Clear Sky Science · nl
Modulaire 4WD landbouwrobot voor maaien, verzamelen en precisie zaaien: ontwerp en simulatie-gebaseerde evaluatie
Slimmere machines voor alledaagse groene ruimten
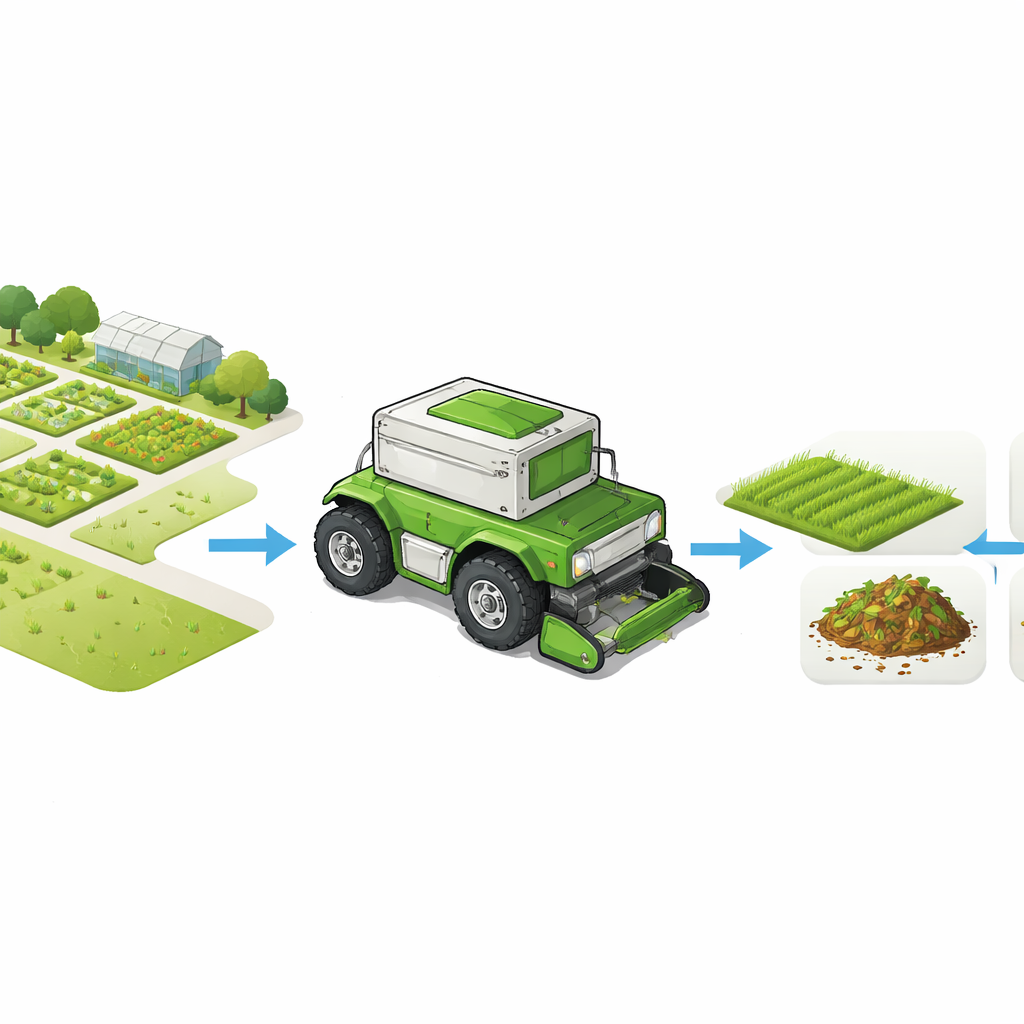
Het netjes houden van gazons, parken en kleine boerderijen betekent vaak het combineren van meerdere luide, brandstofetende machines—een voor maaien, een andere voor het verzamelen van maaisel, een derde voor het versnipperen van bladeren en weer een andere voor het zaaien. Dit artikel beschrijft een compacte elektrische robot die al deze klussen wil samenbrengen in één modulair, zelfrijdend hulpmiddel, ontworpen voor campussen, landgoederen en kleine landbouwpercelen. Door een paar snelwisselopzetten te verwisselen, kan hetzelfde vierwielige voertuig gras maaien, plantaardig afval verzamelen en vergruizen, en daarna terugkeren om zaden met nauwkeurige afstand te planten, allemaal op één accupakket en met eigen padplanning over het veld.
