Clear Sky Science · he
עיצוב אופטימלי מונחה מטריצת מסלולים למנגנון ההשלכה של שתילי אורז באמצעות רכבת גלגלי שיניים בלתי-עגולים
למה השלכת שתילים קטנים חשובה
שתילת אורז ביד איטית, אך עדינה כלפי השתילים הצעירים ועוזרת להם להתאושש במהירות ולגדול היטב. כשהחוות מתרחבות ועלויות העבודה עולות, מהנדסים מחפשים מכונות שיכלו לשתול שתילי אורז באותו האופן המסור והמדויק של עובד מיומן. מחקר זה מציג מנגנון שתילה חדש המדמה את תנועת הזרוע האנושית תוך שימוש במערכת גלגלי שיניים חכמה ו"מפת דרכים" מתמטית של תנועה על מנת להשליך את שתילי האורז בצורה מדויקת ועדינה לשדה.
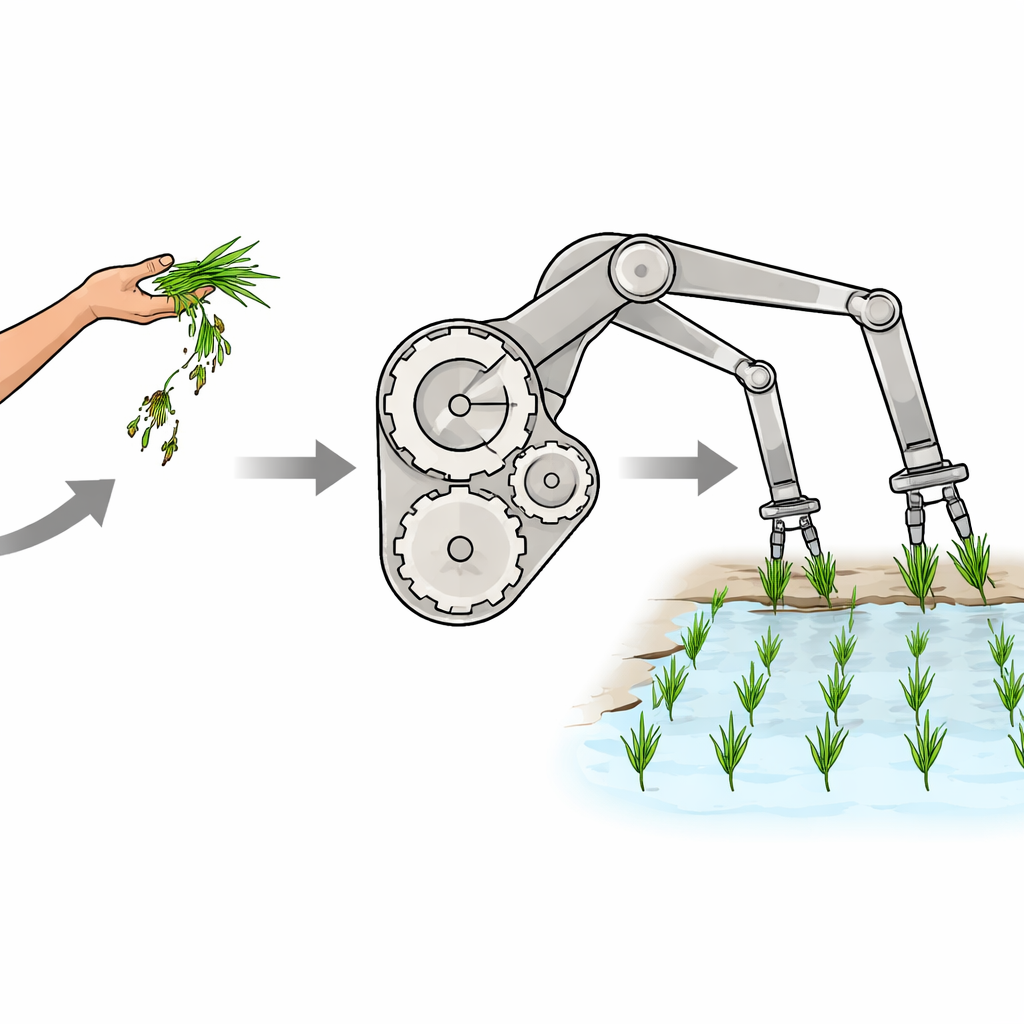
מהיד של החקלאי לזרוע של הרובוט
החוקרים התחילו בשאלה פשוטה: מה בעצם עושה זרוע האדם כשאדם לוקח ומושך ומניח שתיל אורז? הם צילמו את היד והמרפק של העובד במצלמה מהירה בהקלטה של 300 פריימים לשניה. הם חלקו את הפעולה לשלבים: אחיזה של השתיל, משיכתו מהמגש, הובלתו למקום המדויק, שחרורו כך שיתקדם קדימה, והחזרת היד להתחלה. כאשר עקבו אחרי התנועות הללו, היד עקבה מסלול מובהק בצורת לולאה שתואר על ידי המחברים כ"בצורת פינגווין", כאשר זווית היד משתנה כדי לשמור על השתיל כמעט זקוף ולהפחית כיפוף או סיבוב.
