Clear Sky Science · zh
基于轨迹矩阵的非圆齿轮传动最优设计用于水稻育秧盘苗抛放机构
为什么抛放小秧苗很重要
手工插秧速度慢,但对幼苗更温和,有助于它们快速恢复并健康生长。随着田地规模扩大和人工成本上升,工程师在寻找能像熟练工人一样用心且精确地栽植秧苗的机械。本文描述了一种新的栽植机构,它模仿人臂的运动,同时利用一种巧妙的齿轮系统和数学上的“运动地图”来将育秧盘苗准确且轻柔地抛放入田间。
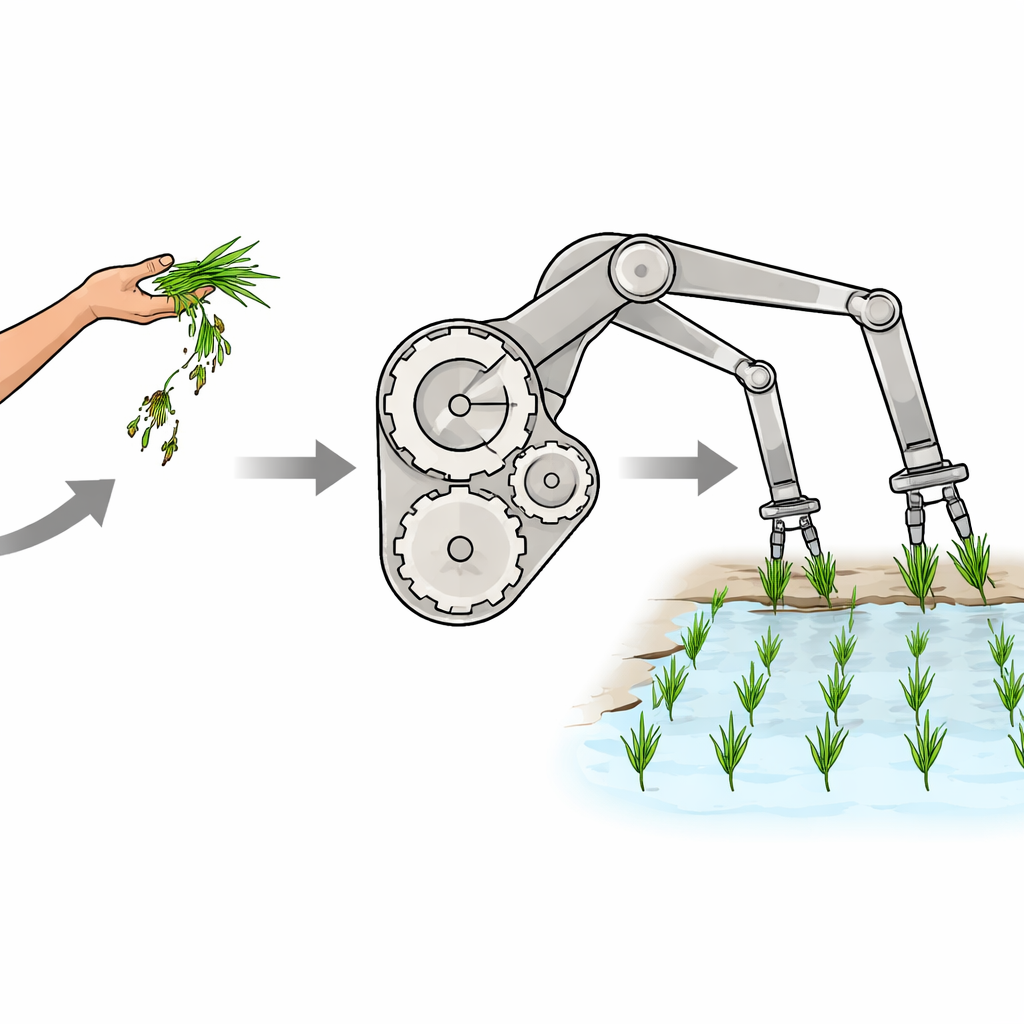
从农民之手到机械臂
研究者首先提出一个简单的问题:人在拿起并抛出一株秧苗时,手臂到底做了什么动作?他们用高速相机以每秒300帧记录了工人的手和肘部动作,并把动作分解为若干阶段:抓取秧苗、从苗盘中拔出、运输到合适位置、松手使其前进、然后回到起始位置。对这些运动轨迹进行描绘后,手沿着一个独特的环状路径移动,作者将其描述为“企鹅形”,同时手的角度变化以保持秧苗基本直立,并尽量减少弯折或扭转。
把自然运动变为机械轨迹
为了在机器中再现这种运动,团队将手臂简化为一个在肩、肘处转动的两连杆结构。从工程角度看,这是一个两关节的开放链机构,但关键思想很简单:一段从身体摆动,第二段从第一段摆动,两段共同描出与手相似的路径。挑战在于,这类系统本身有很多种运动方式,其中大多数并不适合秧苗。作者用非圆齿轮传动——轮廓非圆的齿轮—来控制关节的转动,迫使末端尽可能接近受人类启发的手部路径。
让数据引导设计
设计此类机构并非凭眼睛画曲线那么简单。设计参数有几十项,包括齿轮形状、安装方式和臂长等,这些因素相互作用复杂。为应对这一点,作者提出了一种将运动描述为“轨迹矩阵”的新方法。首先,他们对理想手部路径进行标准化——去除尺度、位置和旋转影响—然后将其叠加到网格上。包含路径的网格单元被标记出来,将运动转化为由零和一组成的模式。他们对一系列可能的机械路径做同样处理,覆盖所有可能的设置。通过比较这些矩阵,便能快速衡量任一设计与类人路径的匹配程度,并用该得分引导优化软件寻找总体最优解。
