Clear Sky Science · sv
Modulär 4WD jordbruksrobot för klippning, insamling och precisionssådd: design och simuleringsbaserad utvärdering
Smartare maskiner för vardagliga gröna områden
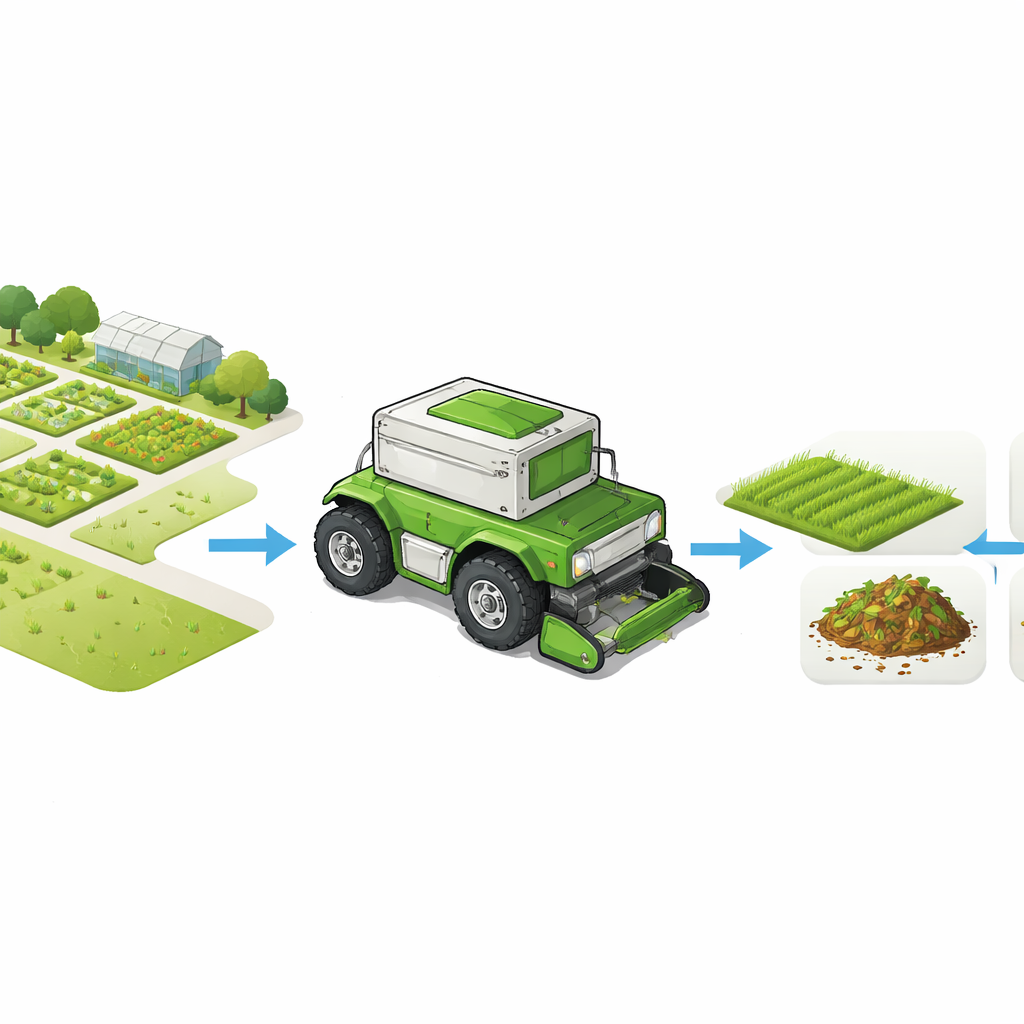
Att hålla gräsmattor, parker och små jordbruk prydliga innebär ofta att hantera flera bullriga, bränsletörstiga maskiner—en för klippning, en annan för uppsamling av klipp, en tredje för att sönderdela löv och ytterligare en för sådd. Denna artikel beskriver en kompakt elektrisk robot som syftar till att kombinera alla dessa sysslor i en modulär, självkörande hjälpare, avsedd för campus, herrgårdar och små åkerlappar. Genom att byta några snabbfästen kan samma fyrhjulsdrivna maskin klippa gräs, samla in och krossa växtavfall och sedan återvända för att plantera frön med noggrann avståndsinställning—allt medan den drivs av ett enda batteripaket och planerar sin egen färd över fältet.
