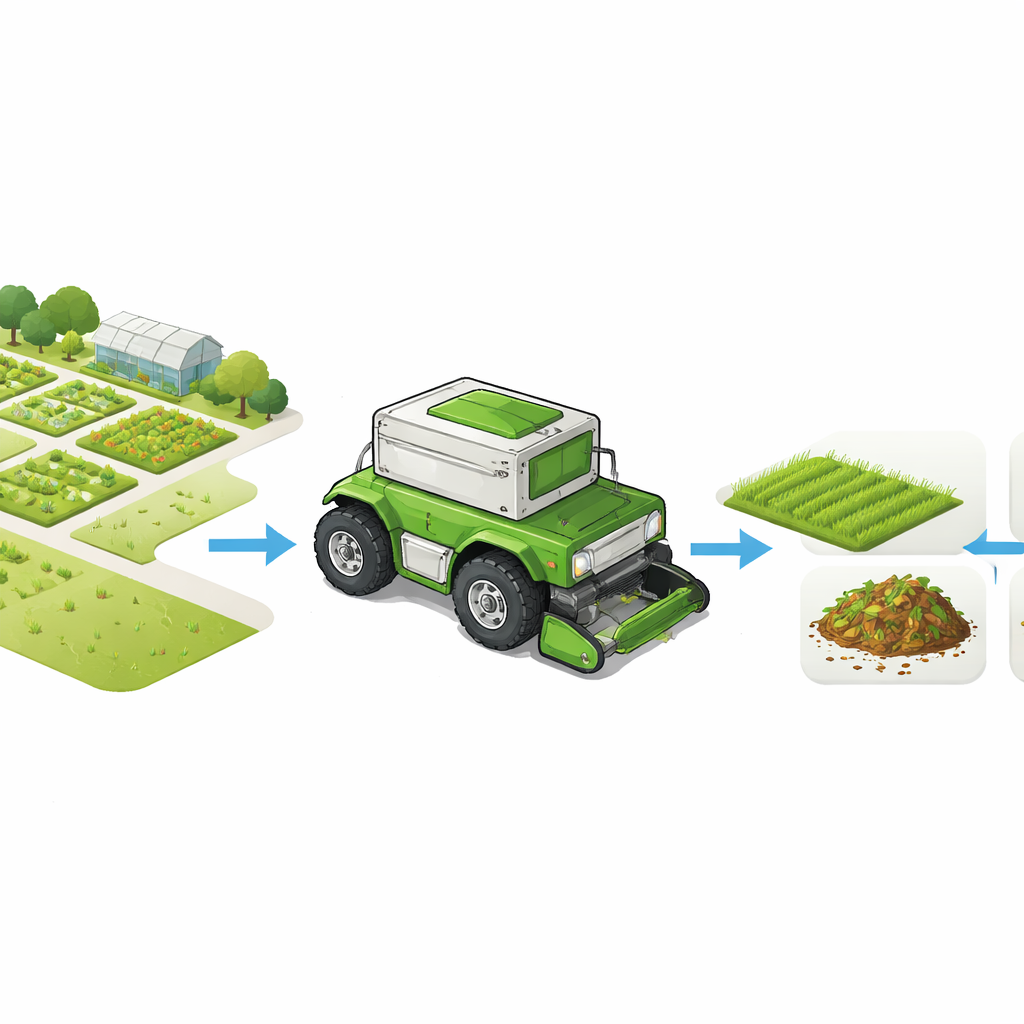
Çimler, parklar ve küçük çiftliklerin düzenli tutulması genellikle birkaç gürültülü, yakıt tüketen makinenin aynı anda kullanılmasını gerektirir—biri biçme, diğeri kırpıntıları toplama, bir başkası yaprakları parçalama ve bir diğeri tohum ekme işine adanmıştır. Bu makale, kampüsler, mülkler ve küçük tarım alanları için tek bir modüler, kendi kendine giden yardımcıya bu işleri birleştirmeyi hedefleyen kompakt elektrikli bir robotu anlatır. Birkaç hızlı serbest bırakmalı ek parça takarak aynı dört tekerlekli makine çimleri kesebilir, bitki artıklarını toplayıp ezebilir ve ardından dikkatli aralıklarla tohum ekmek üzere geri dönebilir; tüm bunları tek bir batarya paketinde çalışarak ve kendi tarladaki yolunu planlayarak yapar.
Birçok Açık Hava İşi için Tek Bir Robot
Çalışmanın merkezinde, sol ve sağ tekerlek çiftlerinin bağımsız kontrolüne izin veren, yerinde dönme ve sık köşelerde manevra yapabilen kutu biçimli bir dört çeker robot vardır. Tasarımcılar makineyi iki üst üste konmuş birime ayırmıştır: sürücü motorlarını, elektroniği ve güçlü bir üfleyiciyi barındıran sağlam alt güverte ve büyük bir toplama haznesi görevi gören üst kutu. Bu ortak şasi üzerine yüksek torklu bir çim tıraş makinesi (canlı çimler için), kuru yapraklar ve hafif döküntüler için bir ezici ve arka tohum dağıtıcı römork gibi hızlı serbest bırakmalı alet başlıkları monte edilir. Şeffaf yan paneller operatörlerin bakım ve denetim için içeri bakmasına izin verir ve korunmuş bıçaklar ile tamponlar gibi güvenlik özellikleri baştan tasarıma dâhil edilmiştir.
