Clear Sky Science · sv
Spårmatrisstyrd optimal design av icke-cirkulärt kugghjulssystem för utslängningsmekanism av risplantor i krukor
Varför det spelar roll att kasta små plantor
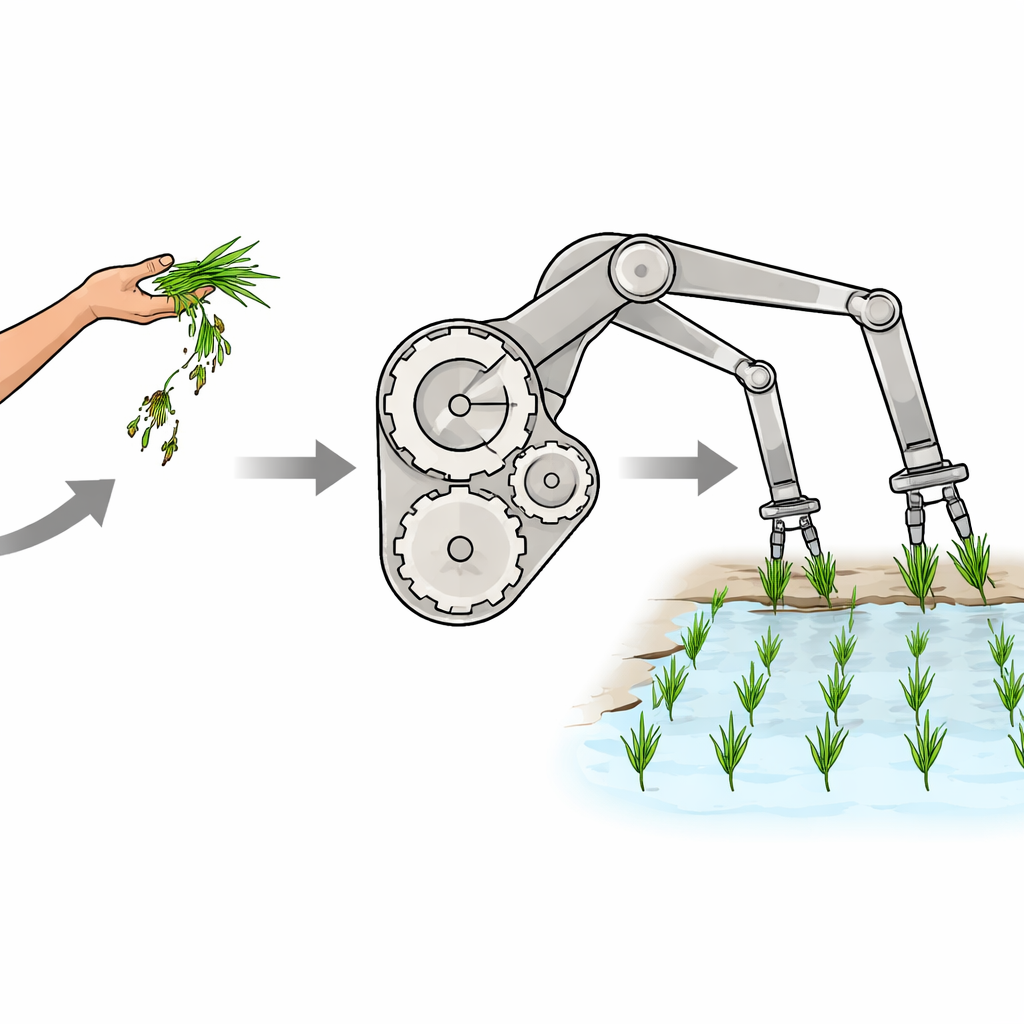
Att plantera ris för hand är långsamt, men skonsamt mot unga plantor och hjälper dem att återhämta sig snabbt och växa bra. När gårdarna växer och arbetskraftskostnaderna stiger söker ingenjörer efter maskiner som kan plantera risplantor med samma omsorg och precision som en skicklig arbetare. Denna studie beskriver en ny planteringsmekanism som imiterar människans arms rörelse genom att använda ett smart kugghjulssystem och en matematisk ”färdkarta” för rörelse för att kasta risplantor i krukor exakt och skonsamt ut i fältet.
