Clear Sky Science · ru
Модульный 4WD сельскохозяйственный робот для скашивания, сбора и точной посевки: конструкция и оценка на основе моделирования
Более умные машины для повседневных зеленых зон
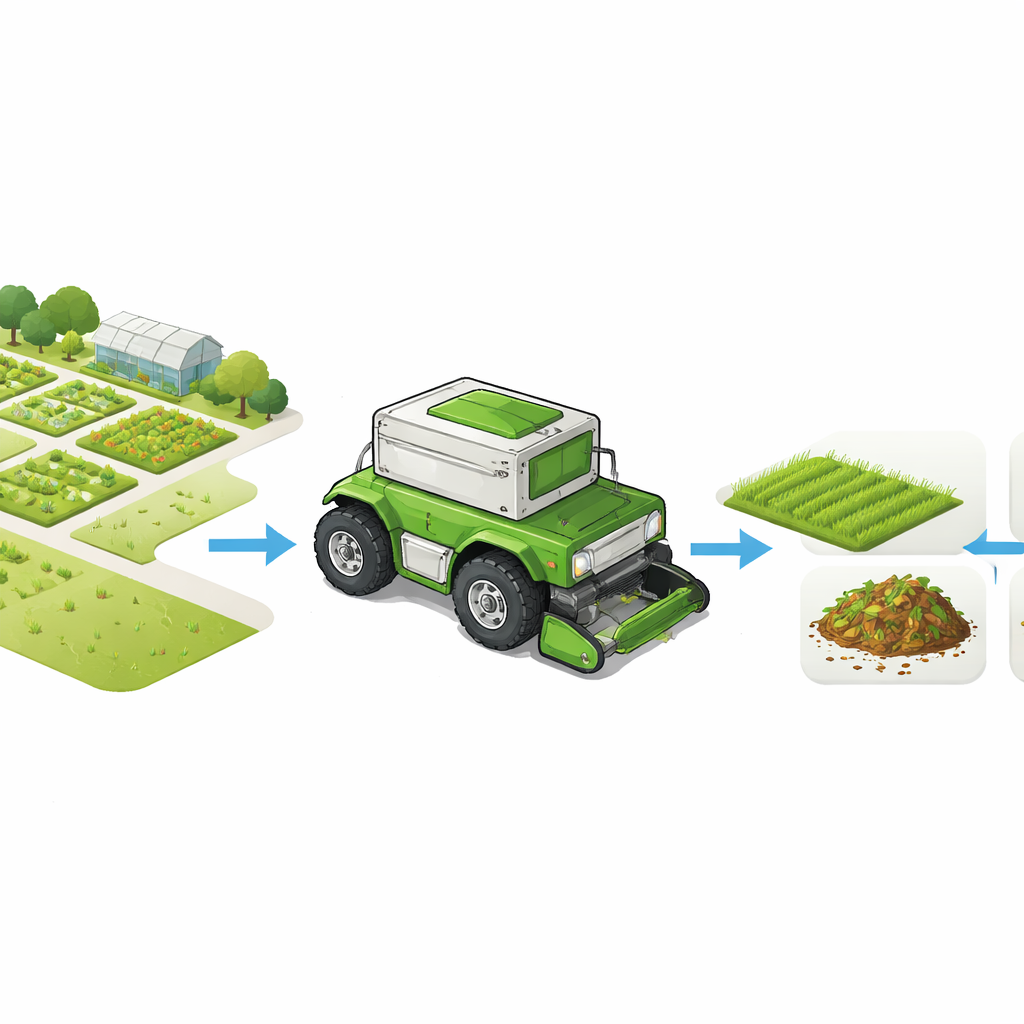
Поддержание газонов, парков и небольших ферм в порядке обычно требует нескольких громких и прожорливых машин — одна для кошения, другая для сбора обрезков, третья для дробления листьев и еще одна для посева. В этой статье описывается компактный электрический робот, который стремится объединить все эти задачи в одном модульном самоходном помощнике, предназначенном для кампусов, усадеб и небольших сельскохозяйственных участков. Меняя несколько съемных насадок, та же четырехколесная платформа может стричь траву, собирать и дробить растительные отходы, а затем возвращаться для посева семян с точным шагом, работая от одного аккумулятора и самостоятельно планируя маршрут по полю.
