Clear Sky Science · es
Robot agrícola modular 4x4 para corte, recogida y siembra de precisión: diseño y evaluación mediante simulación
Máquinas más inteligentes para espacios verdes cotidianos
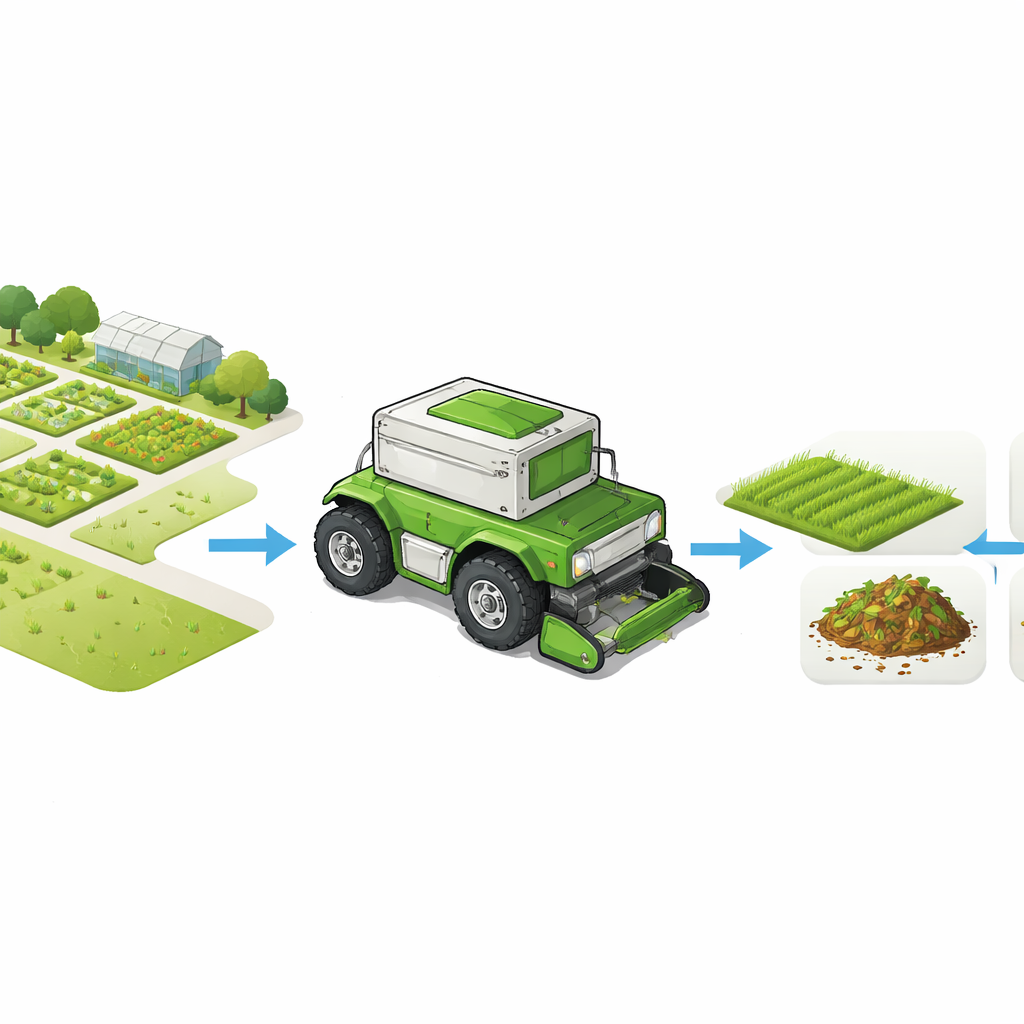
Mantener ordenados los jardines, parques y pequeñas explotaciones agrícolas suele implicar manejar varias máquinas ruidosas y consumidoras de combustible: una para cortar, otra para recoger los recortes, una tercera para triturar hojas y otra más para sembrar. Este artículo describe un robot compacto eléctrico que pretende combinar todas esas tareas en un solo asistente modular y autónomo, diseñado para campus, fincas y pequeñas parcelas agrícolas. Mediante el intercambio de algunos accesorios de liberación rápida, la misma máquina 4x4 puede cortar el césped, recoger y triturar residuos vegetales y luego volver para plantar semillas con espaciado controlado, todo funcionando con un único paquete de baterías y planificando su propia trayectoria a través del terreno.
