Clear Sky Science · ru
Оптимальное проектирование механизма бросания рассады риса с использованием некруговой передачи, направляемое матрицей траекторий
Почему важно аккуратно бросать маленькие растения
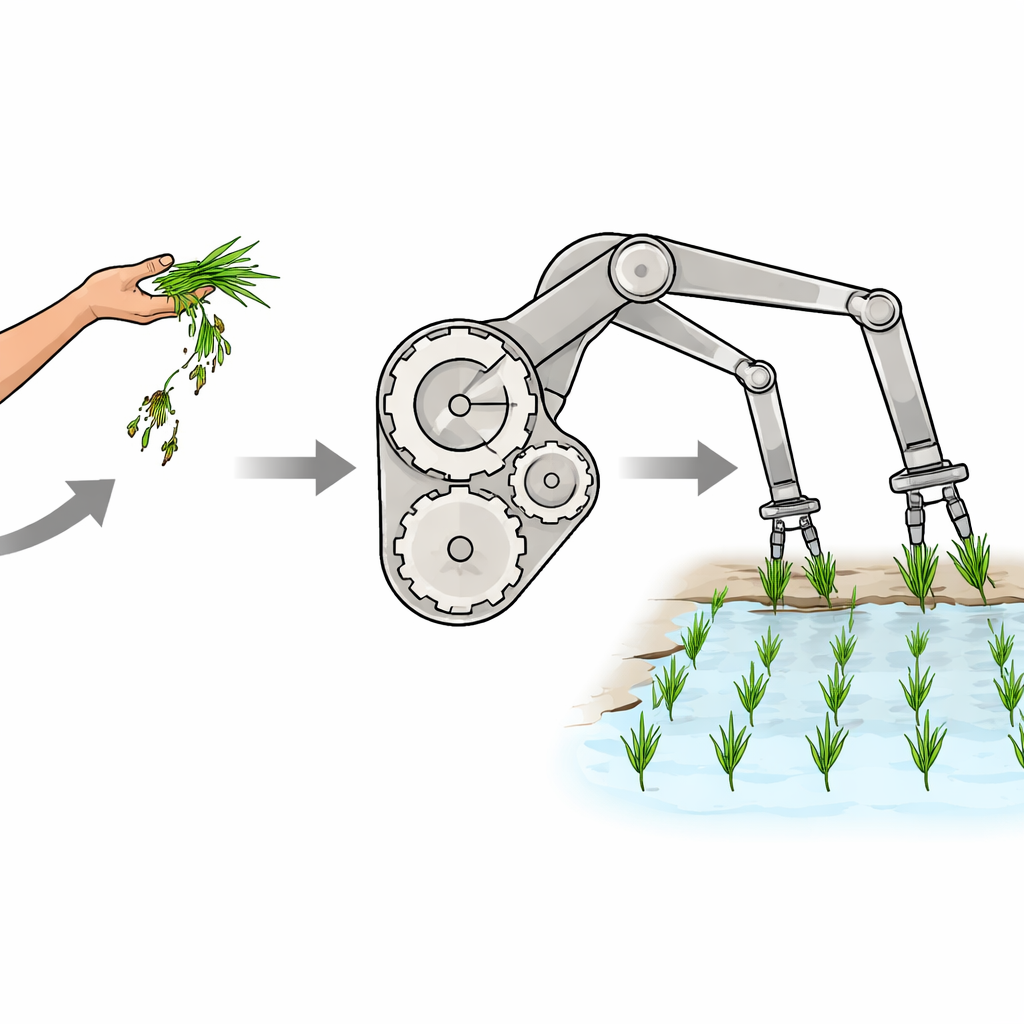
Посадка риса вручную медленна, но щадящая для молодых растений, что помогает им быстро восстановиться и хорошо расти. По мере увеличения масштабов ферм и роста затрат на рабочую силу инженеры ищут машины, способные с той же заботой и точностью, что и опытный работник, сажать рассаду. В этом исследовании описан новый механизм посадки, который имитирует движение человеческой руки, используя хитроумную зубчатую передачу и математическую «дорожную карту» движения, чтобы точно и бережно бросать рассаду из горшочков в поле.