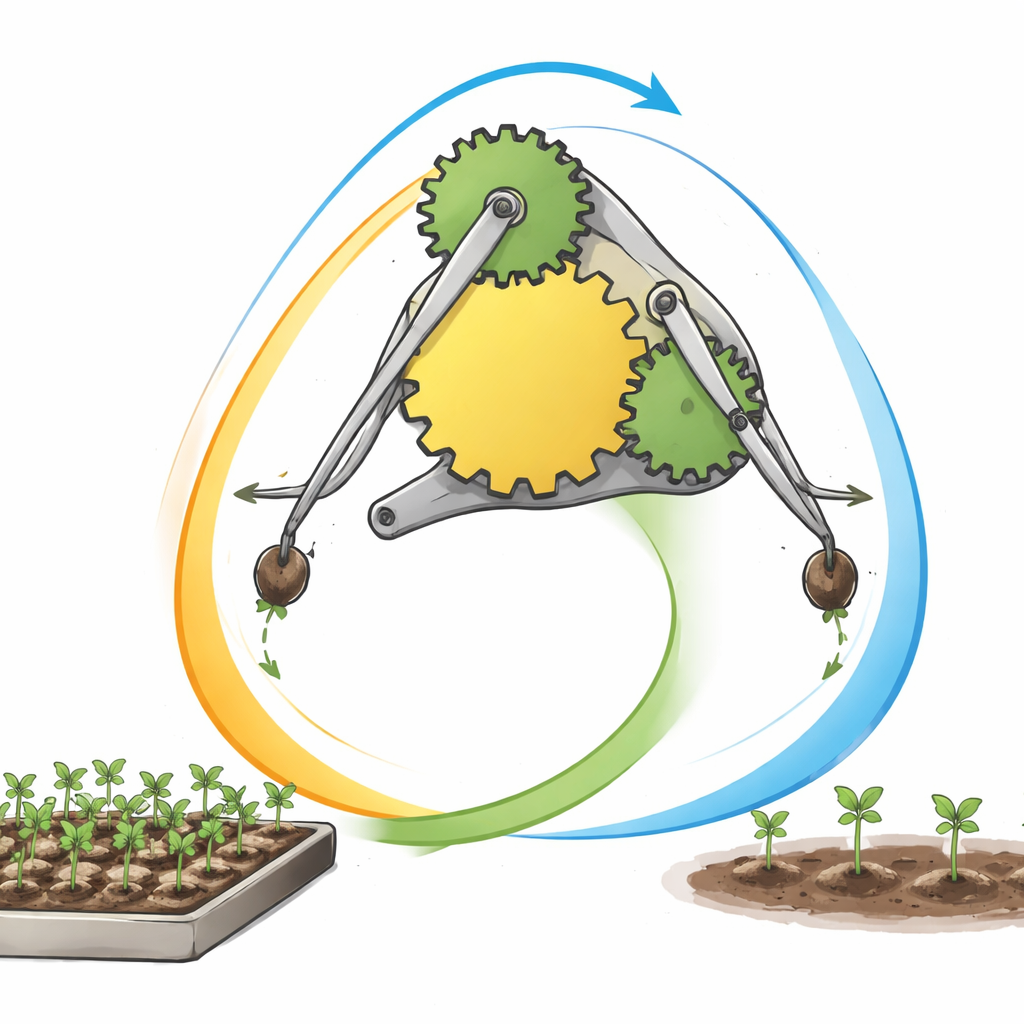
构建并测试抛放机构
掌握优化参数后,研究者设计了一个紧凑机构,由一组非圆齿轮和两条取苗臂组成。中央架和非圆太阳轮联动旋转,两个各自固定于取苗臂的非圆行星轮随之转动。当架体转动时,每条臂沿着精心设计的路径运动:在抓取并拔出秧苗时动作缓慢且近似直线,随后摆动至定植区并逐步使苗体竖直,最后将秧苗推入导向装置后返回取下一个。计算机仿真显示,臂端的路径和速度与目标轨迹高度一致,并使拔取与推进力几乎与秧苗自然生长方向对齐,从而减少弯折和折断。
从虚拟模型到真实运动
随后团队使用优化得到的齿轮轮廓和臂长构建了物理原型。他们将非圆齿轮传动、凸轮、外壳和臂装配在试验台上并以工作速度驱动机构。再次用高速相机记录实际臂的运动,并与规划路径比较。实测运动与理想轨迹高度重合,证实了新设计和轨迹矩阵优化方法的有效性。测得的取苗阶段速度适中,有利于精确性并降低损伤,而推进阶段速度较快,有助于防止秧苗被向后拖拽或扰动。
这对水稻种植者意味着什么
从实际角度看,这项工作表明可以设计出模仿熟练插秧工人那种细致、弧形手势的机械,同时其运作速度远高于人工且更稳定。通过将非圆齿轮系统与数据驱动的运动描述相结合,作者创造了一种能高效抓取、搬运并放置育秧盘苗的移栽机构,保持秧苗直立且基本不受损。对农户而言,该技术可在大田作业中带来更高的产量和更可靠的定植效果,将手工插秧的优点引入全面机械化的体系中。
引用: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
关键词: 插秧, 育秧盘苗抛放, 非圆齿轮, 轨迹优化, 农业机械