Från bondens hand till robotarm
Forskarna började med att ställa en enkel fråga: vad gör en persons arm exakt när hen plockar upp och kastar en risplanta? Med en höghastighetskamera spelade de in handens och armbågens rörelser hos en arbetare med 300 bildrutor per sekund. De delade upp rörelsen i faser: grepp om plantan, dra den ur brickan, föra den till rätt plats, släppa så att den rör sig framåt, och sedan återföra handen till startposition. När dessa rörelser spårades följde handen en karaktäristisk, sluten bana som författarna beskriver som ”pingvin-formad”, där handens vinkel ändrades för att hålla plantan mestadels upprätt och minimera böjning eller vridning.
Att omvandla naturlig rörelse till en maskinbana
För att fånga denna rörelse i en maskin behandlade teamet armen som en enkel tvåledad struktur som roterar i axeln och armbågen. I ingenjörstermer är detta en tvåledad öppen kedjemekanism, men huvudidén är enkel: ett segment svänger från kroppen och det andra svänger från det första, och tillsammans ritar de upp samma typ av bana som handen följer. Utmaningen är att ett sådant system, om det får röra sig fritt, har många möjliga rörelser, varav de flesta inte vore bra för plantorna. Författarna löste detta genom att använda ett icke-cirkulärt kugghjulssystem—kugghjul med icke-runda konturer—för att kontrollera hur lederna roterar, vilket tvingar armens ände att spåra något mycket nära den människoinspirerade banan.
Låta data styra designen
Att utforma en sådan mekanism handlar inte bara om att rita kurvor för hand. Det finns dussintals designparametrar, inklusive hur kugghjulen formas, hur de monteras och hur långa armarna är. Dessa faktorer samverkar på komplicerade sätt. För att hantera detta skapade författarna ett nytt sätt att beskriva rörelse som en ”spårmatris”. Först tog de den idealiserade handbanan och standardiserade den—tog bort effekter av storlek, position och rotation—och överlagrade den sedan på ett rutnät. Rutceller som innehöll banan markerades, vilket förvandlade rörelsen till ett mönster av nollor och ettor. De gjorde samma sak för många kandidatmaskinbanor över hela intervallet av möjliga inställningar. Genom att jämföra dessa matriser kunde de snabbt mäta hur väl en design stämde överens med den mänskliga banan och använda det värdet för att styra optimeringsprogramvara mot en övergripande bästa lösning.
Bygga och testa utslängningsmekanismen
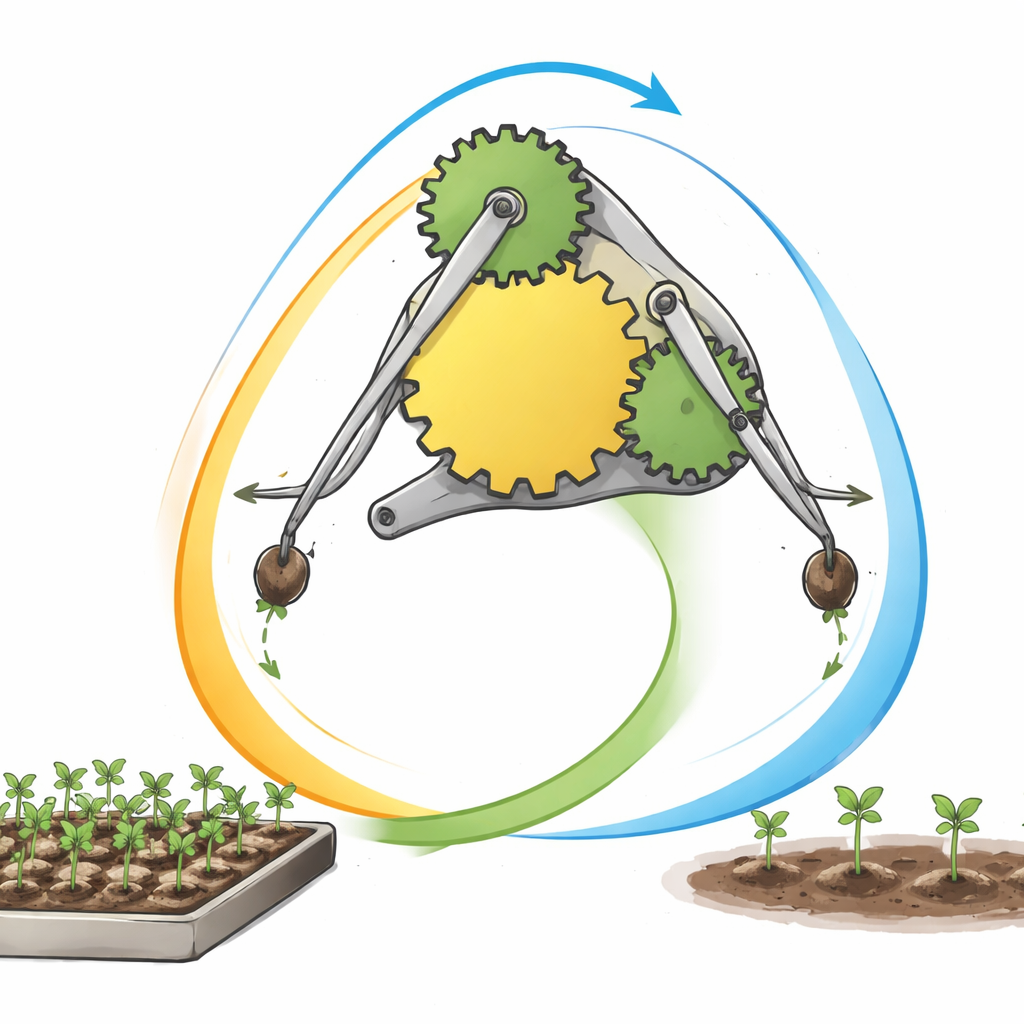
