Clear Sky Science · de
Modularer 4WD-Agrarroboter zum Schneiden, Sammeln und Präzisionssäen: Entwurf und simulationsbasierte Bewertung
Intelligentere Maschinen für alltägliche Grünflächen
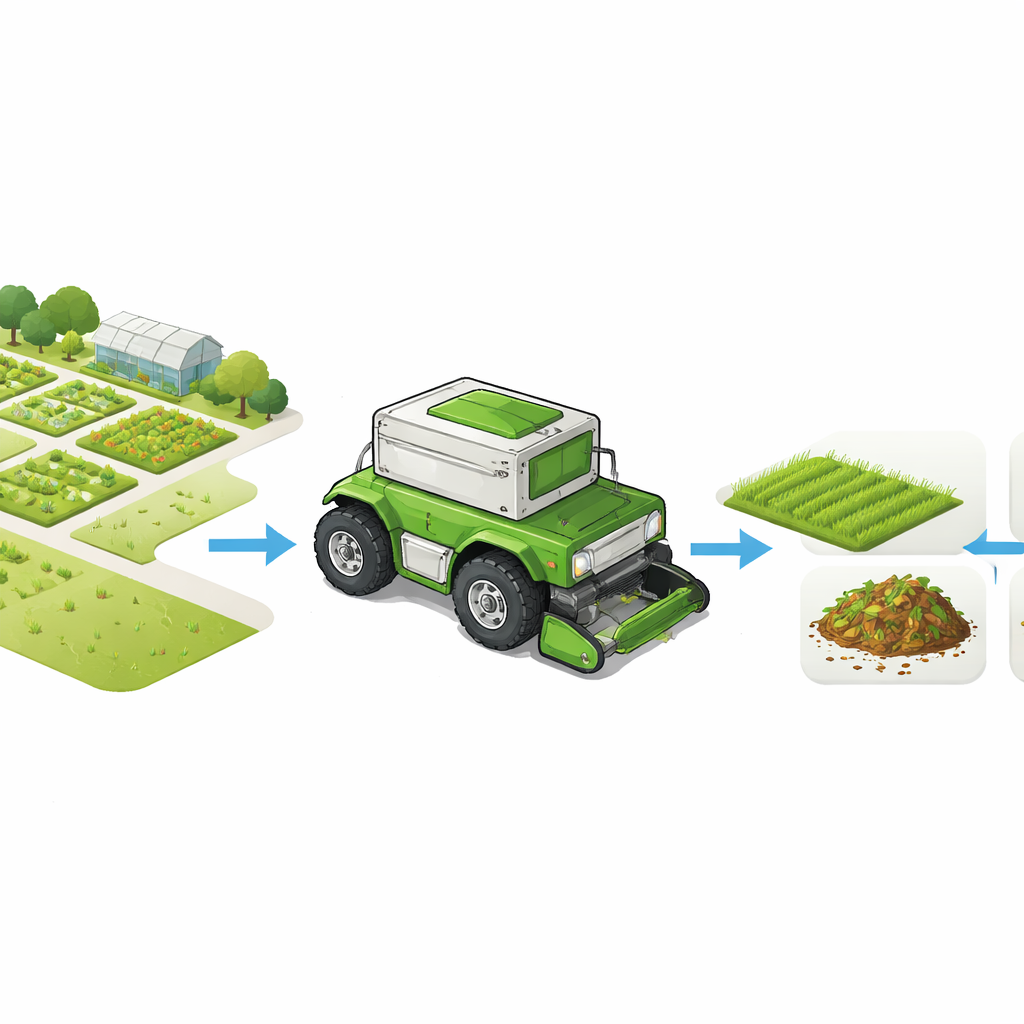
Das Instandhalten von Rasenflächen, Parks und kleineren Höfen bedeutet meist den Betrieb mehrerer lauter, kraftstoffhungriger Geräte – eines zum Mähen, ein anderes zum Sammeln des Schnittguts, ein drittes zum Zerkleinern von Laub und ein weiteres zum Aussäen. Dieser Beitrag beschreibt einen kompakten elektrischen Roboter, der all diese Aufgaben in einem modularen, selbstfahrenden Helfer vereinen soll, konzipiert für Campus-Anlagen, Anwesen und kleine landwirtschaftliche Parzellen. Durch den Wechsel weniger Schnellspann-Aufsätze kann dieselbe viergetriebene Maschine Gras schneiden, Pflanzenabfälle sammeln und zerkleinern und anschließend mit präziser Abstandshaltung Samen ausbringen – alles mit einem einzigen Akku und einer eigenständigen Routenplanung über das Feld.