הפיכת התנועה הטבעית למסלול מכני
כדי ללכוד תנועה זו במכונה, הצוות התייחס לזרוע כמבנה פשוט בן שתי קורות המסתובבות בכתף ובמרפק. במונחים הנדסיים מדובר במנגנון שפך פתוח דו-מפרקי, אך הרעיון המרכזי פשוט: קטע אחד מתנודד מהגוף וקטע שני מתנודד מהראשון, וכך יחדיו מציירים מסלול דומה לזה שהיד האנושית עוקבת אחריו. האתגר הוא שבמצב חופשי למערכת כזו יש דרכי תנועה רבות, שרובן אינן מתאימות לשתילים. המחברים פתרו זאת באמצעות רכבת גלגלי שיניים בלתי-עגולים — גלגלים שקווי המתאר שלהם אינם עגולים — שמבקרים את סיבובי המפרקים, וכופים על קצה הזרוע לעקוב אחרי מסלול הקרוב מאוד למסלול המעורר מהאדם.
לאפשר לנתונים להנחות את העיצוב
עיצוב מנגנון כזה איננו רק שרטוט עקומות בעין. יש לעשרות פרמטרים של עיצוב, כולל צורות הגלגלים, אופן ההרכבה ואורכי הזרועות. גורמים אלה מתקשרים זה בזה בדרכים מורכבות. כדי להתמודד עם זה יצרו המחברים דרך חדשה לתאר תנועה כ"מטריצת מסלול". ראשית לקחו את מסלול היד האידיאלי ותקננו אותו — הסרת השפעות של גודל, מיקום וסיבוב — ולאחר מכן הציבו אותו על רשת. תאי הרשת שהכילו את המסלול סומנו, והמרה את התנועה לתבנית של אפסים ואחדים. הם עשו זאת גם עבור מסלולי מכונה מועמדים רבים על פני טווח ההגדרות האפשרי. באמצעות השוואת מטריצות אלו יכלו למדוד במהירות עד כמה כל עיצוב תאם את המסלול הדמוי-אנושי, ולהשתמש בציון הזה כדי להנחות תוכנת אופטימיזציה לעבר פתרון כולל מיטבי.
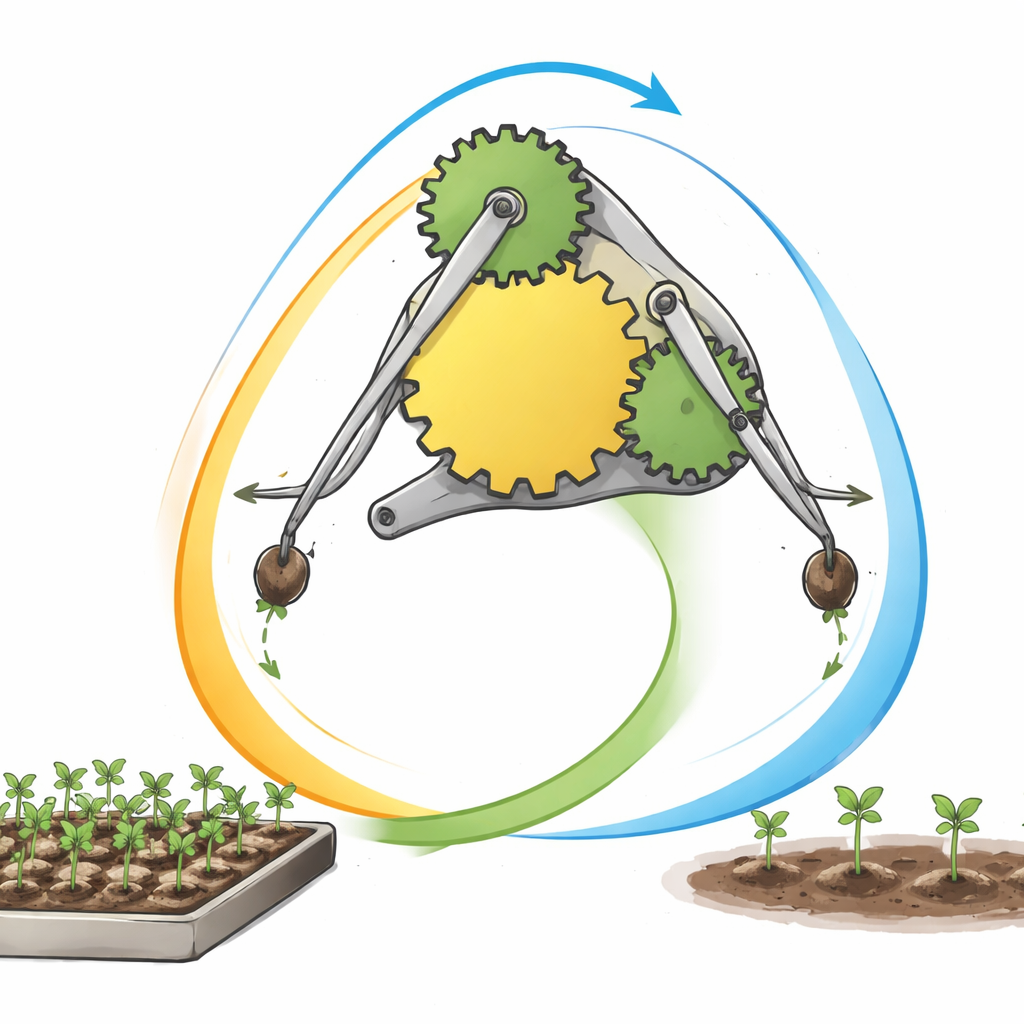
בניית ובדיקת מנגנון ההשלכה
עם הפרמטרים הממוטבים ביד, החוקרים תכננו מנגנון קומפקטי המורכב מערכת גלגלי שיניים בלתי-עגולים ושתי זרועות לקטיפת שתילים. הנשא המרכזי וגלגל השמש הבלתי-עגול מסתובבים יחד, בעוד שני גלגלי כוכב בלתי-עגולים, כל אחד קבוע לזרוע קטיפה, מסתובבים בתגובה. כשהנשא מסתובב, כל זרוע עוקבת אחר מסלול מעוצב בקפידה: היא זזה באיטיות וכמעט בקו ישר בעת האחיזה ומשיכת השתיל, ואז מתנודדת לאזור השתילה תוך הטיה הדרגתית של השתיל למצב זקוף, ולבסוף דוחפת אותו לתוך מתקן מווי לפני שהיא חוזרת לשתיל הבא. סימולציות ממוחשבות הראו כי המסלול והמהירות בקצה הזרוע תואמים באופן הדוק את המסלול היעד ושומרים על כוחות המשיכה והדחיפה מיושרים בקרבת כיוון הגדילה הטבעי של השתיל, מה שמפחית כיפוף ושבירה.
ממדגם וירטואלי לתנועה במציאות
הצוות אחר כך בנה אב-טיפוס פיזי באמצעות פרופילי הגלגלים והמידות הממוטבות של הזרועות. הם הרכיבו את רכבת הגלגלים הבלתי-עגולים, הקמיה, המארז והזרועות על משטח מבחן והניעו את המנגנון במהירויות עבודה. שוב בצילום במהירות גבוהה הקליטו את תנועת הזרוע בפועל והשוו אותה למסלול המתוכנן. התנועה הממשית חפפה במידה רבה עם המסלול האידיאלי, מה שאישר כי העיצוב החדש ושיטת האופטימיזציה המבוססת על מטריצת המסלול עבדו כמתוכנן. המהירויות הנמדדות במהלך אחיזת השתיל היו מתונות, מה שסייע לדיוק ולהפחתת נזק, בעוד תנועת הדחיפה הייתה מהירה יותר, מה שעוזר למנוע משיכת השתיל לאחור או הפרעה לו.
מה זה אומר לחקלאי האורז
ברמה מעשית, עבודה זו מראה שניתן לתכנן מכונה המדמה את תנועת היד המעוגלת והזהירה של זורעי האורז המיומנים, תוך פעולה מהירה ועקבית הרבה יותר מהעבודה האנושית לבדה. באמצעות שילוב מערכת גלגלי שיניים בלתי-עגולים ותיאור נתוני-מוגדר של תנועה, יצרו המחברים מנגנון שתילה שיכול לבחור, לשאת ולממקם שתילי אורז במגש ביעילות תוך שמירה עליהם זקופים וללא נזק רב. לחקלאים, טכנולוגיה כזו עשויה לתמוך בתפוקות גבוהות יותר ובשתילה מהימנה יותר בשדות רחבים, ולהביא את יתרונות השתילה ביד למערכת ממוכנת לחלוטין.
ציטוט: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
מילות מפתח: שתילת אורז, השלכת שתילים, גלגלי שיניים בלתי-עגולים, אופטימיזציית מסלול, מיכון חקלאי