En robot för många utomhusuppgifter
I centrum för studien står en lådformad fyrhjulsdriven robot med oberoende styrning av vänster och höger hjulpar, vilket gör att den kan pivotera på stället och manövrera i trånga hörn. Konstruktionsteamet delade maskinen i två staplade enheter: ett robust underrede som rymmer drivmotorer, elektronik och en kraftfull fläkt, och en övre låda som fungerar som en stor uppsamlingsbehållare. På denna gemensamma chassi monteras snabbkopplade verktygshuvuden—en högt moment grästrimmer för levande gräsmattor, en kross för torra löv och lätt skräp, samt en bakmonterad såvagn. Transparenta sidopaneler låter operatörer inspektera insidan för kontroll och underhåll, och säkerhetsfunktioner som skyddade blad och stötfångare är inbyggda från början.
Hur klippning, insamling och sådd kombineras
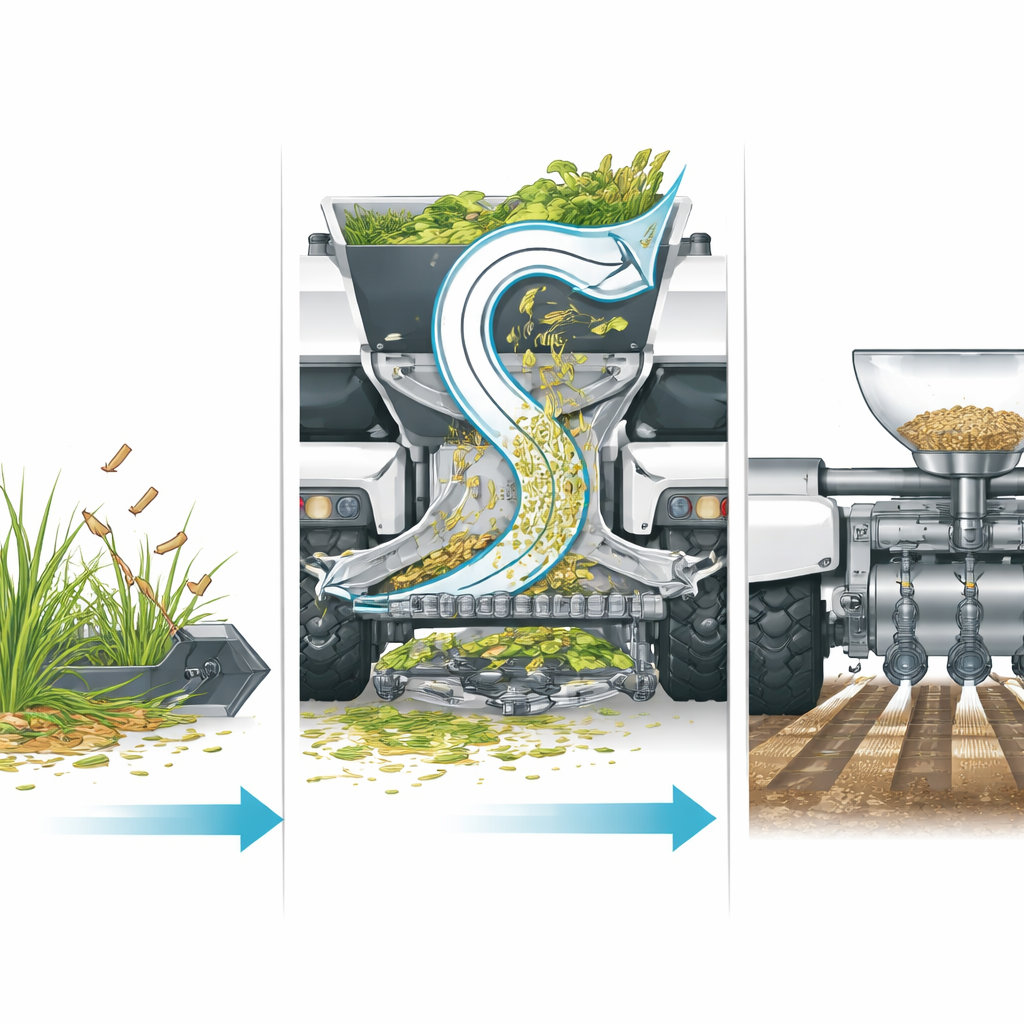
Under klippning skär robotens främre trimmer gräset medan en halvcirkelformad stötfångare avleder stenar och skräp bort från bladet. En S-formad luftkanal och fläkt suger sedan upp de hackade klippen från marken och lyfter dem in i den övre uppsamlingskammaren, vilket minskar behovet av manuell räfsning. För städning under torra perioder kan trimmern bytas ut mot en krossenhet som finfördelar fallna löv och lätt skräp för enklare hantering. När det är dags att så kopplas en liten vagn till bakre kopplingen. Frön flyter från en behållare in i en roterande trumma med jämnt fördelade fack och faller sedan genom rör ner i grunda fåror som öppnats i jorden innan en efterföljande klaff sluter fåran. Genom att länka trummans varvtal till robotens körhastighet håller systemet fröavståndet konstant även när roboten ökar eller minskar farten.