Ein Roboter für viele Außenarbeiten
Kern der Studie ist ein kantiger Vierrad-Antrieb mit unabhängiger Steuerung der linken und rechten Radanordnung, wodurch das Fahrzeug auf der Stelle drehen und engere Kurven fahren kann. Die Entwickler unterteilen die Maschine in zwei gestapelte Einheiten: ein robustes Unterdeck, das die Antriebsmotoren, Elektronik und einen leistungsstarken Gebläseeinlass aufnimmt, und eine obere Kiste, die als großer Sammelbehälter dient. Auf dieses gemeinsame Chassis lassen sich Schnellwechsel-Werkzeuge montieren – ein hochdrehmomentiger Rasentrimmer für lebendes Gras, ein Zerkleinerer für trockenes Laub und leichte Rückstände sowie ein anhängbares Saatstreu-Trailer. Transparente Seitenpaneele erlauben Einsicht für Inspektion und Wartung, und Sicherheitsmerkmale wie geschützte Klingen und Stoßfänger sind von Anfang an integriert.
Wie Schneiden, Sammeln und Säen kombiniert werden
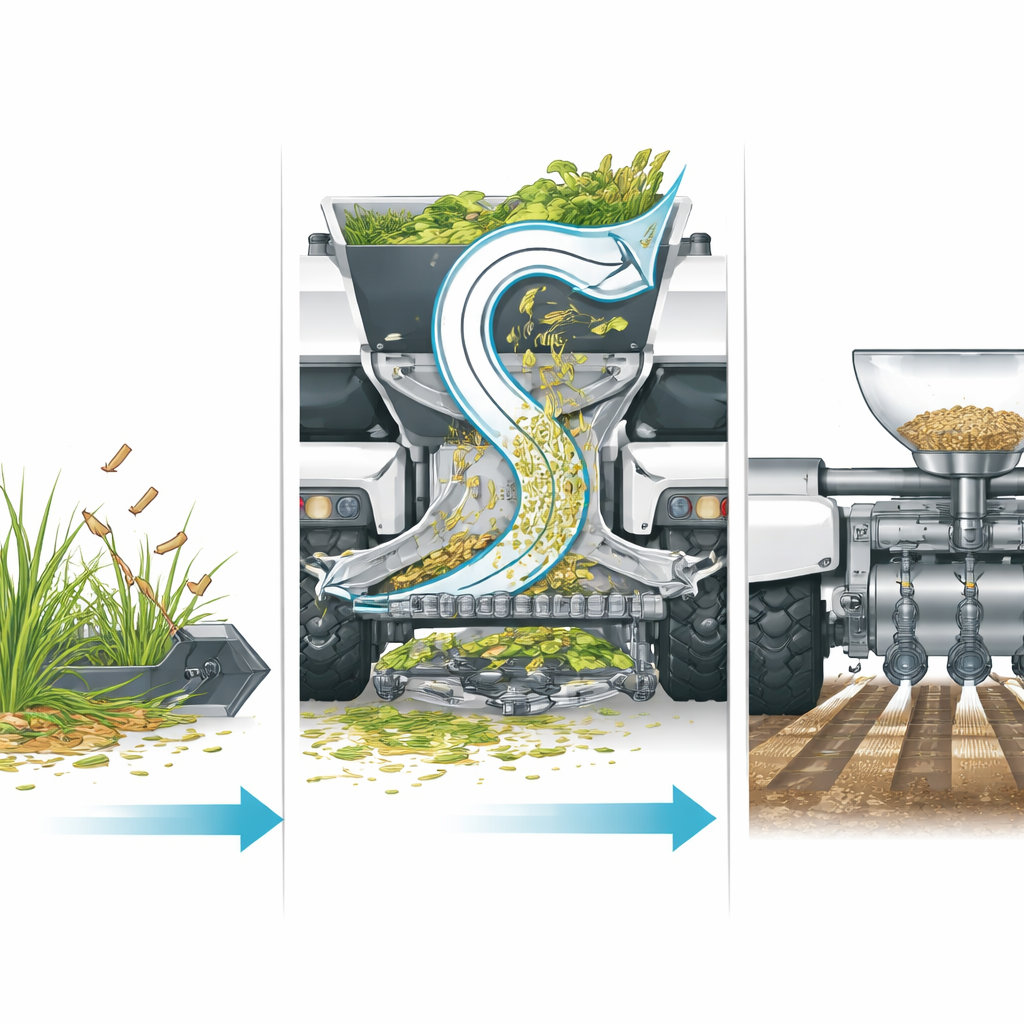
Beim Mähen schneidet der vordere Trimmer das Gras, während ein halbkreisförmiger Stoßfänger Steine und Schmutz von der Klinge weglenkt. Ein S-förmiger Luftkanal und das Gebläse saugen die zerkleinerten Halme vom Boden und heben sie in die obere Sammelkammer, wodurch manuelles Rechen weitgehend entfällt. Zur Reinigung in trockenen Jahreszeiten kann der Trimmer gegen eine Zerkleinerereinheit ausgetauscht werden, die gefallene Blätter und leichte Abfälle zerkleinert und so die Handhabung erleichtert. Zum Pflanzen koppelt sich ein kleiner Anhänger an die hintere Anhängerkupplung. Samen fließen aus einem Trichter in eine rotierende Trommel mit gleichmäßig verteilten Vertiefungen und fallen dann durch Rohrleitungen in flache Furchen, die im Boden geöffnet wurden, bevor eine nachlaufende Klappe die Rille wieder schließt. Indem die Trommeldrehzahl an die Fahrgeschwindigkeit des Roboters gekoppelt wird, bleibt der Saatabstand konstant, auch wenn der Roboter schneller oder langsamer fährt.