Один робот для множества наружных работ
В основе исследования — угловатый робот с четырьмя ведущими колесами и раздельным управлением парами левых и правых колес, что позволяет ему поворачиваться на месте и маневрировать в узких углах. Конструкторы разделили машину на два набора: прочная нижняя платформа, в которой размещены двигатели, электроника и мощный воздуходув, и верхний ящик, выполняющий роль вместительного сборного контейнера. На общий шасси устанавливаются быстросъемные рабочие органы — высокоторцевой триммер для живого газона, дробилка для сухих листьев и легкого мусора и прицеп с задней дозирующей системой для семян. Прозрачные боковые панели позволяют оператору проверять внутреннее состояние для осмотра и обслуживания, а элементы безопасности, такие как ограждения для лезвий и бамперы, заложены в конструкцию с самого начала.
Как объединены скашивание, сбор и посев
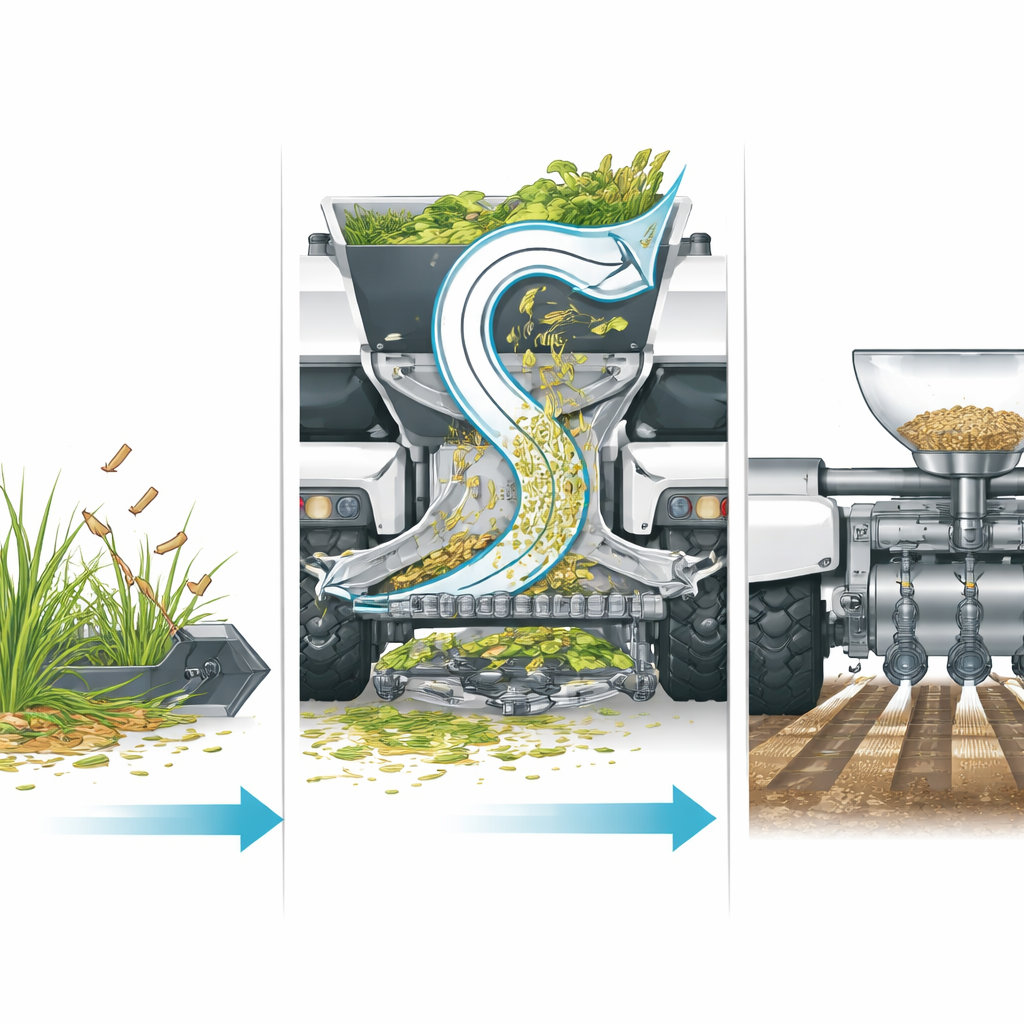
Во время кошения передний триммер срезает траву, а полуциклический бампер отводит камни и мусор от лезвия. S-образный воздуховод и воздуходув создают всасывание, поднимая скошенные обрезки с поверхности и подавая их в верхнюю сборную камеру, снижая необходимость ручного грабления. Для уборки в сухой сезон триммер можно заменить на дробильный блок, который измельчает опавшие листья и легкий мусор для облегчения обращения. При наступлении времени посева к заднему фаркопу подсоединяется небольшой прицеп. Семена из бункера поступают в вращающийся барабан с равномерно расположенными полостями, затем через трубы падают в неглубокие бороздки в почве, после чего прицепная заслонка закрывает борозду. Связывая скорость вращения барабана со скоростью движения робота, система сохраняет постоянный интервал между семенами даже при изменении скорости движения.
