Clear Sky Science · es
Diseño óptimo guiado por matrices de trayectoria de un mecanismo lanzador de plántulas con tren de engranajes no circular para trasplante de arroz en maceta
Por qué es importante lanzar plántulas
Plantear arroz a mano es lento, pero es delicado con las plántulas y les ayuda a recuperarse rápido y a desarrollarse bien. A medida que las explotaciones agrícolas aumentan de tamaño y suben los costes de la mano de obra, los ingenieros buscan máquinas que planten plántulas de arroz con el mismo cuidado y precisión que un operario experto. Este estudio describe un nuevo mecanismo de plantación que imita el movimiento del brazo humano usando un ingenioso sistema de engranajes y una "hoja de ruta" matemática de movimiento para lanzar con precisión y suavidad las plántulas en maceta al campo.
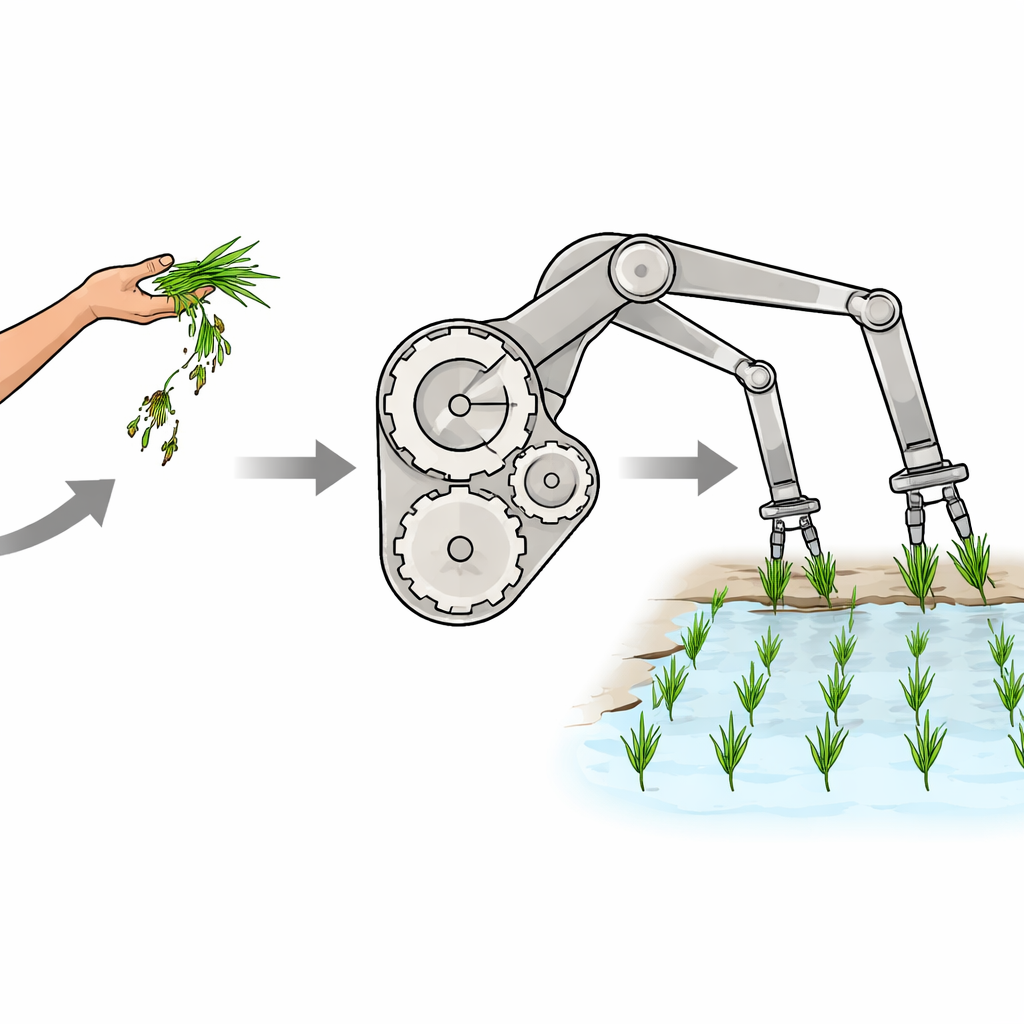
De la mano del agricultor al brazo robótico
Los investigadores empezaron con una pregunta sencilla: ¿qué hace exactamente el brazo de una persona cuando coge y lanza una plántula de arroz? Con una cámara de alta velocidad grabaron la mano y el codo de un operario a 300 fotogramas por segundo. Dividieron la acción en etapas: agarrar la plántula, extraerla de su bandeja, transportarla al lugar adecuado, soltarla para que avance, y devolver la mano al inicio. Al trazar estos movimientos, la mano siguió una trayectoria característica, en forma de lazo que los autores describen como "con forma de pingüino", con un cambio en el ángulo de la mano que mantiene la plántula mayormente erguida y minimiza doblamientos o torsiones.