Med de optimerade parametrarna i handen designade forskarna en kompakt mekanism bestående av ett icke-cirkulärt kugghjulspaket och två armpar för att plocka plantor. Den centrala bäraren och den icke-cirkulära solkuggen roterar tillsammans, medan två icke-cirkulära planetkugghjul, vardera fästa vid en plockarm, vrider sig som svar. När bäraren roterar följer varje arm en noggrant formad bana: den rör sig långsamt och nästan rakt vid grepp och utdragning av plantan, svänger sedan plantan till planteringszonen samtidigt som den gradvis tippar den upprätt, och slutligen skjuter den in plantan i en styranordning innan den återvänder för nästa planta. Datorsimuleringar visade att banan och hastigheten i armens spets nära nog matchade målbanan och höll drag- och skjutkrafterna nästan i linje med plantans naturliga tillväxtriktning, vilket minskade böjning och brott.
Från virtuellt modell till verklig rörelse
Teamet byggde sedan en fysisk prototyp med de optimerade kugghjulsprofilerna och armlängderna. De monterade det icke-cirkulära kugghjulssystemet, kammen, huset och armarna på ett testbord och drev mekanismen i arbetshastigheter. Återigen använde de en höghastighetskamera för att spela in den faktiska armrörelsen och jämförde den med den planerade banan. Den verkliga rörelsen överlappade starkt med den ideala banan, vilket bekräftade att den nya designen och spårmatrisoptimeringsmetoden fungerade som avsett. De uppmätta hastigheterna vid plantupptagningen var måttliga, vilket förbättrade noggrannheten och minskade skador, medan skjuthastigheten var högre för att förhindra att plantorna drogs bakåt eller stördes.
Vad detta betyder för risodlare
I praktiska termer visar detta arbete att en maskin kan utformas för att efterlikna den omsorgsfulla, kurviga handrörelsen hos skickliga risplanterare, samtidigt som den arbetar mycket snabbare och mer konsekvent än mänsklig arbetskraft. Genom att kombinera ett icke-cirkulärt kugghjulssystem med en datadriven beskrivning av rörelse skapade författarna en transplanteringsmekanism som kan plocka upp, bära och placera risplantor i krukor effektivt samtidigt som de hålls upprätta och i stort sett oskadade. För bönder kan sådan teknik stödja högre avkastning och mer pålitlig plantering på stora fält, och föra fördelarna med handplantering in i ett fullständigt mekaniserat system.
Citering: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Nyckelord: risplantering, utkastning av plantor, icke-cirkulära kugghjul, spåroptimering, jordbruksmaskiner