Обучение робота видеть и планировать работу
Платформа спроектирована для автономной работы, управляемой комбинацией датчиков и встроенного программного обеспечения принятия решений. Камера, лазерный сканер и датчики движения подают данные в модуль оценки, который объединяет сигналы и отслеживает положение робота с погрешностью всего в несколько сантиметров. Поверх этого менеджер миссий выбирает между задачами скашивания, дробления и посева, а планировщик траекторий и регулятор движения вычисляют плавные маршруты и скорости колес. Команда также исследует метод определения высоты травы по изображениям с камеры, классифицируя участки как очень короткие, короткие, средние или длинные. Эта информация может использоваться для автоматического подъема или опускания триммера в реальном времени, предотвращая необоснованно глубокие срезы и экономя энергию при поддержании визуальной однородности газона.
Тестирование маршрутов, энергии и прочности в моделировании
Вместо немедленной сборки прототипа авторы проводят подробный набор компьютерных испытаний. Они оценивают производительность среза, эффективность сбора и точность навигации, а также вычисляют, как долго 24-вольтовая батарея емкостью 50 амп·ч может поддерживать каждую задачу. Модели показывают, что комбинированное кошение с вакуумным сбором может работать около 1,2 часа на одной зарядке, дробление листьев — примерно 2 часа, а легкая посевная работа — порядка 8 часов. Они сравнивают три схемы покрытия прямоугольных участков — зигзаг, внутренняя спираль и концентрические круги — и показывают, что лишь зигзагообразный или «бустрофедонный» паттерн надежно покрывает всю площадь прямоугольного участка без оставшихся нескошенных углов. Дополнительные моделирования анализируют, насколько хорошо бампер отклоняет камни, насколько велико проскальзывание колес на склонах и каков риск прохождения мелких камней через защитный зазор; результаты указывают на низкий риск повреждений и приемлемое сцепление на уклонах до примерно 25 градусов.
Проверка прочности рамы и навесного оборудования
Чтобы убедиться, что корпус робота выдержит эксплуатацию в реальных условиях, команда проводит расчеты методом конечных элементов — цифровые тесты на прочность — как для стального базового каркаса, так и для более легкой алюминиевой верхней конструкции, а также для узла дозатора семян. При представительных статических нагрузках рассчитанные напряжения в тысячи раз ниже пределов текучести материалов, что дает коэффициенты запаса прочности более 15 для обеих металлических конструкций. В практическом смысле это означает, что конструкция значительно усилена относительно ожидаемых повседневных нагрузок при кошении, буксировке и обслуживании, оставляя большой запас для более тяжелых навесов или случайных ударов и толчков. В исследовании также приведены наброски того, как собранные обрезки можно превратить в компост по стандартным рецептам, связывая роботизированное обслуживание территорий с простым перерабатыванием растительных материалов на месте.
Шаг к более чистому, модульному уходу за дворами и фермами
В целом авторы утверждают, что один батарейный робот с заменяемыми модулями может заменить небольшой парк специализированных машин для скашивания, сбора, дробления и посева на участках умеренного размера. Хотя все результаты получены в моделировании и полевые испытания еще предстоят, выводы указывают на то, что предлагаемая четырехколесная платформа может работать эффективно, полностью покрывать поля при хорошо подобранных траекториях, оставаться устойчивой на типичных склонах и сохранять структурную безопасность под нагрузкой. Сочетая модульную механику с базовым машинным зрением и тщательным учетом энергии — а также планируя компостирование собранной биомассы — работа указывает на более чистый, гибкий и устойчивый уход за газонами и малыми фермами.
Цитирование: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Ключевые слова: автономный сельскохозяйственный робот, уход за газонами и полями, точная посевка, планирование маршрута покрытия, компостирование травяных обрезков