Clear Sky Science · fr
Robot agricole modulaire 4x4 pour coupe, collecte et semis de précision : conception et évaluation par simulation
Des machines plus intelligentes pour les espaces verts quotidiens
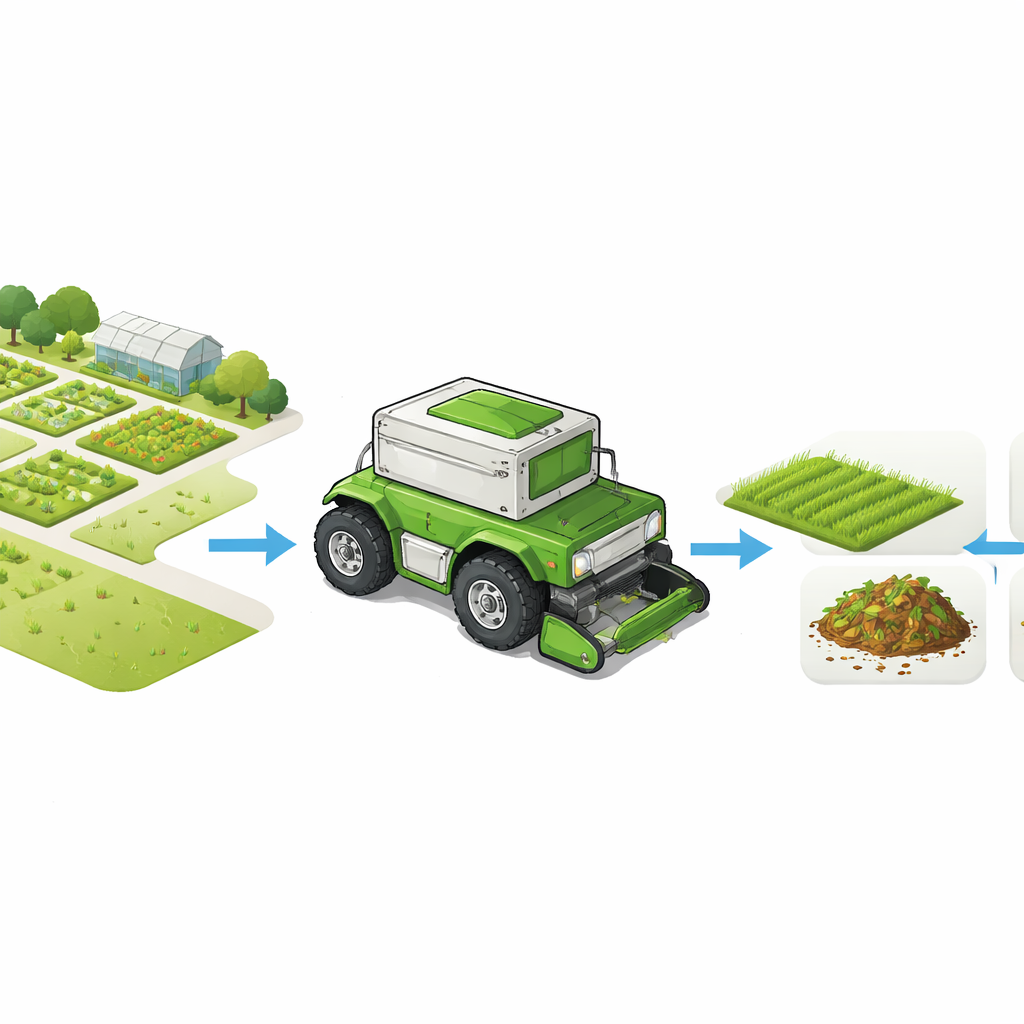
Entretenir pelouses, parcs et petites exploitations implique généralement d’utiliser plusieurs machines bruyantes et gourmandes en carburant — une pour tondre, une pour ramasser les déchets, une autre pour broyer les feuilles et encore une pour semer. Cet article décrit un robot électrique compact qui vise à regrouper toutes ces tâches en un seul assistant modulaire autonome, conçu pour les campus, les propriétés et les petites parcelles agricoles. En échangeant quelques outils à démontage rapide, la même machine quatre roues peut couper l’herbe, collecter et broyer les déchets végétaux, puis revenir pour semer avec un espacement précis, le tout alimenté par une seule batterie et en planifiant sa propre trajectoire sur le terrain.