Één robot voor veel buitenklussen
De kern van de studie is een hoekige vierwielaangedreven robot met onafhankelijke besturing van de linker- en rechterwielparen, waardoor hij ter plaatse kan draaien en in nauwe hoeken kan manoeuvreren. De ontwerpers hebben de machine opgesplitst in twee gestapelde eenheden: een robuuste ondervloer die de aandrijfmotoren, elektronica en een krachtige ventilator huisvest, en een bovenste kast die dienstdoet als grote opvangbak. Op dit gedeelde chassis monteren ze snelwissel-gereedschapshoofden—een hoog-koppel grastrimmer voor levend gazon, een vergruizer voor droge bladeren en licht afval, en een achteraan bevestigd zaaigoed-aanhangwagentje. Transparante zijpanelen laten operators binnenin kijken voor inspectie en onderhoud, en veiligheidsvoorzieningen zoals afgeschermde messen en stootranden zijn vanaf het begin ingebouwd.
Hoe maaien, verzamelen en zaaien worden gecombineerd
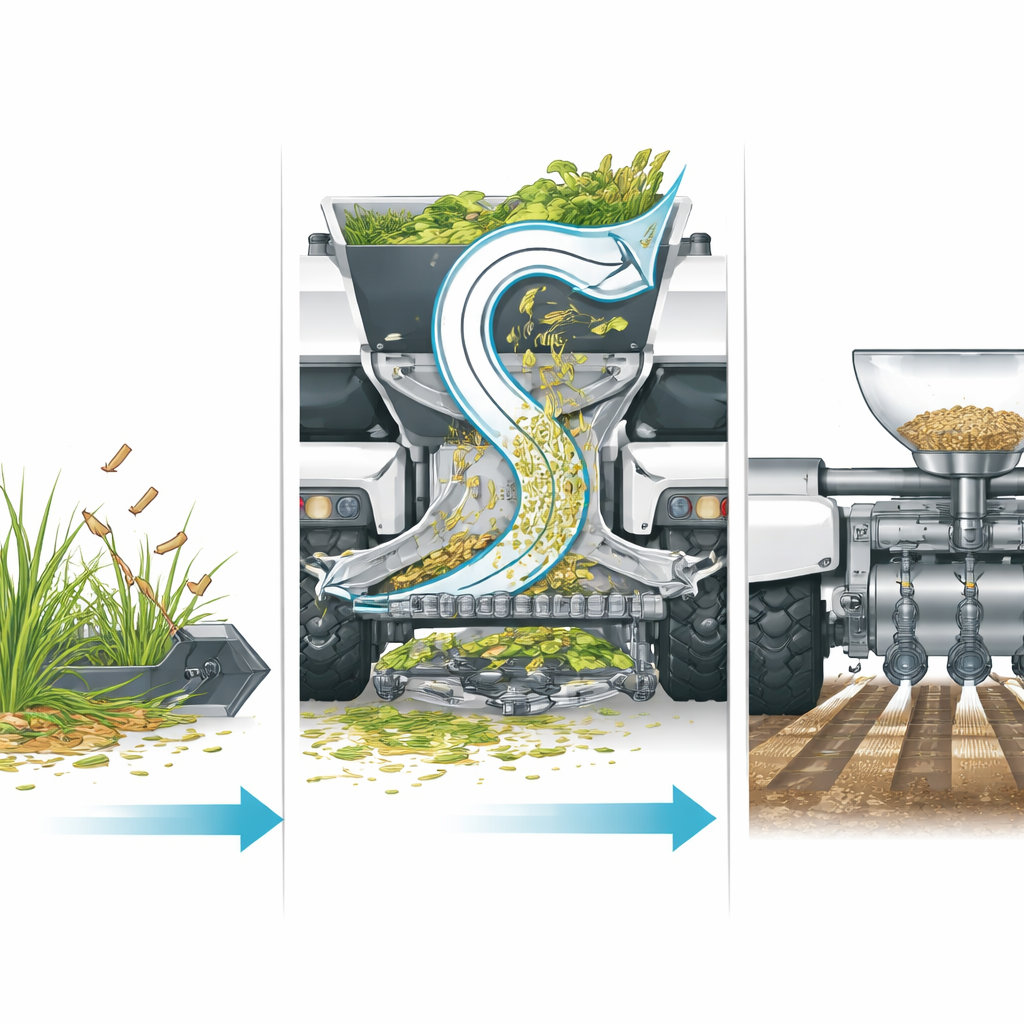
Tijdens het maaien snijdt de frontale trimmer het gras terwijl een halfronde stootrand stenen en puin van het blad afbuigt. Een S-vormige luchtkanaal en ventilator zuigen vervolgens het gehakte maaisel van de grond en tillen het in de bovenste opvangkamer, waardoor handmatig harken minder nodig is. Voor opruimwerk in droge seizoenen kan de trimmer worden vervangen door een vergruizer die gevallen bladeren en licht afval versnijdt voor eenvoudiger verwerking. Als het tijd is om te zaaien, wordt een klein wagentje aan de achterkoppeling bevestigd. Zaden stromen vanuit een bunker naar een roterende trommel met gelijkmatig verdeelde holtes, en vallen vervolgens door buisjes in ondiepe voren in de grond voordat een achterwaartse klep de groef sluit. Door de trommelsnelheid te koppelen aan de rijsnelheid van de robot, houdt het systeem de zaaiafstand consistent zelfs wanneer de robot versnelt of vertraagt.
