Clear Sky Science · pl
Projekt optymalny sterowany macierzą trajektorii mechanizmu miotającego sadzonki ryżu z napędem zębatek nieokrągłych
Dlaczego miotanie maleńkich roślin ma znaczenie
Ręczne sadzenie ryżu jest powolne, ale delikatne dla młodych roślin, co pomaga im szybko się zregenerować i dobrze rosnąć. W miarę powiększania się gospodarstw i wzrostu kosztów pracy inżynierowie poszukują maszyn, które będą sadzić sadzonki ryżu z taką samą troską i precyzją jak wykwalifikowany pracownik. W tym badaniu opisano nowy mechanizm sadzący, który naśladuje ruch ramienia człowieka, wykorzystując sprytny układ zębatek oraz matematyczną „mapę” ruchu do precyzyjnego i delikatnego wyrzucania sadzonek ryżowych z doniczek na pole.
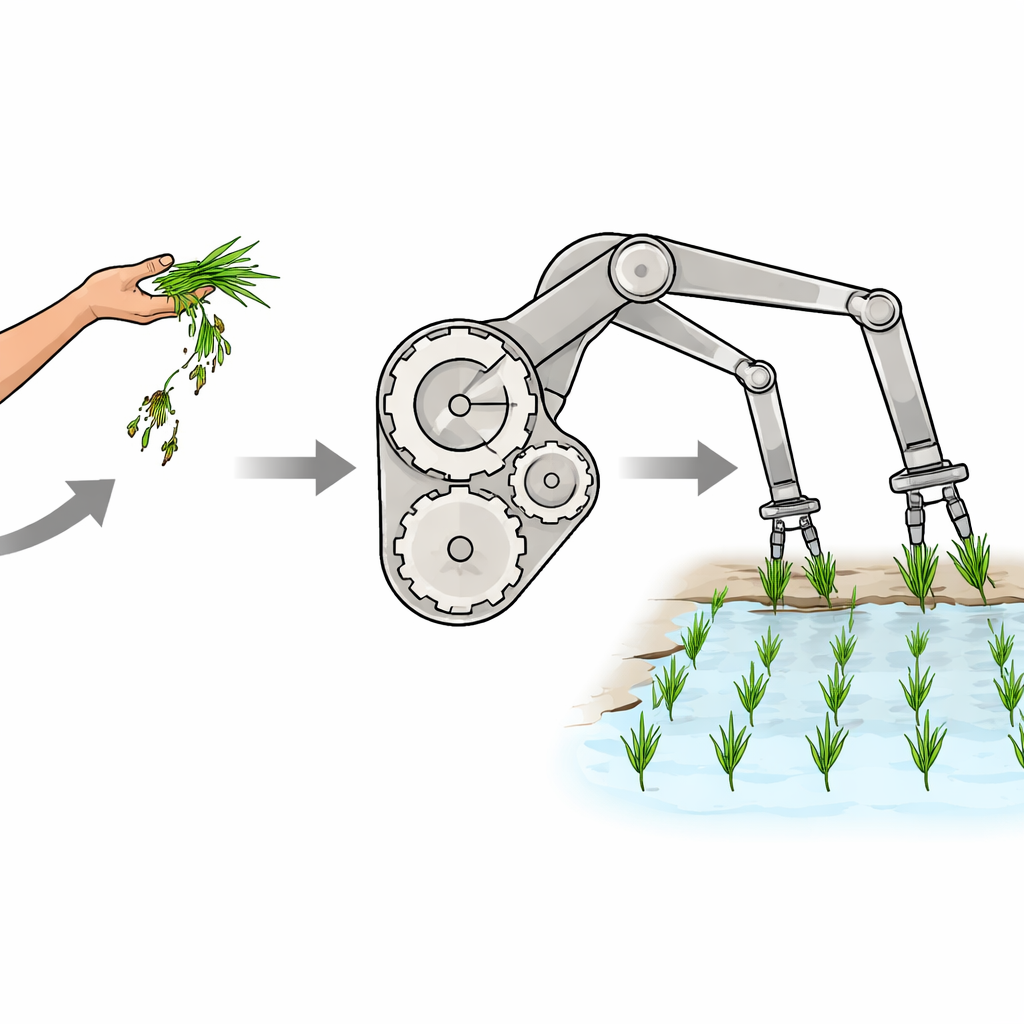
Od dłoni rolnika do ramienia robota
Naukowcy zaczęli od prostego pytania: co dokładnie robi ramię osoby, gdy podnosi i wyrzuca sadzonkę ryżu? Używając kamery szybkiego nagrywania, zarejestrowali ruch ręki i łokcia pracownika z szybkością 300 klatek na sekundę. Podzielili czynność na etapy: chwycenie sadzonki, wyciągnięcie jej z tacek, przeniesienie w odpowiednie miejsce, wypuszczenie tak, by poruszyła się do przodu, a następnie powrót ręki do pozycji wyjściowej. Po odtworzeniu tych ruchów ręka poruszała się po charakterystycznej, pętlowej ścieżce, którą autorzy opisują jako „w kształcie pingwina”, z kątem ręki zmieniającym się tak, by sadzonka pozostawała w większości w pozycji pionowej i by zminimalizować zginanie czy skręcanie.