Convertir el movimiento natural en una trayectoria de máquina
Para capturar este movimiento en una máquina, el equipo modeló el brazo como una estructura simple de dos eslabones que pivota en el hombro y el codo. En términos de ingeniería, se trata de un mecanismo en cadena abierta de dos articulaciones, pero la idea clave es sencilla: un segmento oscila desde el cuerpo y el segundo segmento oscila desde el primero, trazando juntos la misma clase de trayectoria que sigue la mano. El desafío es que, si queda libre, ese sistema puede moverse de muchas formas, la mayoría inapropiadas para las plántulas. Los autores resolvieron esto usando un tren de engranajes no circular: engranajes cuyos perfiles no son redondos, para controlar cómo giran las articulaciones y forzar que el extremo del brazo trace algo muy cercano a la trayectoria inspirada en el humano.
Dejar que los datos guíen el diseño
Diseñar un mecanismo así no consiste en dibujar curvas a ojo. Hay docenas de parámetros de diseño, incluyendo la forma de los engranajes, su montaje y la longitud de los brazos. Estos factores interactúan de maneras complicadas. Para abordarlo, los autores crearon una nueva forma de describir el movimiento como una "matriz de trayectoria". Primero, tomaron la trayectoria ideal de la mano y la estandarizaron —eliminando efectos de tamaño, posición y rotación— y luego la superpusieron a una cuadrícula. Las celdas de la cuadrícula que contenían la trayectoria se marcaron, convirtiendo el movimiento en un patrón de ceros y unos. Hicieron lo mismo para muchas trayectorias candidatas de la máquina a lo largo del rango completo de ajustes posibles. Comparando estas matrices, pudieron medir rápidamente qué tan bien coincidía cualquier diseño con la trayectoria humana y usar esa puntuación para guiar un software de optimización hacia la mejor solución global.
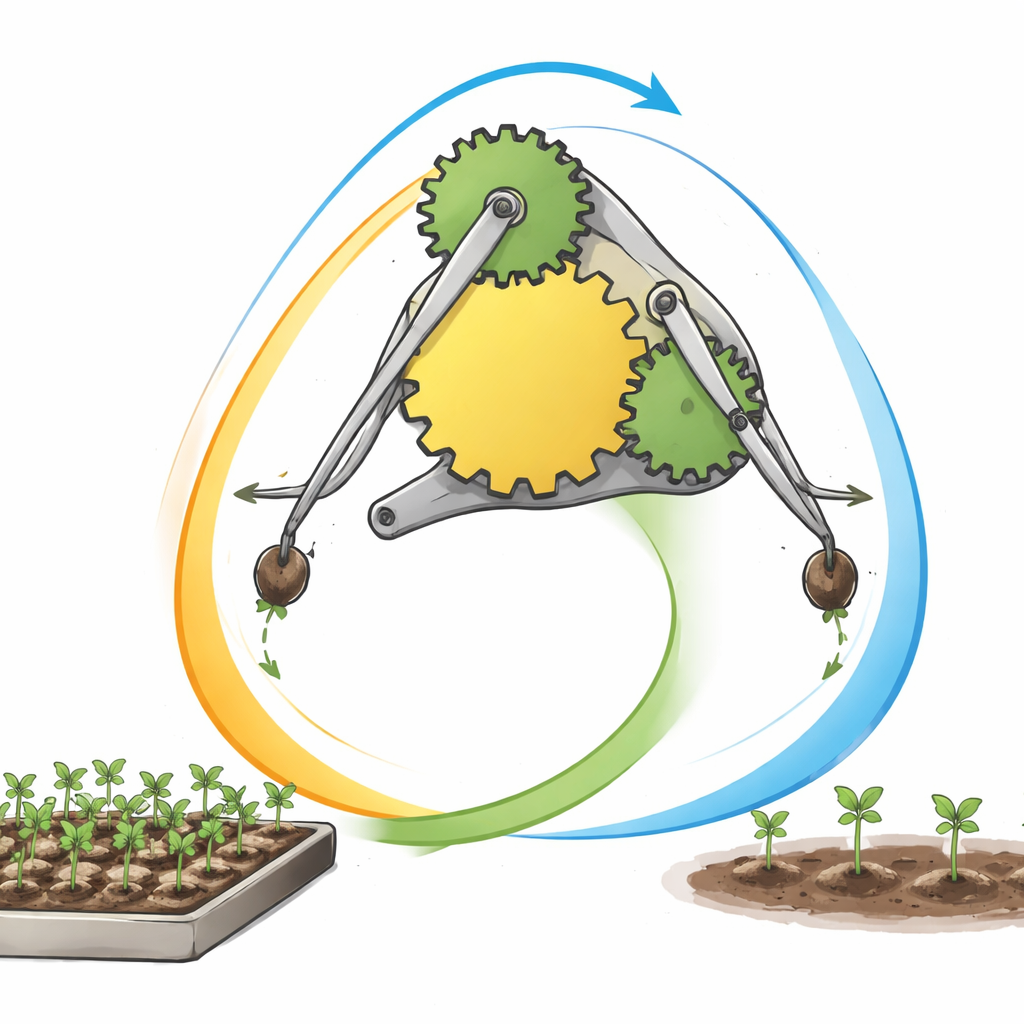
Construcción y pruebas del mecanismo lanzador
Con los parámetros optimizados en mano, los investigadores diseñaron un mecanismo compacto compuesto por un juego de engranajes no circulares y dos brazos recogedores de plántulas. El portador central y el engranaje solar no circular giran juntos, mientras que dos engranajes planetarios no circulares, cada uno fijado a un brazo recogedor, giran en respuesta. A medida que el portador gira, cada brazo sigue una trayectoria cuidadosamente perfilada: se mueve despacio y casi en línea