Att lära roboten att se och planera sitt arbete
Plattformen är utformad för att fungera autonomt, styrd av en kombination av sensorer och ombordbeslutande mjukvara. En kamera, laserskanner och rörelsesensorer matar data till en uppskattningsmodul som fusionerar signalerna och håller reda på robotens position med bara några centimeters felmarginal. Ovanpå detta väljer en uppdragschef mellan klipp-, kross- och såuppgifter, medan en banplanerare och rörelsekontroller beräknar mjuka rutter och hjulhastigheter. Teamet undersöker också en kamerabaserad metod för att uppskatta gräsets höjd från bilder, och klassificerar ytor som mycket kort, kort, medellång eller lång. Denna information kan användas för att höja eller sänka trimmern i farten, vilket förhindrar onödigt djupa klipp och sparar energi samtidigt som gräsmattor hålls visuellt jämna.
Test av banor, effekt och motståndskraft i simulering
Istället för att bygga hårdvara omedelbart genomför författarna en detaljerad uppsättning datorbaserade tester. De uppskattar klipphastigheter, uppsamlings effektivitet och navigationsnoggrannhet, och räknar ut hur länge ett 24 volt, 50 ampere-timmes batteri kan stödja varje uppgift. Deras modeller antyder att kombinerad gräsklippning och vakuumsamling kan köras i ungefär 1,2 timmar per laddning, lövkrossning i cirka 2 timmar och lätt sådd i ungefär 8 timmar. De jämför tre täckningsmönster för rektangulära fält—zigzag, inre spiral och koncentriska cirklar—och visar att endast zigzag- eller ”boustrophedon”-mönstret tillförlitligt täcker varje del av en rektangulär ruta utan att lämna oklippta hörn. Ytterligare simuleringar undersöker hur väl stötfångaren avleder stenar, hur mycket hjulslir som uppstår i sluttningar och hur sannolikt det är att små stenar slinker igenom skyddets öppning, med resultat som indikerar låg risk för skador och acceptabelt grepp i lutningar upp till cirka 25 grader.
Kontroll av ramens och tillbehörens hållfasthet
För att försäkra sig om att robotens kaross tål verklig användning genomför teamet finita elementanalyser—digitala hållfasthetstester—på både stålbasramen och den lättare aluminiumöverdelen, samt på frödispenserns konstruktion. Under representativa statiska laster är de beräknade spänningarna flera tusen gånger lägre än materialens flytgränser, vilket ger säkerhetsfaktorer större än 15 för båda metallstrukturerna. I praktiska termer betyder detta att designen är avsevärt överdimensionerad för de vardagliga krafter som förväntas vid klippning, släpning och hantering, och lämnar god marginal för tyngre tillbehör eller tillfälliga stötar och slag. Studien skisserar också hur uppsamlade klipp kan omvandlas till kompost enligt standardrecept, vilket kopplar robotisk parkvård till enkel platsbaserad återvinning av växtmaterial.
Steget mot renare, modulär vård av trädgårdar och gårdar
Sammanfattningsvis argumenterar artikeln för att en enda, batteridriven robot med utbytbara moduler kan ersätta en liten flotta specialiserade maskiner för klippning, insamling, sönderdelning och sådd i måttligt stora utomhusområden. Även om alla resultat kommer från simuleringar och verkliga fälttester återstår att genomföra, tyder fynden på att den föreslagna fyrhjulsplattformen kan arbeta effektivt, täcka fält fullständigt med väl valda banor, förbli stabil på typiska sluttningar och vara strukturellt säker under last. Genom att kombinera modulär mekanik med grundläggande maskinseende och noggrann energiplanering—och genom att planera för att kompostera det insamlade biomaterialet—pekar arbetet mot renare, mer flexibla och mer hållbara rutiner för skötsel av gräsmattor och små gårdar.
Citering: Kumar, A., Kamalaksha, S.A., Srividya, R. et al. Modular 4WD agricultural robot for cutting, collection, and precision seeding: design and simulation-based evaluation. Sci Rep 16, 13872 (2026). https://doi.org/10.1038/s41598-026-44388-6
Nyckelord: autonom jordbruksrobot, gräsvård och fältunderhåll, precisionssådd, täckningsplanering, kompostering av gräsklipp