От руки фермера к роботизированной руке
Исследователи начали с простого вопроса: что именно делает рука человека, когда он поднимает и бросает рассаду риса? С помощью высокоскоростной камеры они записали движения кисти и локтя работника со скоростью 300 кадров в секунду. Действие разбили на этапы: захват рассады, вытаскивание её из лотка, перемещение в нужную точку, отпускание так, чтобы рассадa двигалась вперёд, и возврат руки в исходное положение. При отслеживании этих движений кисть описывала характерный петлеобразный путь, который авторы называют «в форме пингвина», при этом угол кисти менялся так, чтобы держать рассаду преимущественно вертикально и минимизировать изгиб или перекручивание.
Преобразование естественного движения в машинную траекторию
Чтобы воспроизвести это движение в машине, команда рассмотрела руку как простую структуру из двух звеньев, вращающуюся в плечевом и локтевом суставах. В инженерных терминах это двухсуставной открытый механизм, но основная идея проста: одно звено раскачивается от корпуса, второе — от первого, и вместе они воспроизводят путь, аналогичный движению руки человека. Проблема в том, что сам по себе такой механизм может двигаться множеством способов, большинство из которых было бы нежелательно для рассады. Авторы решили эту задачу, применив некруговую зубчатую передачу — колёса с неокруглым профилем — чтобы управлять взаимным поворотом суставов, заставляя конец «руки» описывать траекторию, очень близкую к человеческой.
Когда данные задают направление проектирования
Проектирование такого механизма — это не просто рисование кривых на глаз. Существует десятки параметров: форма зубчатых колёс, способ их крепления, длины рычагов и т. д. Эти факторы взаимно влияют друг на друга сложным образом. Чтобы справиться с этим, авторы разработали новый способ описания движения в виде «матрицы траектории». Сначала они взяли идеальную траекторию руки и стандартизовали её — устранили влияние масштаба, положения и поворота — а затем наложили на сетку. Ячейки сетки, через которые проходила траектория, помечались, превращая движение в шаблон из нулей и единиц. То же самое проделали для множества кандидатных траекторий механизма в полном диапазоне возможных настроек. Сравнивая эти матрицы, они быстро оценивали, насколько каждая конструкция соответствовала человеческой траектории, и использовали этот показатель для управления оптимизационным программным обеспечением в поиске наилучшего решения в целом.
Создание и испытание механизма бросания
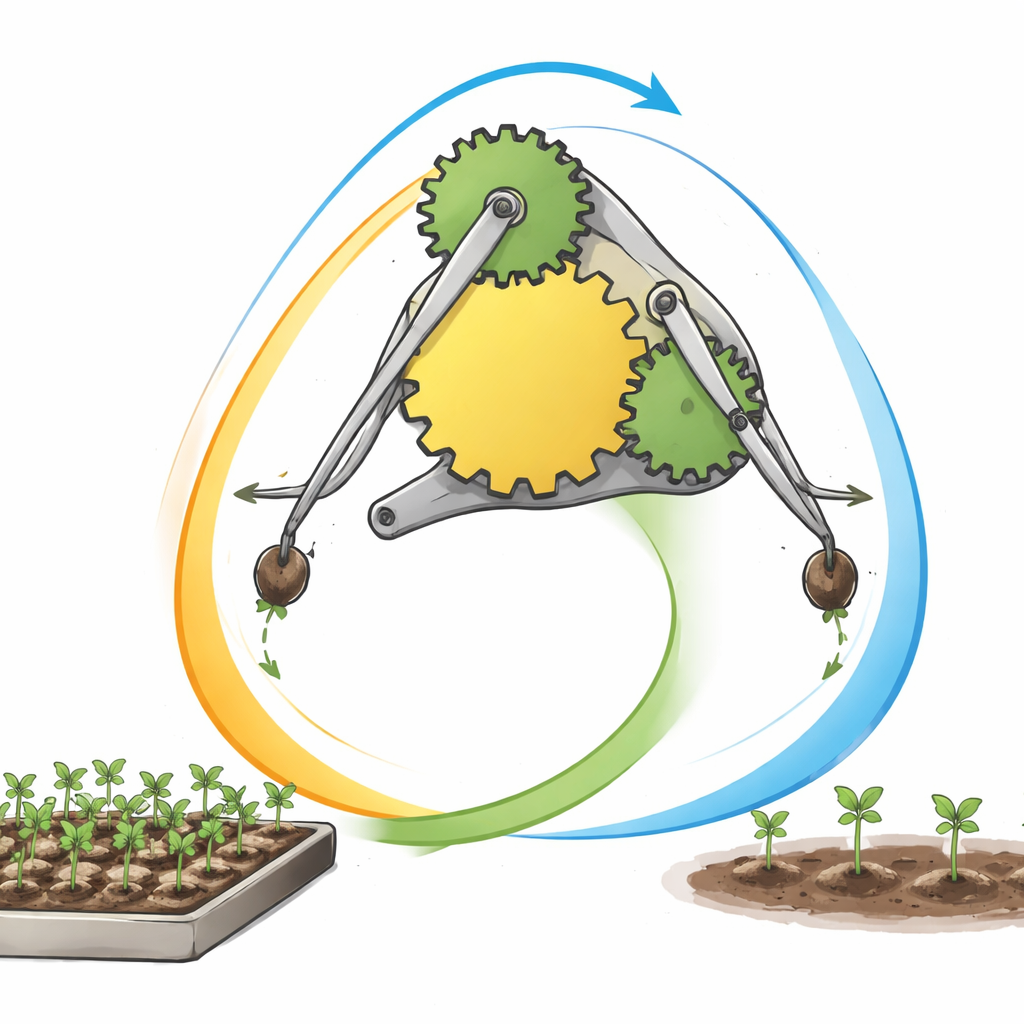
