Clear Sky Science · ar
روبوت زراعي رباعي الدفع معياري للقص والجمع والبذر الدقيق: التصميم والتقييم القائم على المحاكاة
آلات أذكى للمساحات الخضراء اليومية
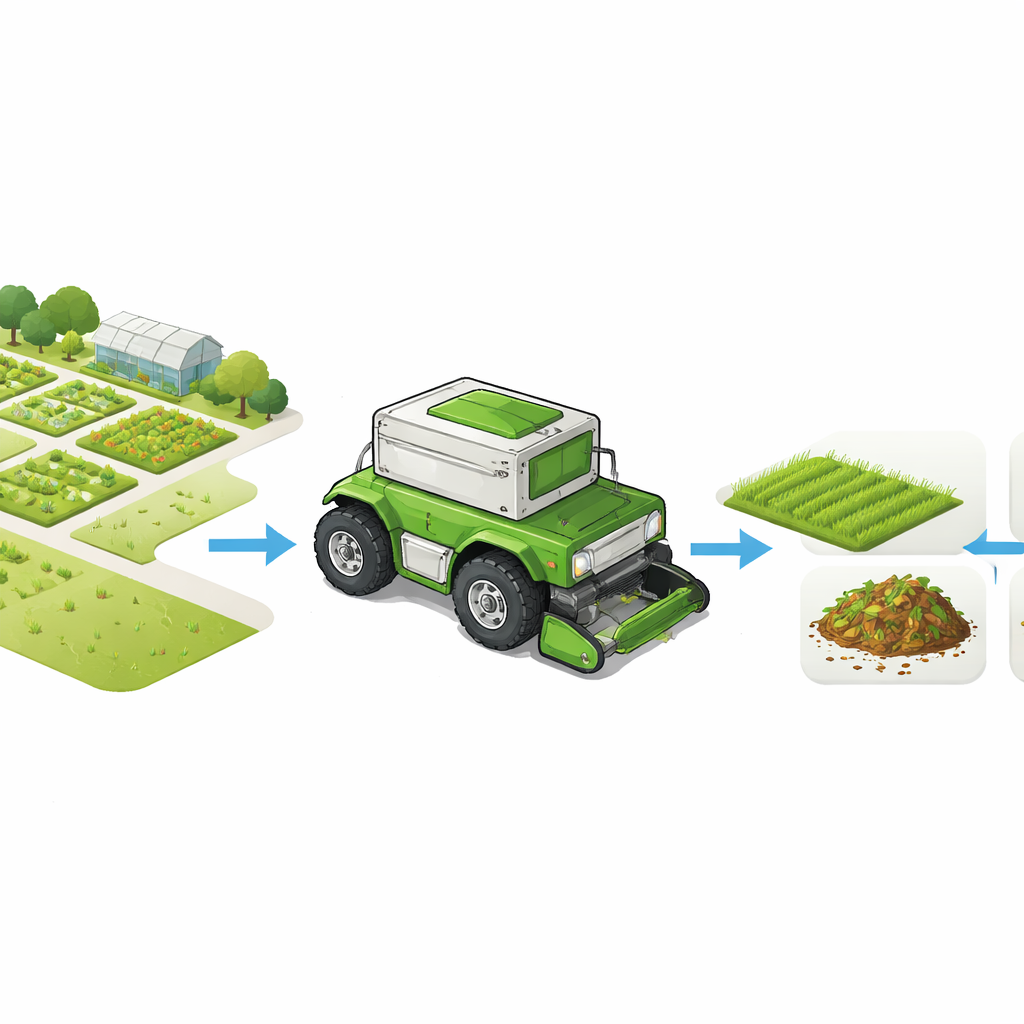
الحفاظ على المروج والحدائق والمزارع الصغيرة مرتبة عادةً يتطلب التنسيق بين عدة آلات صاخبة وتستهلك الوقود—آلة لجز العشب، وأخرى لجمع القصاصات، وثالثة لتفتيت الأوراق، وآلة إضافية لزراعة البذور. يصف هذا البحث روبوتًا كهربائيًا مدمجًا يهدف إلى دمج كل تلك المهام في مساعد معياري يقود نفسه، مصمم للحرم الجامعي والقصور والقطع الزراعية الصغيرة. عبر تبديل عدد من الملحقات سريعة الفك، يمكن للجهاز الرباعي العجلات نفسه أن يقطع العشب، ويجمع ويطحن نفايات النباتات، ثم يعود لزرع البذور بمسافات دقيقة، كل ذلك أثناء العمل ببطارية واحدة ومخطط لمساره عبر الحقل.