Przekształcenie naturalnego ruchu w ścieżkę maszyny
Aby odwzorować ten ruch w maszynie, zespół potraktował ramię jako prostą dwuczłonową strukturę obracającą się w barku i łokciu. W terminologii inżynierskiej to dwustawowe, otwarte mechaniczne ogniwo, ale kluczowa idea jest prosta: jeden człon huśta się od tułowia, a drugi od pierwszego, razem odwzorowując podobny typ toru, po którym porusza się dłoń. Problem polegał na tym, że taki system sam z siebie może poruszać się na wiele sposobów, z których większość nie byłaby korzystna dla sadzonek. Autorzy rozwiązali to, stosując napęd z zębatkami nieokrągłymi — zębatkami o nieregularnym obrysie — by kontrolować, jak obracają się stawy, zmuszając koniec ramienia do kreślenia trasy bardzo zbliżonej do tej inspirowanej ruchem człowieka.
Pozwolenie danym kierować projektem
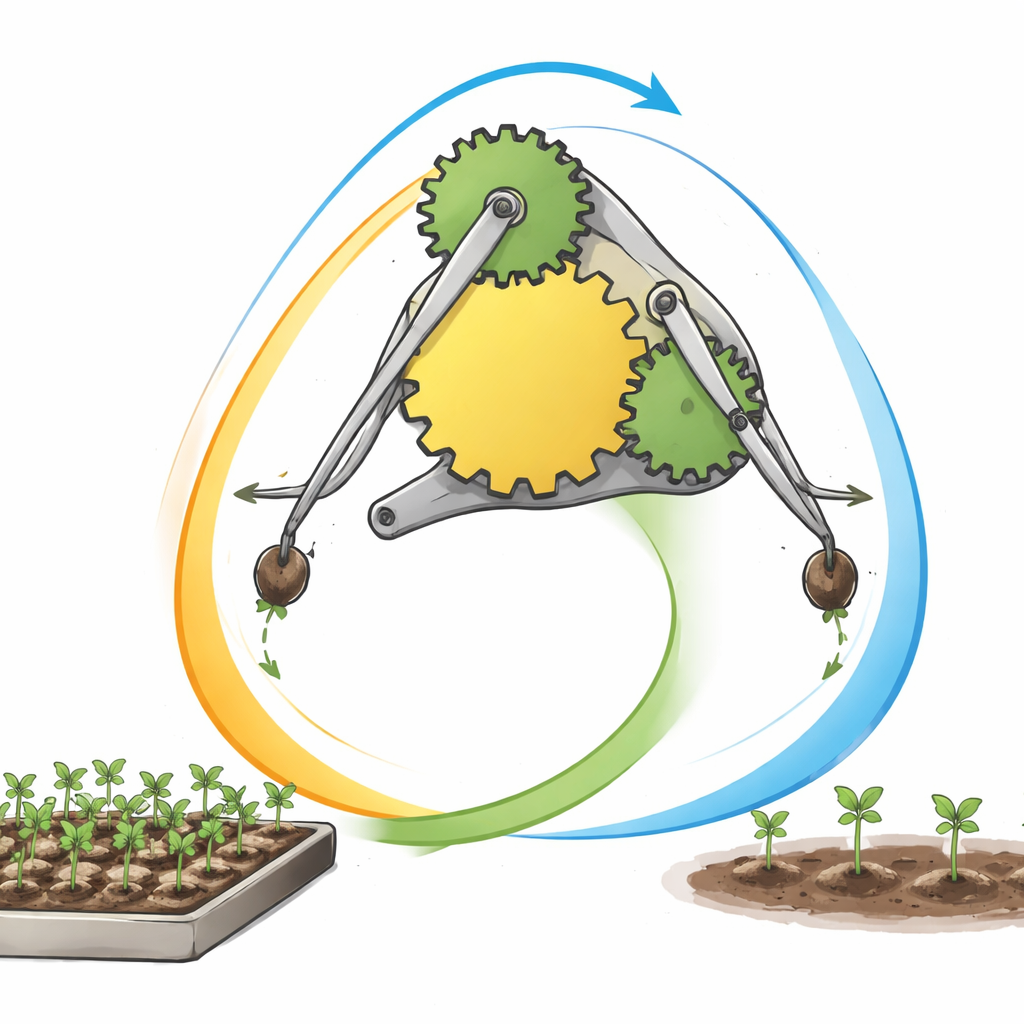
Projekt takiego mechanizmu to nie tylko szkicowanie krzywych na oko. Istnieje dziesiątki parametrów projektowych, w tym kształt zębatek, sposób ich montażu i długości ramion. Czynniki te oddziałują na siebie w złożony sposób. Aby sobie z tym poradzić, autorzy stworzyli nowy sposób opisu ruchu jako „macierz trajektorii”. Najpierw wzięli idealną ścieżkę dłoni i zunifikowali ją — usuwając wpływy skali, położenia i rotacji — a następnie nałożyli na nią siatkę. Komórki siatki zawierające ścieżkę zostały oznaczone, zamieniając ruch w wzór zer i jedynek. To samo zrobiono dla wielu kandydackich ścieżek maszyny w całym zakresie możliwych ustawień. Porównując te macierze, szybko mierzyli, jak dobrze dany projekt pasuje do ścieżki podobnej do ludzkiej, i używali tego wyniku do ukierunkowania oprogramowania optymalizacyjnego w stronę najlepszego rozwiązania.
Budowa i testowanie mechanizmu miotającego
Po ustaleniu zoptymalizowanych parametrów badacze zaprojektowali kompaktowy mechanizm składający się z zestawu zębatek nieokrągłych i dwóch ramion chwytających sadzonki. Nośnik centralny i zębatka słoneczna o nieregularnym kształcie obracają się razem, podczas gdy dwie nieokrągłe zębatki planetarne, każda przymocowana do ramienia chwytającego, obracają się w odpowiedzi. W miarę obracania nośnika każde ramię podąża