Un robot unique pour de nombreux travaux extérieurs
Au cœur de l’étude se trouve un robot quatre roues motrices à l’allure cubique avec contrôle indépendant des paires de roues gauche et droite, lui permettant de tourner sur place et de manœuvrer dans des virages serrés. Les concepteurs ont divisé la machine en deux unités empilées : une plateforme inférieure robuste qui contient les moteurs d’entraînement, l’électronique et un souffleur puissant, et une caisse supérieure servant de grand bac de collecte. Sur ce châssis commun sont montés des outils à démontage rapide — une tondeuse à couple élevé pour le gazon vivant, un broyeur pour les feuilles sèches et les déchets légers, et une remorque arrière distributrice de graines. Des panneaux latéraux transparents permettent d’inspecter l’intérieur pour la maintenance, et des dispositifs de sécurité tels que des lames protégées et des pare-chocs sont intégrés dès la conception.
Comment coupe, collecte et semis sont combinés
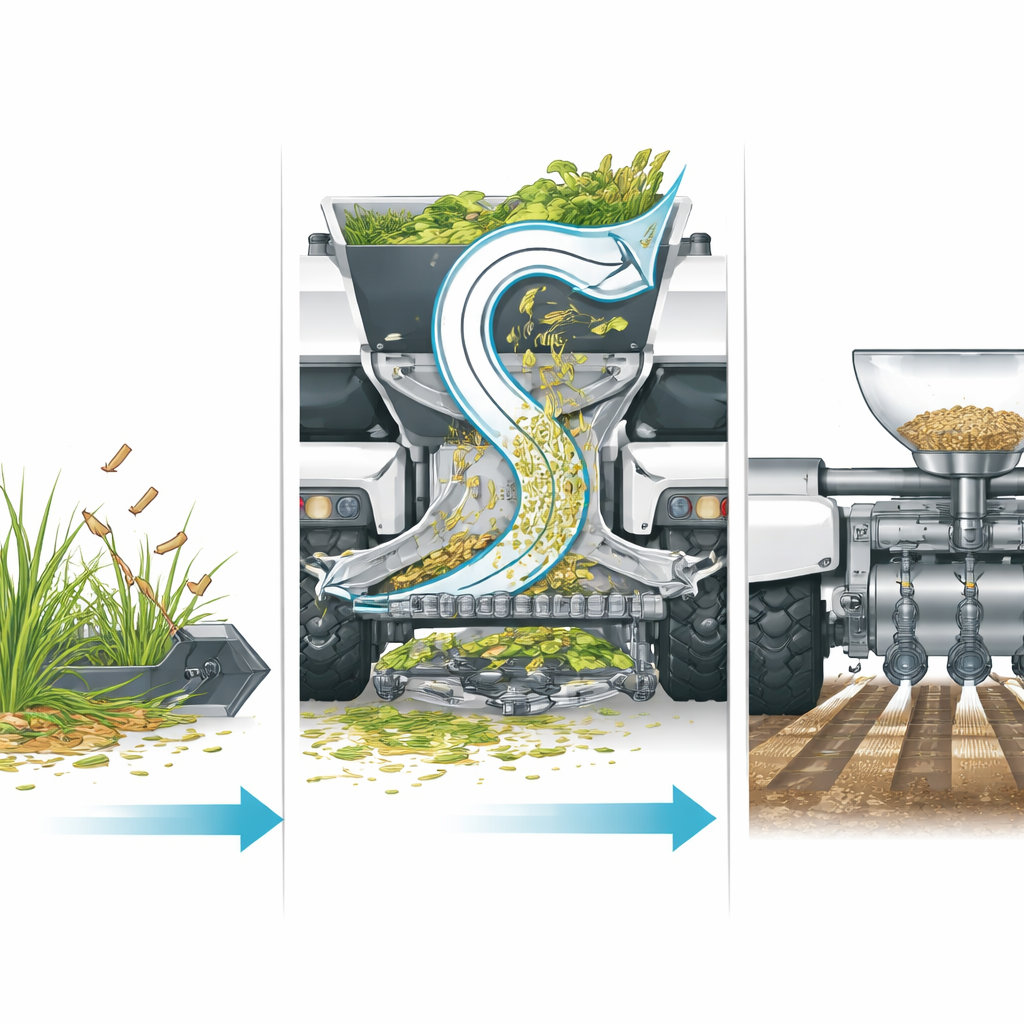
Lors de la tonte, la découpe avant du robot coupe l’herbe tandis qu’un pare-chocs semi-circulaire dévie les pierres et débris loin de la lame. Une conduite d’air en S et un souffleur aspirent ensuite les résidus hachés depuis le sol et les élèvent dans la chambre de collecte supérieure, réduisant le besoin de ratisser manuellement. Pour le nettoyage en saison sèche, la tête de coupe peut être remplacée par un broyeur qui déchiquette les feuilles tombées et les détritus légers pour un manutention plus aisée. Lorsqu’il est temps de semer, une petite remorque se raccorde à l’attelage arrière. Les graines s’écoulent d’un entonnoir vers un tambour rotatif doté de cavités espacées régulièrement, puis tombent par des tubes dans des sillons peu profonds ouverts dans le sol avant qu’une bavette suiveuse ne referme la rigole. En liant la vitesse du tambour à la vitesse de déplacement du robot, le système maintient un espacement régulier des graines, même si le robot accélère ou ralentit.