روبوت واحد للعديد من الأعمال الخارجية
في قلب الدراسة روبوت صندوقي رباعي الدفع مع تحكم مستقل في أزواج العجلات اليسرى واليمنى، ما يتيح له الدوران في المكان والمناورة في الزوايا الضيقة. قسم المصممون الجهاز إلى وحدتين مكدستين: منصة سفلية متينة تحمل محركات الدفع والإلكترونيات ومروّحًا قويًا، وصندوق علوي يعمل كحاوية تجميع كبيرة. على هذا الشاسی المشترك يركبون رؤوس أدوات سريعة الفك—قاطع عشب عالي العزم للعشب الحي، ومطحنة لأوراق الشجر الجافة والحطام الخفيف، ومقطورة خلفية موزعة للبذور. تسمح الألواح الجانبية الشفافة للمشغلين برؤية الداخل للفحص والصيانة، ومزايا السلامة مثل الشفرات المحمية والصدمات مدمجة منذ البداية.
كيفية دمج القص والجمع والبذر
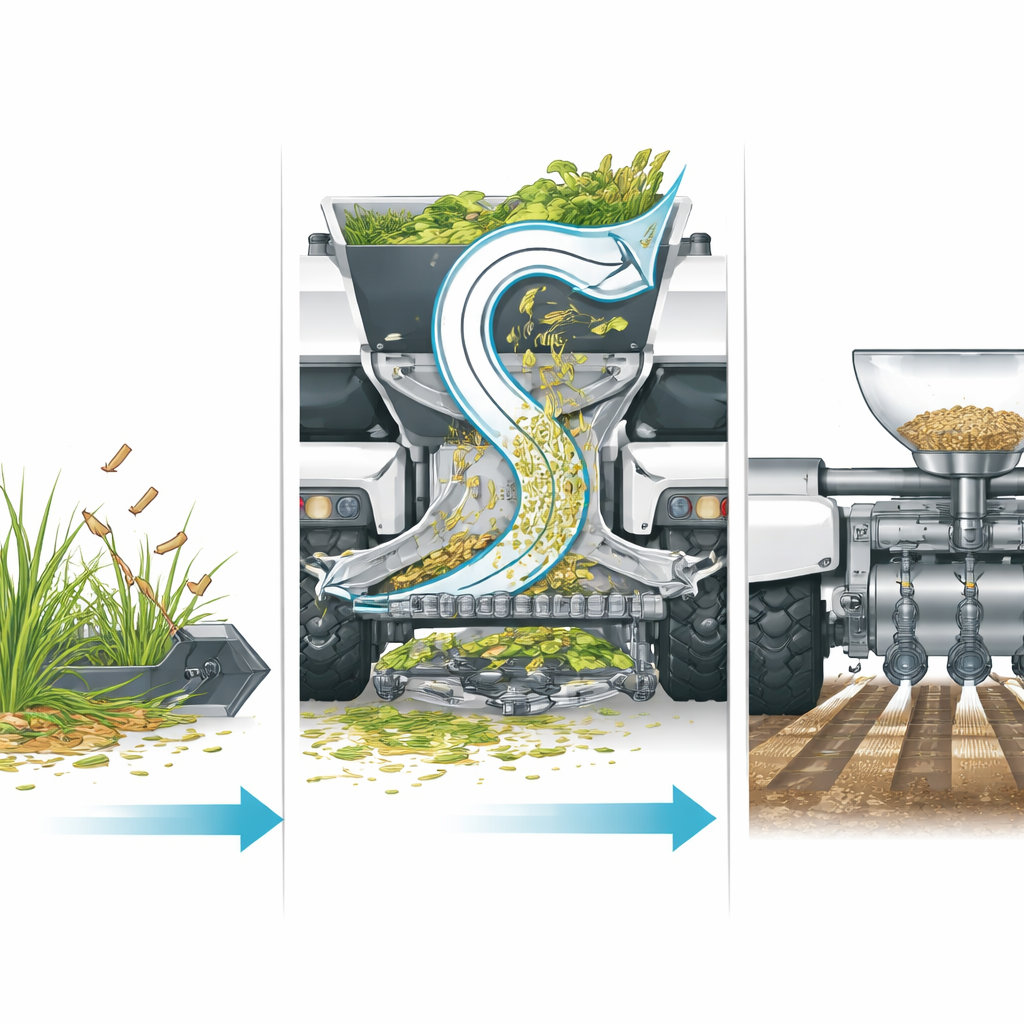
أثناء الجزّ، يقطع القاطع الأمامي العشب بينما تعمل مصدّ شبه دائري على إبعاد الحجارة والحطام عن الشفرة. ثم يمتص مجرى هوائي على شكل حرف S والمروّح القصاصات المقطوعة من الأرض ويرفعها إلى حجرة التجميع العلوية، مما يقلل الحاجة إلى الكشط اليدوي. لتنظيف المواسم الجافة، يمكن استبدال القاطع بوحدة مطحنة تمزق الأوراق المتساقطة والنفايات الخفيفة لتسهيل التعامل معها. عندما يحين وقت الزراعة، تُركب مقطورة صغيرة على الخطاف الخلفي. تتدفق البذور من مخزن إلى أسطوانة دوارة ذات تجاويف متباعدة بالتساوي، ثم تسقط عبر أنابيب في أخاديد ضحلة تُفتح في التربة قبل أن تُغلق شريحة خلفية الأخدود. بربط سرعة الأسطوانة بسرعة تحرك الروبوت، تحافظ المنظومة على تباعد البذور متسقًا حتى عندما يسرّع الروبوت أو يبطئ.