Kesme, Toplama ve Ekim Nasıl Birleştiriliyor
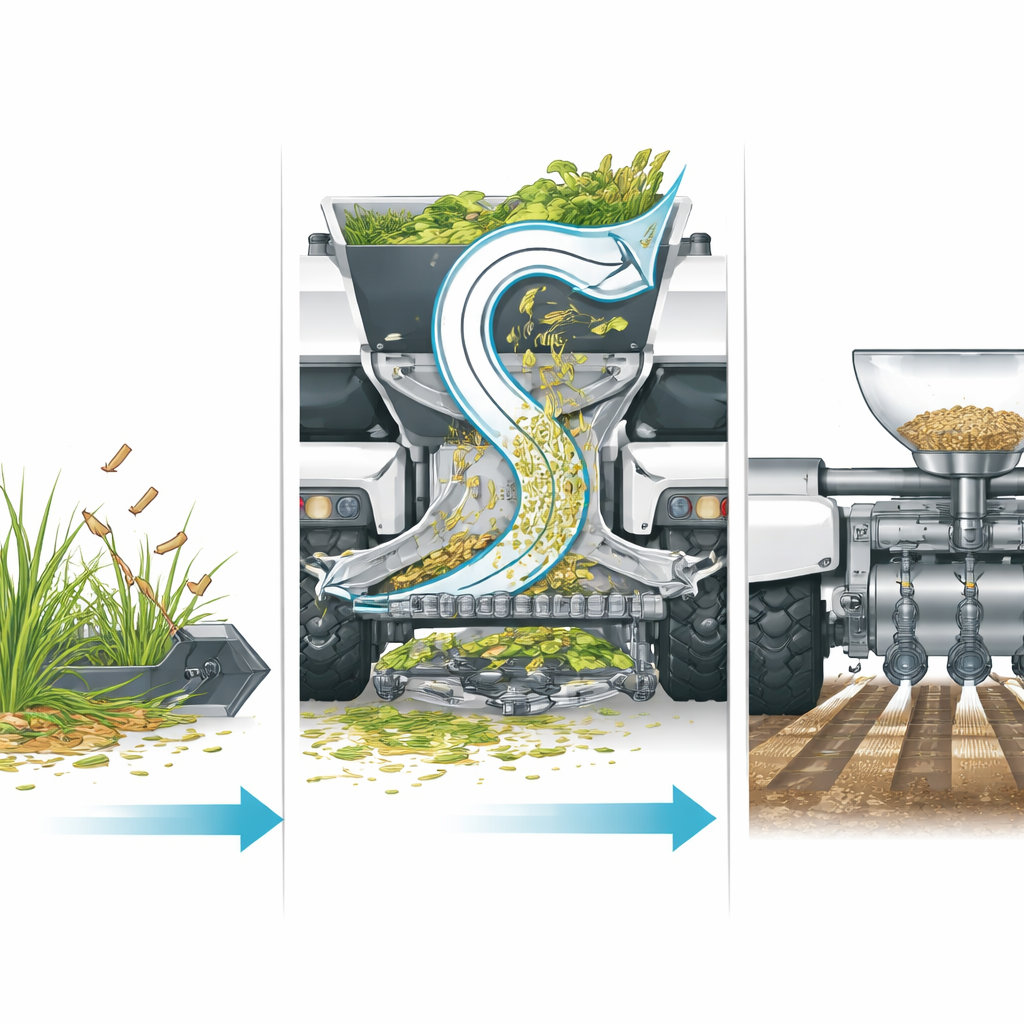
Biçme sırasında robotun ön tıraşı çimleri keser; yarım daire şeklindeki tampon taş ve döküntüleri bıçaktan uzaklaştırır. S şeklinde bir hava kanalı ve üfleyici, kesilen kırpıntıları zeminden çeker ve üst toplama haznesine kaldırır, böylece elle tırmıklama ihtiyacını azaltır. Kuru mevsimlerde temizlik yapmak için tıraş ünitesi, düşen yaprakları ve hafif çöpleri daha kolay işlenebilmeleri için parçalayan bir ezici ünitesiyle değiştirilebilir. Ekim zamanı geldiğinde küçük bir römork arka çekme kancasına bağlanır. Tohumlar bir hazneden eşit aralıklı oyuklara sahip dönen bir tambura akar, ardından borular aracılığıyla toprakta açılan sığ furrowlara düşer ve arkasından gelen bir kapak oluğu kapatır. Tamburun hızını robotun sürüş hızına bağlayarak sistem, robot hızlandığında veya yavaşladığında bile tohum aralığını sabit tutar.