Dem Roboter Sehen und Planen beibringen
Die Plattform ist für den autonomen Betrieb ausgelegt und wird von einer Kombination aus Sensoren und an Bord laufender Entscheidungssoftware gesteuert. Eine Kamera, ein Laserscanner und Bewegungssensoren liefern Daten an ein Schätzmodul, das die Signale verschmilzt und die Position des Roboters auf wenige Zentimeter genau verfolgt. Darauf aufbauend wählt ein Missionsmanager zwischen Schnitt-, Zerkleinerungs- und Säaufgaben, während ein Pfadplaner und Bewegungsregler glatte Routen und Radgeschwindigkeiten berechnen. Das Team untersucht außerdem eine kamerabasierte Methode zur Schätzung der Graslänge aus Bildern, wobei Flächen als sehr kurz, kurz, mittel oder lang klassifiziert werden. Diese Information kann genutzt werden, um den Trimmer dynamisch anzuheben oder abzusenken, unnötig tiefe Schnitte zu vermeiden, Energie zu sparen und gleichzeitig ein optisch gleichmäßiges Erscheinungsbild des Rasens zu erhalten.
Testen von Wegen, Leistung und Robustheit in der Simulation
Anstatt sofort Hardware zu bauen, führen die Autoren eine ausführliche Reihe computergestützter Tests durch. Sie schätzen Schneidraten, Sammel-Effizienz und Navigationsgenauigkeit ab und berechnen, wie lange ein 24-Volt-, 50-Amperestunden-Akku jede Aufgabe unterstützen kann. Ihre Modelle legen nahe, dass kombiniertes Mähen und Vakuum-Sammeln etwa 1,2 Stunden pro Ladung laufen kann, Blattzerkleinerung rund 2 Stunden und leichtes Säen ungefähr 8 Stunden. Sie vergleichen drei Überdeckungsmuster für rechteckige Felder – Zickzack, innere Spirale und konzentrische Kreise – und zeigen, dass nur das Zickzack- oder „Boustrophedon“-Muster zuverlässig jede Stelle eines rechteckigen Feldes abdeckt, ohne ungemähte Ecken zu hinterlassen. Zusätzliche Simulationen untersuchen, wie gut der Stoßfänger Steine ablenkt, wie viel Radschlupf an Hängen auftritt und wie wahrscheinlich es ist, dass kleine Steine durch die Schutzöffnung rutschen; die Ergebnisse deuten auf ein geringes Beschädigungsrisiko und akzeptable Traktion an Neigungen bis etwa 25 Grad hin.
Prüfung der Festigkeit von Rahmen und Aufsätzen
Um sicherzustellen, dass der Roboterkörper dem praktischen Einsatz standhält, führt das Team Finite-Elemente-Analysen – digitale Belastungstests – sowohl am Stahl-Unterrahmen als auch an der leichteren Aluminium-Oberstruktur sowie an der Saatgutspender-Baugruppe durch. Unter repräsentativen statischen Lasten liegen die berechneten Spannungen um ein Vielfaches niedriger als die Streckgrenzen der Materialien, was Sicherheitsfaktoren größer als 15 für beide Metallstrukturen ergibt. Praktisch bedeutet das, dass der Entwurf deutlich überdimensioniert ist gegenüber den im Alltag erwarteten Kräften beim Mähen, Ziehen und Handling und genügend Spielraum für schwerere Aufsätze oder gelegentliche Stöße bietet. Die Studie skizziert außerdem, wie gesammelter Grasschnitt nach Standardrezepten zu Kompost verarbeitet werden könnte und verbindet damit robotische Pflege mit einfachem Vor-Ort-Recycling von Pflanzenmaterial.
Ein Schritt zu saubererer, modularer Garten- und Feldpflege
Insgesamt argumentiert die Arbeit, dass ein einzelner, batteriegetriebener Roboter mit austauschbaren Modulen eine kleine Flotte spezialisierter Maschinen zum Schneiden, Sammeln, Zerkleinern und Säen in mittelgroßen Außenbereichen ersetzen kann. Zwar beruhen alle Ergebnisse bisher auf Simulationen und Feldtests stehen noch aus, doch deuten die Befunde darauf hin, dass die vorgeschlagene Vierradplattform effizient arbeiten, Felder mit geeigneten Wegen vollständig abdecken, auf typischen Neigungen stabil bleiben und unter Last strukturell sicher sein kann. Durch die Kombination modularer Mechanik mit einfacher maschineller Sicht und sorgfältigem Energiehaushalt – und mit der Absicht, das gesammelte Biomassematerial zu kompostieren – weist die Arbeit in Richtung saubererer, flexiblerer und nachhaltigerer Pflege von Rasenflächen und kleinen landwirtschaftlichen Flächen.
Zitation: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Schlüsselwörter: autonomer Agrarroboter, Rasen- und Feldpflege, Präzisionssäen, Abdeckungswegplanung, Kompostierung von Grasschnitt