تعليم الروبوت على الرؤية وتخطيط العمل
صُمم المنصّة لتعمل بصورة مستقلة، موجهة بتوليفة من المستشعرات وبرمجيات قرار محلية. تغذي كاميرا وماسح ليزري ومستشعرات الحركة بيانات إلى وحدة تقدير تدمج الإشارات وتتتبع موقع الروبوت بخطأ لا يتجاوز بضعة سنتيمترات. فوق ذلك، يختار مدير المهمة بين مهام القص والطحن والبذر، بينما يحسب مخطط المسار ومتحكم الحركة طرقًا سلسة وسرعات للعجلات. تستكشف الفريق أيضًا طريقة قائمة على الكاميرا لتقدير ارتفاع العشب من الصور، مصنفة الرقع على أنها قصيرة جدًا، قصيرة، متوسطة، أو طويلة. يمكن استخدام هذه المعلومات لرفع أو خفض القاطع أثناء الحركة، ما يمنع القص العميق غير الضروري ويوفر الطاقة مع الحفاظ على مظهر متناسق للمروج.
اختبار المسارات والطاقة والمتانة بالمحاكاة
بدلاً من بناء الأجهزة فورًا، أجري المؤلفون مجموعة مفصلة من الاختبارات الحاسوبية. قدروا معدلات القص، وكفاءة الجمع، ودقة الملاحة، وحسبوا مدة تشغيل بطارية 24 فولت، 50 أمبير-ساعة لكل مهمة. تشير نماذجهم إلى أن الجزّ مع الجمع بالمكنسة يمكن أن يعمل حوالي 1.2 ساعة لكل شحنة، وطحن الأوراق لحوالي ساعتين، والبذر الخفيف لحوالي 8 ساعات. قارنوا ثلاثة أنماط للتغطية لحقول مستطيلة—الزجزاج، الحلزون الداخلي، والدوائر المتحدة المركز—وأظهروا أن نمط الزجزاج أو "البوستروفيدون" هو الوحيد الذي يغطّي بثبات كل جزء من قطعة مستطيلة دون ترك زوايا غير مقطوعة. تفحص محاكيات إضافية مدى فاعلية المصد في إبعاد الحجارة، ومقدار انزلاق العجلات على المنحدرات، ومدى احتمال تسرب الصخور الصغيرة من فتحة الحماية، مع نتائج تشير إلى مخاطر منخفضة للتلف وقوة جر مقبولة على ميول تصل حتى حوالي 25 درجة.
التحقق من قوة الإطار والملحقات
للتأكد من أن هيكل الروبوت يستطيع تحمل الاستخدام الواقعي، أجرت الفريق تحليلات العناصر المنتهية—اختبارات ضغط رقمية—على كل من الإطار السفلي الفولاذي والهيكل العلوي الألمنيومي الأخف، وكذلك على مجموعة موزع البذور. تحت أحمال ثابتة تمثيلية، كانت الإجهادات المحسوبة أقل بآلاف المرات من حدود انسياب المواد، مما أعطى عوامل أمان أكبر من 15 لكل من الهياكل المعدنية. عمليًا، يعني ذلك أن التصميم مبالغ في التحمل بالنسبة للقوى اليومية المتوقعة أثناء الجز والسحب والمناولة، مما يترك هامشًا كبيرًا للملحقات الأثقل أو الصدمات العرضية. كما ترسم الدراسة كيف يمكن تحويل القصاصات المجمعة إلى سماد عبر وصفات قياسية، ربطًا بين صيانة المساحات بالروبوت وإعادة تدوير المواد النباتية في الموقع.
خطوة نحو رعاية الفناء والمزرعة أنظف وأكثر معيارية
بشكل عام، يجادل البحث بأن روبوتًا واحدًا يعمل بالبطارية ويتميز بوحدات قابلة للتبديل يمكنه استبدال أسطول صغير من الآلات المتخصصة للقطع والجمع والتفتيت والبذر في المساحات الخارجية متوسطة الحجم. على الرغم من أن كل النتائج مستمدة من المحاكاة ولا تزال التجارب الواقعية في الانتظار، تشير النتائج إلى أن المنصة الرباعية المقترحة تستطيع العمل بكفاءة، وتغطية الحقول بالكامل بمسارات مختارة جيدًا، والبقاء مستقرة على المنحدرات النموذجية، والحفاظ على سلامة هيكلية تحت الحمل. من خلال الجمع بين ميكانيكا معيارية ورؤية آلية أساسية وإدارة طاقة متأنية—والتخطيط لتحويل الكتلة الحيوية المجمعة إلى سماد—يشير العمل إلى رعاية أنظف وأكثر مرونة واستدامة للمروج والمزارع الصغيرة.
الاستشهاد: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
الكلمات المفتاحية: روبوت زراعي مستقل, صيانة المروج والحقول, البذر الدقيق, تخطيط مسار التغطية, تحويل قصاصات العشب إلى سماد