Clear Sky Science · fr
Conception optimale guidée par une matrice de trajectoire d’un mécanisme de lancement de plants à entraînement par train d’engrenages non circulaires pour plants en pot de riz
Pourquoi le lancer des jeunes plants a de l’importance
Planter le riz à la main est lent, mais c’est doux pour les jeunes plants et cela favorise une reprise rapide et une bonne croissance. À mesure que les exploitations s’agrandissent et que le coût de la main-d’œuvre augmente, les ingénieurs recherchent des machines capables de repiquer les plants de riz avec le même soin et la même précision qu’un ouvrier expérimenté. Cette étude décrit un nouveau mécanisme de plantation qui imite le mouvement du bras humain tout en utilisant un système d’engrenages ingénieux et une « feuille de route » mathématique du mouvement pour lancer les plants en pot de riz avec précision et délicatesse.
De la main du paysan au bras robotisé
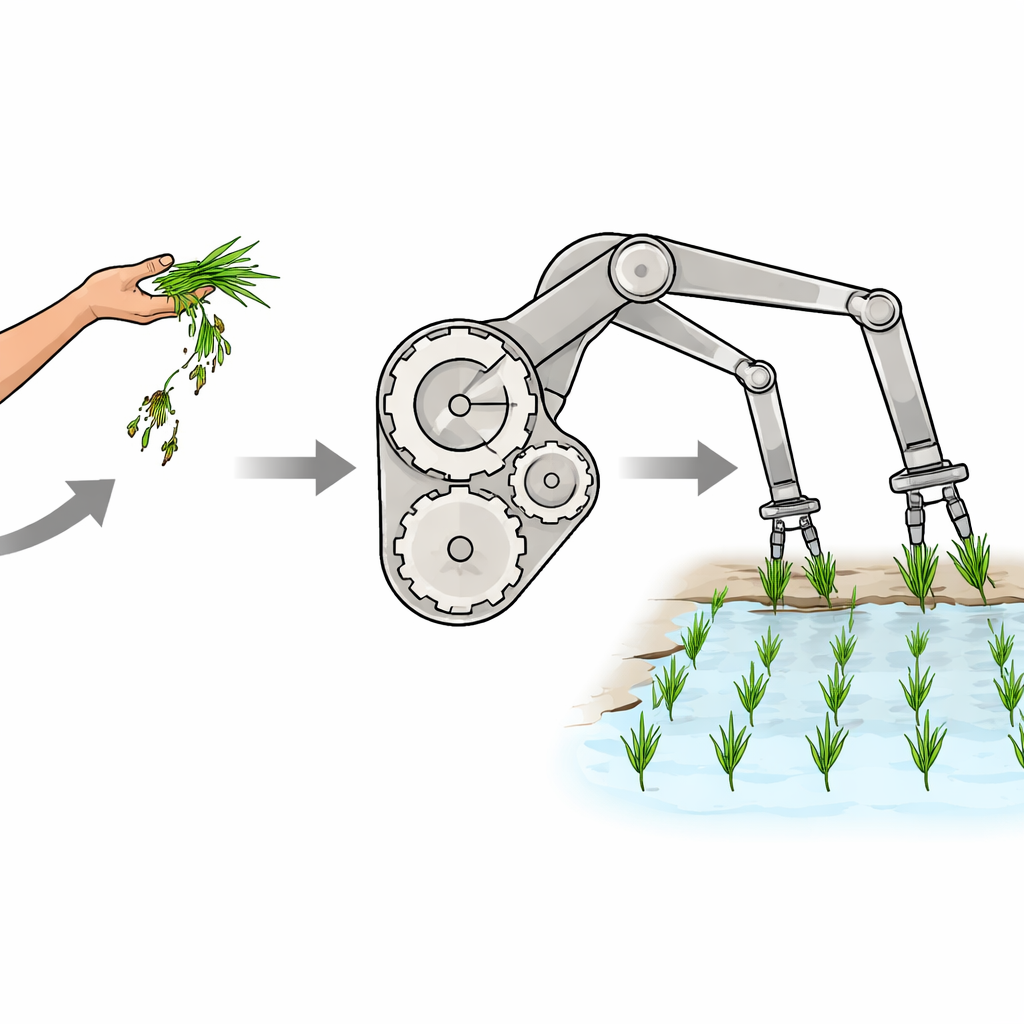
Les chercheurs ont commencé par poser une question simple : que fait exactement le bras d’une personne lorsqu’elle saisit et lance un plant de riz ? À l’aide d’une caméra à haute vitesse, ils ont filmé la main et le coude d’un opérateur à 300 images par seconde. Ils ont décomposé l’action en étapes : saisir le plant, l’extraire de sa caissette, le transporter jusqu’au bon emplacement, le lâcher pour qu’il avance, puis ramener la main à la position de départ. Lorsque ces mouvements ont été tracés, la main a suivi une trajectoire caractéristique, en boucle, que les auteurs décrivent comme « en forme de pingouin », l’angle de la main changeant pour maintenir le plant principalement vertical et pour minimiser les flexions ou les torsions.
