Clear Sky Science · it
Progettazione ottimale guidata da matrice di traiettoria del meccanismo di lancio di piantine per trapianto a ingranaggi non circolari
Perché il lancio delle piantine è importante
Piantare il riso a mano è lento, ma è delicato per le piantine e le aiuta a riprendersi rapidamente e a crescere bene. Con l’aumentare delle dimensioni delle aziende agricole e dei costi del lavoro, gli ingegneri cercano macchine in grado di mettere a dimora le piantine con la stessa cura e precisione di un operatore esperto. Questo studio descrive un nuovo meccanismo di impianto che imita il movimento del braccio umano utilizzando un ingegnoso sistema di ingranaggi e una “mappa” matematica del movimento per lanciare le piantine in zolla con accuratezza e delicatezza.
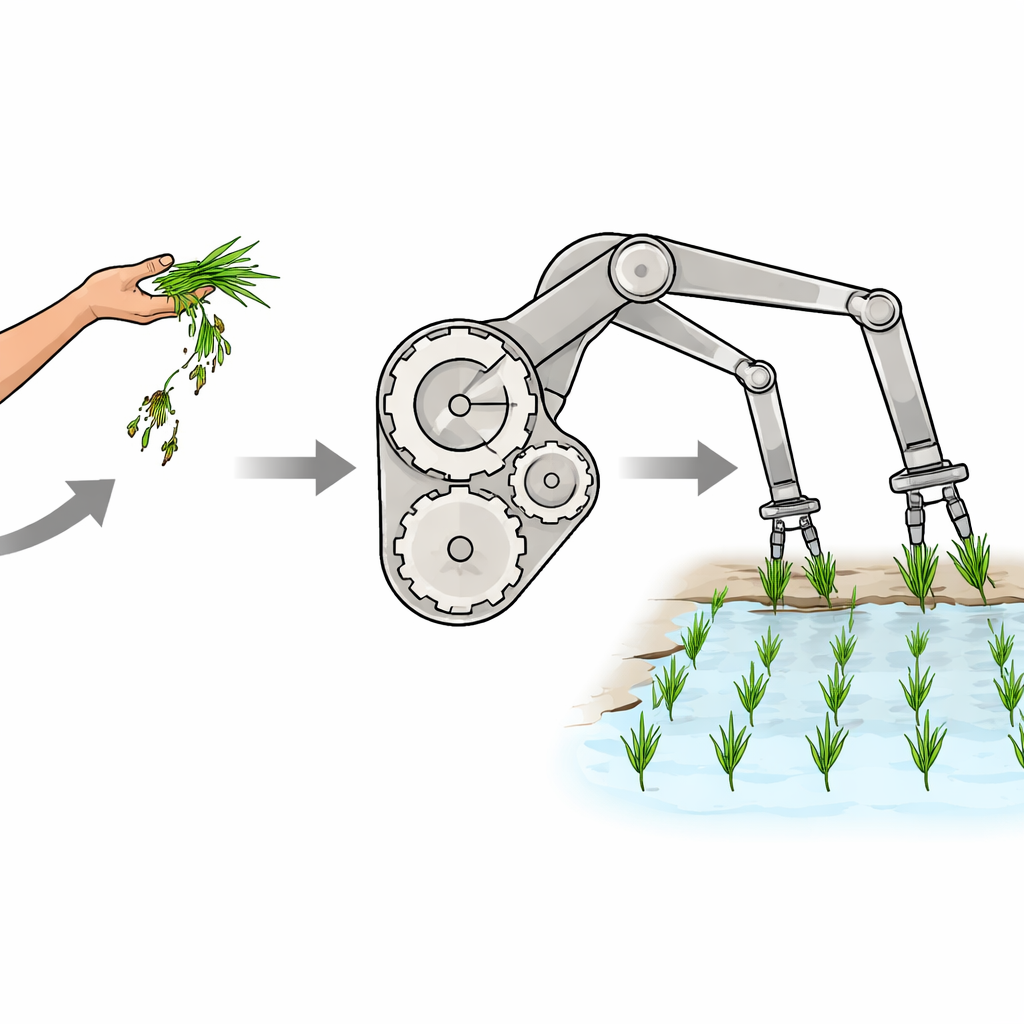
Dalla mano del contadino al braccio robotico
I ricercatori hanno iniziato ponendosi una domanda semplice: cosa fa esattamente il braccio di una persona quando prende e lancia una piantina di riso? Con una videocamera ad alta velocità hanno registrato mano e gomito di un operatore a 300 fotogrammi al secondo. Hanno suddiviso l’azione in fasi: afferrare la piantina, estrarla dalla vaschetta, trasportarla nella posizione corretta, lasciarla andare in modo che si muova in avanti e poi riportare la mano alla posizione di partenza. Tracciando questi movimenti, la mano ha seguito un percorso distintivo, ad anello, descritto dagli autori come ‘‘a forma di pinguino’’, con l’angolo della mano che varia per mantenere la piantina sostanzialmente eretta e minimizzare piegamenti o torsioni.