De robot leren zien en zijn werkzaamheden plannen
Het platform is ontworpen om autonoom te opereren, gestuurd door een combinatie van sensoren en onboard beslissingssoftware. Een camera, laserscanner en bewegingssensoren voeden een schattingsmodule die de signalen fuseert en de positie van de robot bijhoudt met slechts enkele centimeters foutmarge. Daarbovenop kiest een missiemanager tussen maaien, vergruizen en zaaien, terwijl een padplanner en bewegingscontroller vloeiende routes en wielsnelheden berekenen. Het team onderzoekt ook een cameragebaseerde methode om grashoogte uit beeldmateriaal te schatten, waarbij percelen worden geclassificeerd als zeer kort, kort, middelmatig of lang. Deze informatie kan worden gebruikt om de trimmer tijdens het werk omhoog of omlaag te stellen, onnodig diepe sneden te voorkomen en energie te besparen terwijl het gazon visueel uniform blijft.
Paden, vermogen en robuustheid testen in simulatie
In plaats van meteen hardware te bouwen, voeren de auteurs een uitgebreide reeks computergestuurde tests uit. Ze schatten maaisnelheden, verzamelingsefficiëntie en navigatienauwkeurigheid en berekenen hoe lang een 24 volt, 50 ampère-uur batterij elk takenpakket kan ondersteunen. Hun modellen suggereren dat gecombineerd maaien en vacuümverzamelen ongeveer 1,2 uur per lading kan draaien, bladvergruizing ongeveer 2 uur, en licht zaaigebruik ruwweg 8 uur. Ze vergelijken drie dekkingspatronen voor rechthoekige velden—zigzag, inwaartse spiraal en concentrische cirkels—en tonen aan dat alleen het zigzag- of “boustrophedon”-patroon betrouwbaar elk deel van een rechthoekig perceel bedekt zonder ongemaaide hoeken achter te laten. Aanvullende simulaties onderzoeken hoe goed de stootrand stenen afbuigt, hoeveel wielslip optreedt op hellingen, en hoe waarschijnlijk het is dat kleine stenen door de beschermopening glippen, met resultaten die wijzen op laag risico op schade en acceptabele tractie op hellingen tot ongeveer 25 graden.
De sterkte van het frame en de opzetten controleren
Om zeker te zijn dat de robotbehuizing echte gebruiksbelasting aankan, voert het team eindige-elementenanalyse uit—digitale spanningsproeven—op zowel het stalen basisframe als de lichtere aluminium bovenstructuur, en ook op de zaaimiddelassemblage. Onder representatieve statische belastingen zijn de berekende spanningen duizenden keren lager dan de vloeigrens van de materialen, wat veiligheidsfactoren groter dan 15 oplevert voor beide metalen structuren. In praktische termen betekent dit dat het ontwerp substantieel overgedimensioneerd is voor de dagelijkse krachten die tijdens maaien, trekken en hanteren worden verwacht, waardoor er ruime marge is voor zwaardere opzetten of incidentele stoten en schokken. De studie schetst ook hoe verzameld maaisel kan worden omgezet in compost volgens gangbare recepten, waarmee robotisch terreinonderhoud gekoppeld wordt aan eenvoudige recycling van plantmateriaal ter plaatse.
Een stap richting schoner, modulair tuin- en landbouwonderhoud
Al met al betoogt het artikel dat één accu-aangedreven robot met verwisselbare modules een kleine vloot gespecialiseerde machines kan vervangen voor maaien, verzamelen, versnipperen en zaaien in bescheiden buitenruimtes. Hoewel alle resultaten uit simulatie komen en echte veldproeven nog moeten plaatsvinden, suggereren de bevindingen dat het voorgestelde vierwielplatform efficiënt kan werken, velden volledig kan dekken met goed gekozen paden, stabiel blijft op typische hellingen en structureel veilig blijft onder belasting. Door modulaire mechanica te koppelen aan basale machinevisie en zorgvuldige energiebegroting—en door te plannen om de verzamelde biomassa te composteren—wijst het werk op schoner, flexibeler en duurzamer onderhoud van gazons en kleine boerderijen.
Bronvermelding: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Trefwoorden: autonome landbouwrobot, gazon- en veldonderhoud, precisie zaaien, coverage path planning, composteren van grasresten