Un solo robot para muchos trabajos exteriores
En el centro del estudio está un robot de forma rectangular con tracción en las cuatro ruedas y control independiente de los pares de ruedas izquierdo y derecho, lo que le permite girar sobre sí mismo y maniobrar en esquinas estrechas. Los diseñadores dividieron la máquina en dos unidades apiladas: una plataforma inferior resistente que aloja los motores de tracción, la electrónica y un potente soplador, y una caja superior que sirve como gran depósito de recogida. Sobre este chasis compartido montan cabezales de herramienta de liberación rápida: un recortador de césped de alto par para césped vivo, una trituradora para hojas secas y residuos ligeros, y un remolque dispensador de semillas en la parte trasera. Paneles laterales transparentes permiten a los operarios inspeccionar el interior para mantenimiento, y las medidas de seguridad, como las cuchillas protegidas y los paragolpes, están integradas desde el diseño inicial.
Cómo se combinan corte, recogida y siembra
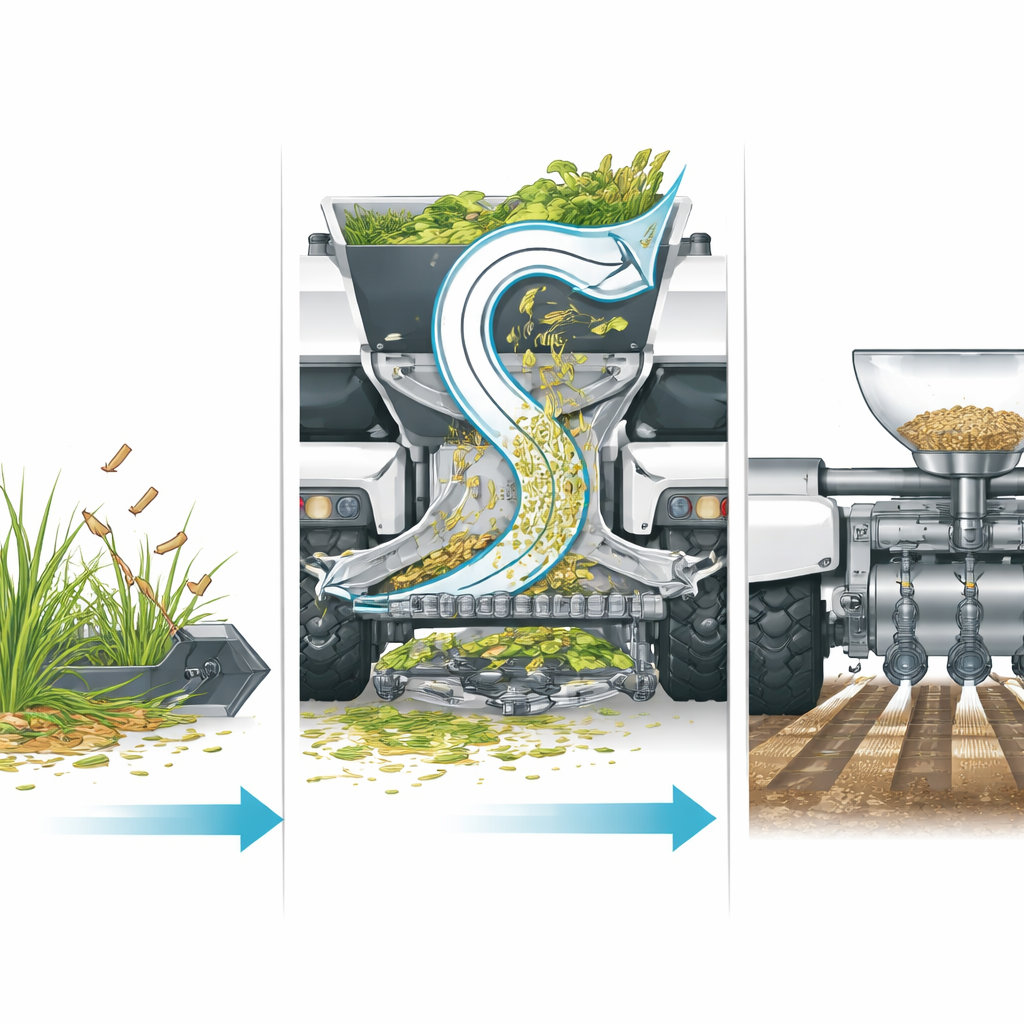
Durante el corte, el recortador frontal del robot corta el césped mientras un paragolpes semicircular desvía piedras y escombros de la cuchilla. Un conducto de aire en forma de S y el soplador aspiran los recortes del suelo y los elevan hasta la cámara de recogida superior, reduciendo la necesidad de rastrillar manualmente. Para la limpieza en temporadas secas, el recortador se puede sustituir por una unidad trituradora que desmenuza las hojas caídas y la basura ligera para facilitar su manejo. Cuando llega el momento de sembrar, un pequeño remolque se acopla al enganche trasero. Las semillas fluyen desde una tolva hacia un tambor giratorio con cavidades espaciadas uniformemente, que luego caen por tubos a surcos someros abiertos en el suelo antes de que una aleta de cierre los tapone. Al vincular la velocidad del tambor con la velocidad de avance del robot, el sistema mantiene un espaciado de semillas constante incluso cuando el robot acelera o disminuye la marcha.