Trasformare il movimento naturale in una traiettoria macchina
Per riprodurre questo movimento in una macchina, il team ha modellato il braccio come una struttura semplice a due elementi che ruotano sulla spalla e sul gomito. In termini ingegneristici si tratta di un meccanismo a catena aperta con due giunti, ma l’idea chiave è diretta: un segmento oscilla dal corpo e un secondo segmento oscilla dal primo, tracciando insieme lo stesso tipo di percorso della mano. La difficoltà è che, lasciato libero, un tale sistema ha molti modi di muoversi, la maggior parte dei quali non sarebbe adatta alle piantine. Gli autori hanno risolto il problema impiegando un treno di ingranaggi non circolari — ingranaggi dai profili non rotondi — per controllare come ruotano i giunti, costringendo l’estremità del braccio a seguire una traiettoria molto vicina a quella ispirata al movimento umano.
Lascare che i dati guidino il progetto
Progettare un tale meccanismo non significa semplicemente disegnare curve a occhio. Ci sono decine di parametri di progetto, inclusi la forma degli ingranaggi, il loro montaggio e la lunghezza delle braccia. Questi fattori interagiscono in modi complessi. Per gestirli, gli autori hanno creato un nuovo modo di descrivere il movimento come una “matrice di traiettoria”. Prima hanno preso il percorso ideale della mano e lo hanno standardizzato — rimuovendo effetti di scala, posizione e rotazione — e poi lo hanno sovrapposto a una griglia. Le celle della griglia che contenevano il percorso sono state segnate, trasformando il movimento in un motivo di zeri e uni. Hanno fatto lo stesso per molte traiettorie candidate della macchina attraverso l’intero intervallo di impostazioni possibili. Confrontando queste matrici, hanno potuto misurare rapidamente quanto ogni progetto corrispondesse al percorso umano e usare quel punteggio per guidare il software di ottimizzazione verso la soluzione complessiva migliore.
Costruzione e prova del meccanismo di lancio
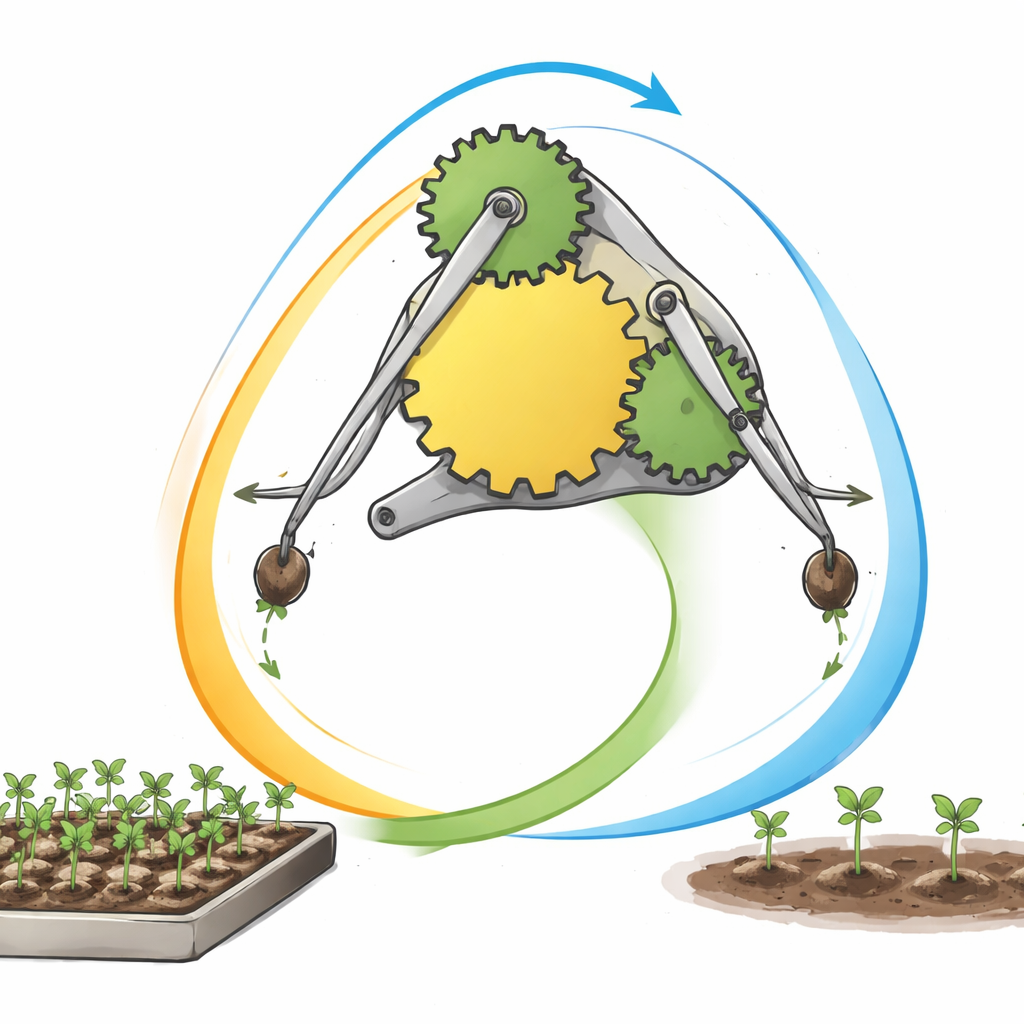
Con i parametri ottimizzati in mano, i ricercatori hanno progettato un meccanismo compatto costituito da un set di ingranaggi non circolari e due bracci raccoglitori di piantine. Il portatore centrale e l’ingranaggio solare non circolare ruotano insieme, mentre due ingranaggi planetari non circolari, ciascuno fissato a un braccio raccoglitore, girano in risposta. Quando il portatore si muove, ogni braccio segue un percorso attentamente sagomato: si