recta mientras sujeta y tira de la plántula, luego la balancea hacia la zona de plantación mientras la va enderezando gradualmente, y finalmente la empuja dentro de un dispositivo guía antes de volver por la siguiente plántula. Las simulaciones por ordenador mostraron que la trayectoria y la velocidad en la punta del brazo coincidían estrechamente con la trayectoria objetivo y mantenían las fuerzas de tracción y empuje prácticamente alineadas con la dirección natural de crecimiento de la plántula, reduciendo doblamientos y roturas.
Del modelo virtual al movimiento real
El equipo construyó luego un prototipo físico usando los perfiles de engranajes optimizados y las dimensiones de los brazos. Montaron el tren de engranajes no circular, la leva, la carcasa y los brazos en un banco de pruebas y accionaron el mecanismo a velocidades de trabajo. Nuevamente, con una cámara de alta velocidad registraron el movimiento real del brazo y lo compararon con la trayectoria planificada. El movimiento real se superpuso fuertemente con la trayectoria ideal, confirmando que el nuevo diseño y el método de optimización mediante matriz de trayectoria funcionaban como se esperaba. Las velocidades medidas durante la recogida de plántulas fueron moderadas, lo que favoreció la precisión y redujo daños, mientras que el movimiento de empuje fue más rápido, ayudando a evitar que las plántulas se arrastraran hacia atrás o se desordenaran.
Qué significa esto para los agricultores de arroz
En términos prácticos, este trabajo demuestra que se puede diseñar una máquina para imitar el cuidadoso y curvado movimiento manual de los plantadores expertos de arroz, mientras opera mucho más rápido y con mayor consistencia que la mano de obra humana. Combinando un sistema de engranajes no circular con una descripción del movimiento basada en datos, los autores crearon un mecanismo de trasplante que puede recoger, transportar y colocar plántulas de arroz en maceta de forma eficiente, manteniéndolas erguidas y en gran medida indemnes. Para los agricultores, esta tecnología podría respaldar rendimientos más altos y una plantación más fiable en campos extensos, llevando los beneficios del trasplante manual a un sistema completamente mecanizado.
Cita: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Palabras clave: trasplante de arroz, lanzamiento de plántulas, engranajes no circulares, optimización de trayectoria, maquinaria agrícola