Apprendre au robot à voir et à planifier son travail
La plate-forme est conçue pour fonctionner de manière autonome, guidée par une combinaison de capteurs et d’un logiciel décisionnel embarqué. Une caméra, un scanner laser et des capteurs de mouvement alimentent un module d’estimation qui fusionne les signaux et suit la position du robot avec seulement quelques centimètres d’erreur. Par-dessus cela, un gestionnaire de mission choisit entre les tâches de coupe, broyage et semis, tandis qu’un planificateur de trajectoire et un contrôleur de mouvement calculent des routes fluides et les vitesses des roues. L’équipe explore aussi une méthode basée sur la caméra pour estimer la hauteur de l’herbe à partir d’images, classant les zones en très court, court, moyen ou long. Cette information peut servir à relever ou abaisser la tête de coupe à la volée, évitant des coupes trop profondes inutiles et économisant de l’énergie tout en maintenant une apparence uniforme du gazon.
Tester trajectoires, autonomie et robustesse en simulation
Plutôt que de construire d’emblée le matériel, les auteurs réalisent une série d’essais informatiques détaillés. Ils estiment les débits de coupe, l’efficacité de collecte et la précision de navigation, et calculent combien de temps une batterie de 24 volts et 50 ampères-heure peut soutenir chaque tâche. Leurs modèles suggèrent que la tonte combinée à la collecte par aspiration peut fonctionner environ 1,2 heure par charge, le broyage des feuilles environ 2 heures, et le semis léger environ 8 heures. Ils comparent trois motifs de couverture pour des champs rectangulaires — zigzag, spirale intérieure et cercles concentriques — et montrent que seul le motif en zigzag ou « boustrophédon » couvre de manière fiable chaque partie d’une parcelle rectangulaire sans laisser d’angles non coupés. Des simulations supplémentaires examinent l’efficacité du pare-chocs à dévier les pierres, le glissement des roues sur les pentes et la probabilité que de petits cailloux passent par l’ouverture de protection, avec des résultats indiquant un faible risque de dommages et une traction acceptable sur des inclinaisons allant jusqu’à environ 25 degrés.
Vérification de la résistance du châssis et des accessoires
Pour s’assurer que la structure du robot peut supporter une utilisation en conditions réelles, l’équipe réalise des analyses par éléments finis — tests numériques de contrainte — sur la base en acier et la structure supérieure plus légère en aluminium, ainsi que sur l’assemblage du distributeur de graines. Sous des charges statiques représentatives, les contraintes calculées sont des milliers de fois inférieures aux limites d’élasticité des matériaux, offrant des facteurs de sécurité supérieurs à 15 pour les deux structures métalliques. En termes pratiques, cela signifie que la conception est largement surdimensionnée pour les forces quotidiennes attendues lors de la tonte, du remorquage et de la manutention, laissant une marge confortable pour des accessoires plus lourds ou des chocs occasionnels. L’étude esquisse également comment les résidus collectés pourraient être transformés en compost selon des recettes standard, reliant l’entretien robotisé des espaces verts à un recyclage simple sur place de la biomasse végétale.
Un pas vers un entretien de jardin et de ferme plus propre et modulaire
Dans l’ensemble, l’article soutient qu’un unique robot alimenté par batterie et doté de modules interchangeables peut remplacer une petite flotte de machines spécialisées pour couper, collecter, broyer et semer dans des espaces extérieurs de taille modeste. Bien que tous les résultats proviennent de simulations et que des essais sur le terrain restent à réaliser, les conclusions suggèrent que la plateforme quatre roues proposée peut fonctionner efficacement, couvrir complètement les parcelles avec des trajectoires bien choisies, rester stable sur des pentes typiques et garder une sécurité structurelle sous charge. En associant une mécanique modulaire à une vision machine basique et une gestion énergétique soignée — et en prévoyant de composter la biomasse collectée — ce travail ouvre la voie à un entretien des pelouses et des petites exploitations plus propre, plus flexible et plus durable.
Citation: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Mots-clés: robot agricole autonome, entretien de pelouses et de champs, semis de précision, planification de trajectoire de couverture, compostage des tontes