muove lentamente e quasi rettilineo mentre afferra e tira fuori la piantina, poi la oscilla verso la zona di impianto inclinando gradualmente la piantina in posizione verticale e infine la spinge in un dispositivo guida prima di tornare per la piantina successiva. Le simulazioni al computer hanno mostrato che il percorso e la velocità alla punta del braccio corrispondevano strettamente alla traiettoria target e mantenevano le forze di trazione e spinta quasi allineate con la direzione naturale di crescita della piantina, riducendo piegature e rotture.
Dal modello virtuale al movimento reale
Il team ha quindi costruito un prototipo fisico utilizzando i profili degli ingranaggi ottimizzati e le dimensioni dei bracci. Hanno assemblato il treno di ingranaggi non circolari, la camma, l’involucro e i bracci su una panca di prova e hanno azionato il meccanismo a velocità operative. Ancora una volta, con una videocamera ad alta velocità hanno registrato il movimento reale del braccio e lo hanno confrontato con il percorso pianificato. Il movimento reale si è sovrapposto in modo marcato alla traiettoria ideale, confermando che il nuovo progetto e il metodo di ottimizzazione basato sulla matrice di traiettoria funzionavano come previsto. Le velocità misurate durante la presa della piantina sono risultate modeste, favorendo la precisione e riducendo i danni, mentre il movimento di spinta è stato più rapido, aiutando a evitare che le piantine venissero trascinate all’indietro o disturbate.
Cosa significa per i coltivatori di riso
In termini pratici, questo lavoro dimostra che una macchina può essere progettata per imitare il movimento curvo e accurato della mano dei piantatori esperti, operando molto più velocemente e in modo più coerente rispetto al solo lavoro umano. Combinando un sistema di ingranaggi non circolari con una descrizione del movimento guidata dai dati, gli autori hanno creato un meccanismo di trapianto in grado di raccogliere, trasportare e posizionare efficientemente le piantine in zolla mantenendole erette e in gran parte indenni. Per gli agricoltori, tecnologie di questo tipo potrebbero sostenere rese più elevate e impianti più affidabili su grandi superfici, portando i benefici del trapianto a mano in un sistema completamente meccanizzato.
Citazione: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Parole chiave: trapianto di riso, lancio di piantine, ingranaggi non circolari, ottimizzazione della traiettoria, macchine agricole