Transformer le mouvement naturel en trajectoire mécanique
Pour reproduire ce mouvement dans une machine, l’équipe a modélisé le bras comme une structure simple à deux éléments articulés au niveau de l’épaule et du coude. En termes d’ingénierie, il s’agit d’un mécanisme en chaîne ouverte à deux articulations, mais l’idée principale est simple : un segment oscille depuis le corps, et le deuxième segment oscille depuis le premier, traçant ensemble le même type de trajectoire que la main humaine. Le problème est que, laissé à lui-même, un tel système a de nombreuses manières de bouger, dont la plupart seraient préjudiciables aux plants. Les auteurs ont résolu cela en utilisant un train d’engrenages non circulaires — des pignons dont le profil n’est pas rond — pour contrôler la rotation des articulations, contraignant l’extrémité du bras à suiv re une trajectoire très proche de celle inspirée par l’humain.
Laisser les données guider la conception
Concevoir un tel mécanisme ne se résume pas à dessiner des courbes au jugé. Il y a des dizaines de paramètres de conception, notamment la forme des engrenages, leur montage et la longueur des bras. Ces facteurs interagissent de façon complexe. Pour gérer cela, les auteurs ont créé une nouvelle manière de décrire le mouvement sous la forme d’une « matrice de trajectoire ». Ils ont d’abord pris la trajectoire idéale de la main et l’ont standardisée — en éliminant les effets de taille, de position et de rotation — puis l’ont superposée sur une grille. Les cellules de la grille contenant la trajectoire ont été marquées, transformant le mouvement en un motif de zéros et de uns. Ils ont fait de même pour de nombreuses trajectoires candidates de la machine à travers l’ensemble des réglages possibles. En comparant ces matrices, ils ont pu mesurer rapidement dans quelle mesure chaque conception correspondait à la trajectoire humaine, et utiliser ce score pour orienter un logiciel d’optimisation vers la meilleure solution globale.
Construction et essais du mécanisme de lancement
Avec les paramètres optimisés en main, les chercheurs ont conçu un mécanisme compact composé d’un train d’engrenages non circulaires et de deux bras de préhension des plants. Le porte-satellites central et l’engrenage solaire non circulaire tournent ensemble, tandis que deux engrenages planétaires non circulaires, chacun fixé à un bras de préhension, tournent en réponse. Lorsque le porte-satellites tourne, chaque bras suit une trajectoire soigneusement profilée : il se déplace lentement et presque en ligne droite lors de la saisie et de l’extraction du plant, puis le balance jusqu’à la zone de plantation en le redressant progressivement, et enfin le pousse dans un guide avant de revenir chercher le plant suivant. Les simulations numériques ont montré que la trajectoire et la vitesse à l’extrémité du bras correspondaient étroitement à la trajectoire cible et maintenaient les forces de traction et de poussée quasiment alignées avec la direction de croissance naturelle du plant, réduisant ainsi les flexions et les ruptures.
Du modèle virtuel au mouvement réel
L’équipe a ensuite construit un prototype physique en utilisant les profils d’engrenages et les dimensions de bras optimisés. Ils ont assemblé le train d’engrenages non circulaires, la came, le carter et les bras sur un banc d’essai et ont entraîné le mécanisme à des vitesses de travail. À nouveau, à l’aide d’une caméra à haute vitesse, ils ont enregistré le mouvement réel des bras et l’ont comparé à la trajectoire planifiée. Le mouvement réel s’est largement superposé à la trajectoire idéale, confirmant que la nouvelle conception et la méthode d’optimisation par matrice de trajectoire fonctionnaient comme prévu. Les vitesses mesurées lors de la prise des plants étaient modestes, favorisant la précision et réduisant les dommages, tandis que le mouvement de poussée était plus rapide, aidant à éviter que les plants ne soient traînés en arrière ou perturbés.
Ce que cela signifie pour les riziculteurs
En termes pratiques, ce travail montre qu’il est possible de concevoir une machine qui imite le mouvement courbé et soigneux de la main des semeurs expérimentés, tout en opérant bien plus rapidement et de façon plus régulière que la main-d’œuvre humaine seule. En combinant un système d’engrenages non circulaires avec une description des mouvements basée sur les données, les auteurs ont créé un mécanisme de repiquage capable de saisir, transporter et placer efficacement des plants de riz en pot tout en les maintenant droits et largement indemnes. Pour les agriculteurs, une telle technologie pourrait soutenir des rendements plus élevés et des plantations plus fiables sur de grandes parcelles, en apportant les avantages du repiquage manuel à un système entièrement mécanisé.
Citation: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Mots-clés: repiquage du riz, lancement de plants, engrenages non circulaires, optimisation de trajectoire, machinerie agricole