Имея оптимальные параметры, исследователи спроектировали компактный механизм, состоящий из набора некруговых зубчатых колёс и двух захватывающих рычагов для рассады. Центральный несущий элемент и некруговая солнечная шестерня вращаются совместно, тогда как две некруговые планетарные шестерни, каждая закреплённая на захватывающем рычаге, поворачиваются в ответ. По мере вращения несущего элемента каждый рычаг следует тщательно сформированной траектории: он медленно и практически прямо движется при захвате и вытягивании рассады, затем перемещает её в зону посадки, постепенно выправляя вертикальное положение, и, наконец, проталкивает её в направляющее устройство перед возвращением за следующей растением. Компьютерные симуляции показали, что путь и скорость кончика рычага тесно соответствуют целевой траектории и что силы тяги и толчка остаются почти выровненными с естественным направлением роста рассады, уменьшая изгиб и поломку.
От виртуальной модели к реальному движению
Команда затем собрала физический прототип с оптимальными профилями зубчатых колёс и размерами рычагов. Они смонтировали некруговую передачу, кулачок, корпус и рычаги на испытательном стенде и приводили механизм в движение на рабочих скоростях. Снова используя высокоскоростную камеру, они записали реальное движение рычага и сравнили его с запланированной траекторией. Фактическое движение сильно совпало с идеальной траекторией, подтвердив, что новая конструкция и метод оптимизации на основе матрицы траекторий работают как задумано. Измеренные скорости при подъёме рассады были умеренными, что помогало точности и снижало повреждения, а толкающее движение было быстрее, что предотвращало срывы или смещение рассады назад.
Что это значит для рисоводов
Практически это исследование показывает, что машину можно спроектировать так, чтобы она имитировала аккуратное, изогнутое движение руки опытных пересадчиков риса, при этом работая гораздо быстрее и стабильнее, чем человеческий труд. Сочетая некруговую зубчатую передачу с описанием движения на основе данных, авторы создали механизм пересадки, который может эффективно захватывать, переносить и размещать рассаду в горшочках, удерживая её в вертикальном положении и в основном не повреждая. Для фермеров такая технология может обеспечить более высокие и стабильные урожаи на больших полях, перенёсши преимущества ручной пересадки в полностью механизированную систему.
Цитирование: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Ключевые слова: пересадка риса, бросание рассады, некруговые зубчатые колёса, оптимизация траектории, сельскохозяйственная техника