Enseñar al robot a ver y planificar su trabajo
La plataforma está diseñada para operar de forma autónoma, guiada por una combinación de sensores y software de decisión a bordo. Una cámara, un escáner láser y sensores de movimiento alimentan un módulo de estimación que fusiona las señales y mantiene el seguimiento de la posición del robot con solo unos pocos centímetros de error. Sobre esto, un gestor de misión elige entre las tareas de corte, trituración y siembra, mientras que un planificador de rutas y un controlador de movimiento calculan trayectorias suaves y velocidades de rueda. El equipo también explora un método basado en cámara para estimar la altura del césped a partir de imágenes, clasificando parches como muy corto, corto, medio o alto. Esta información puede usarse para subir o bajar el recortador al vuelo, evitando cortes innecesariamente profundos y ahorrando energía mientras se mantiene una apariencia uniforme del césped.
Probar rutas, potencia y robustez mediante simulación
En lugar de construir el hardware de inmediato, los autores llevan a cabo un conjunto detallado de pruebas por ordenador. Estiman tasas de corte, eficiencia de recogida y precisión de navegación, y calculan cuánto tiempo puede sostener cada tarea una batería de 24 voltios y 50 amperio-hora. Sus modelos sugieren que el corte combinado con la recogida por vacío puede funcionar aproximadamente 1,2 horas por carga, la trituración de hojas alrededor de 2 horas y la siembra ligera cerca de 8 horas. Comparan tres patrones de cobertura para campos rectangulares —zigzag, espiral hacia adentro y círculos concéntricos— y muestran que solo el patrón zigzag o “boustrophedon” cubre de forma fiable todas las partes de una parcela rectangular sin dejar esquinas sin cortar. Simulaciones adicionales examinan cómo desvía el paragolpes las piedras, cuánto patinado de ruedas ocurre en pendientes y con qué probabilidad pequeñas rocas se deslizan por la abertura protectora, con resultados que indican un bajo riesgo de daño y una tracción aceptable en inclinaciones de hasta alrededor de 25 grados.
Comprobar la resistencia del chasis y los accesorios
Para asegurarse de que la estructura del robot puede soportar el uso real, el equipo realiza análisis por elementos finitos —pruebas de esfuerzo digitales— tanto en el bastidor base de acero como en la estructura superior más ligera de aluminio, así como en el conjunto dispensador de semillas. Bajo cargas estáticas representativas, las tensiones calculadas son miles de veces inferiores a los límites elásticos de los materiales, ofreciendo factores de seguridad mayores de 15 para ambas estructuras metálicas. En términos prácticos, esto significa que el diseño está sobredimensionado con respecto a las fuerzas cotidianas esperadas durante el corte, el remolque y la manipulación, dejando amplio margen para accesorios más pesados u golpes y sacudidas ocasionales. El estudio también esboza cómo los recortes recogidos podrían convertirse en compost mediante recetas estándar, conectando el mantenimiento robótico de áreas verdes con el reciclaje sencillo in situ de material vegetal.
Un paso hacia un cuidado modular y más limpio de jardines y granjas
En conjunto, el artículo sostiene que un único robot eléctrico con módulos intercambiables puede reemplazar a una pequeña flota de máquinas especializadas para cortar, recoger, triturar y sembrar en espacios exteriores de tamaño modesto. Aunque todos los resultados provienen de simulación y las pruebas en el mundo real aún están por realizarse, los hallazgos sugieren que la plataforma propuesta de cuatro ruedas puede operar con eficiencia, cubrir completamente los campos con rutas bien escogidas, mantenerse estable en pendientes típicas y permanecer estructuralmente segura bajo carga. Al combinar mecánica modular con visión por máquina básica y una gestión cuidadosa de la energía —y planificando el compostaje de la biomasa recogida— el trabajo apunta a un cuidado de céspedes y pequeñas explotaciones más limpio, flexible y sostenible.
Cita: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Palabras clave: robot agrícola autónomo, mantenimiento de céspedes y campos, siembra de precisión, planificación de rutas de cobertura, compostaje de recortes de césped