Robotu Görmeyi ve İşini Planlamayı Öğretmek
Platform, sensörler ve yerleşik karar yazılımının birleşimiyle otonom çalışacak şekilde tasarlanmıştır. Bir kamera, lazer tarayıcı ve hareket sensörleri, sinyalleri birleştiren ve robotun konumunu yalnızca birkaç santimetre hatayla izleyen bir kestirim modülüne veri besler. Bunun üzerinde bir görev yöneticisi kesme, ezme ve ekim görevleri arasında seçim yapar; bir yol planlayıcı ve hareket kontrolörü ise düzgün rotalar ve tekerlek hızları hesaplar. Ekip ayrıca görüntülerden çim yüksekliğini tahmin etmeye yönelik kamera tabanlı bir yöntemi inceler; yamaları çok kısa, kısa, orta veya uzun olarak sınıflandırır. Bu bilgi, tıraşı anlık olarak kaldırıp alçaltmak için kullanılabilir; gereksiz derin kesimleri önleyerek enerji tasarrufu sağlar ve çimlerin görsel olarak daha düzgün kalmasına yardımcı olur.
Yolları, Gücü ve Dayanıklılığı Simülasyonda Test Etmek
Donanımı hemen inşa etmek yerine yazarlar ayrıntılı bir bilgisayar tabanlı test dizisi yürütürler. Kesim hızlarını, toplama verimliliğini ve gezinme doğruluğunu tahmin eder, ayrıca 24 volt, 50 amper-saatlik bir bataryanın her görevi ne kadar destekleyebileceğini hesaplarlar. Modelleri, birleşik biçme ve vakumla toplamanın şarj başına yaklaşık 1,2 saat çalışabileceğini, yaprak ezmenin yaklaşık 2 saat, hafif görevli ekimin ise kabaca 8 saat sürebileceğini öne sürer. Dikdörtgen tarlalar için zikzak, içe doğru spiral ve eş merkezli daireler olmak üzere üç örtüşme desenini karşılaştırırlar ve yalnızca zikzak ya da “boustrophedon” deseninin dikdörtgen bir parselin köşelerini kesmeden her bölümünü güvenilir şekilde kapladığını gösterirler. Ek simülasyonlar tamponun taşları nasıl saptırdığını, eğimlerde ne kadar tekerlek kayması olduğunu ve küçük kayaların koruyucu açıklıktan ne kadar kolay geçtiğini inceler; sonuçlar yaklaşık 25 dereceye kadar eğimlerde hasar riski düşük ve çekişin kabul edilebilir olduğunu gösterir.
Gövde ve Eklentilerin Dayanıklılığını Kontrol Etmek
Robotun gövdesinin gerçek dünya kullanımıyla başa çıkabileceğinden emin olmak için ekip hem çelik taban çerçeve hem de daha hafif alüminyum üst yapı ile tohum dağıtıcı düzeni üzerinde sonlu eleman analizleri—sayısal gerilme testleri—yürütür. Temsilî statik yükler altında hesaplanan gerilmeler, malzemelerin akma sınırlarının binlerce kat altında olup, her iki metal yapı için de 15’ten büyük güvenlik katsayıları verir. Pratik anlamda bu, tasarımın biçme, çekme ve taşıma sırasında beklenen günlük kuvvetler için önemli ölçüde fazla tasarlandığı; daha ağır eklentiler veya ara sıra oluşan çarpma ve şoklar için bol marj bıraktığı anlamına gelir. Çalışma ayrıca toplanan kırpıntıların standart reçetelerle nasıl kompost haline getirilebileceğini taslak halinde sunarak, robotik bahçe bakımını sahada basit bitki materyali geri dönüşümüne bağlar.
Daha Temiz, Modüler Bahçe ve Tarım Bakımına Doğru Bir Adım
Genel olarak makale, değiştirilebilir modüllere sahip tek bir bataryalı robotun, mütevazı büyüklükte açık alanlarda kesme, toplama, parçalama ve ekim işleri için küçük bir uzman makine filosunun yerini alabileceğini savunur. Tüm sonuçlar simülasyondan elde edilmiş olup saha denemeleri henüz yapılmamış olsa da bulgular, önerilen dört tekerlekli platformun verimli çalışabileceğini, iyi seçilmiş yollarla tarlaları tamamen kaplayabileceğini, tipik eğimlerde stabil kalabileceğini ve yük altında yapısal olarak güvenli kalacağını gösterir. Modüler mekanikleri temel makine görüşü ve dikkatli enerji yönetimiyle birleştirip toplanan biyokütleyi kompostlamayı planlayarak çalışma, çimliklerin ve küçük çiftliklerin daha temiz, esnek ve sürdürülebilir bakımına doğru bir yönelim işaret eder.
Atıf: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Anahtar kelimeler: özerk tarım robotu, çimlik ve tarla bakımı, hassas ekim, örtüşme yol planlaması, çim kırpıntılarının kompostlanması