starannie ukształtowaną ścieżką: porusza się powoli i niemal prosto podczas chwytania i wyciągania sadzonki, następnie huśta ją do strefy sadzenia, stopniowo ustawiając pionowo, a w końcu pcha ją do urządzenia prowadzącego, po czym wraca po kolejną sadzonkę. Symulacje komputerowe wykazały, że tor ruchu i prędkość końcówki ramienia ściśle odpowiadały docelowej trajektorii i utrzymywały siły ciągnięcia i pchania niemal zgodne z naturalnym kierunkiem wzrostu sadzonki, zmniejszając zginanie i łamanie.
Z modelu wirtualnego do ruchu w rzeczywistości
Zespół następnie zbudował fizyczny prototyp, wykorzystując zoptymalizowane profile zębatek i wymiary ramion. Zmontowali napęd z zębatkami nieokrągłymi, krzywkę, obudowę i ramiona na stanowisku testowym i uruchomili mechanizm przy prędkościach roboczych. Ponownie używając kamery szybkiego nagrywania, zarejestrowali rzeczywisty ruch ramienia i porównali go z zaplanowaną ścieżką. Ruch rzeczywisty silnie pokrywał się z idealną trajektorią, potwierdzając, że nowy projekt i metoda optymalizacji za pomocą macierzy trajektorii działają zgodnie z założeniami. Mierzone prędkości podczas podnoszenia sadzonki były umiarkowane, co pomagało w precyzji i zmniejszało uszkodzenia, podczas gdy ruch pchający był szybszy, co zapobiegało cofnięciu lub zaburzeniu sadzonek.
Co to oznacza dla rolników ryżu
W praktyce praca ta pokazuje, że można zaprojektować maszynę naśladującą ostrożny, zakrzywiony ruch dłoni wprawnych sadzaczy ryżu, działającą znacznie szybciej i bardziej konsekwentnie niż sama praca ludzka. Poprzez połączenie układu zębatek nieokrągłych z opisem ruchu opartym na danych, autorzy stworzyli mechanizm przesadzający, który może efektywnie podnosić, przenosić i umieszczać sadzonki ryżowe z doniczek, utrzymując je w pozycji pionowej i w dużej mierze nienaruszone. Dla rolników taka technologia może wspierać wyższe plony i bardziej niezawodne sadzenie na dużych polach, przenosząc zalety ręcznego wysadzania do w pełni zmechanizowanego systemu.
Cytowanie: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Słowa kluczowe: wysadzanie ryżu, miotanie sadzonek, zębatki nieokrągłe, optymalizacja trajektorii, maszyny rolnicze