Clear Sky Science · pt
Projeto ideal guiado por matriz de trajetória de mecanismo de lançamento de mudas por trem de engrenagens não circulares para mudas em vasos de arroz
Por que lançar mudinhas é importante
Plantar arroz manualmente é um processo lento, mas é delicado com as plantas jovens e ajuda sua recuperação rápida e bom desenvolvimento. À medida que as fazendas aumentam e os custos de mão de obra sobem, engenheiros procuram máquinas capazes de transplantar mudas de arroz com o mesmo cuidado e precisão de um operador habilidoso. Este estudo descreve um novo mecanismo de plantio que imita o movimento do braço humano enquanto usa um sistema de engrenagens engenhoso e um “mapa” matemático do movimento para lançar mudas em vasos de arroz de forma precisa e suave no campo.
Da mão do agricultor ao braço robótico
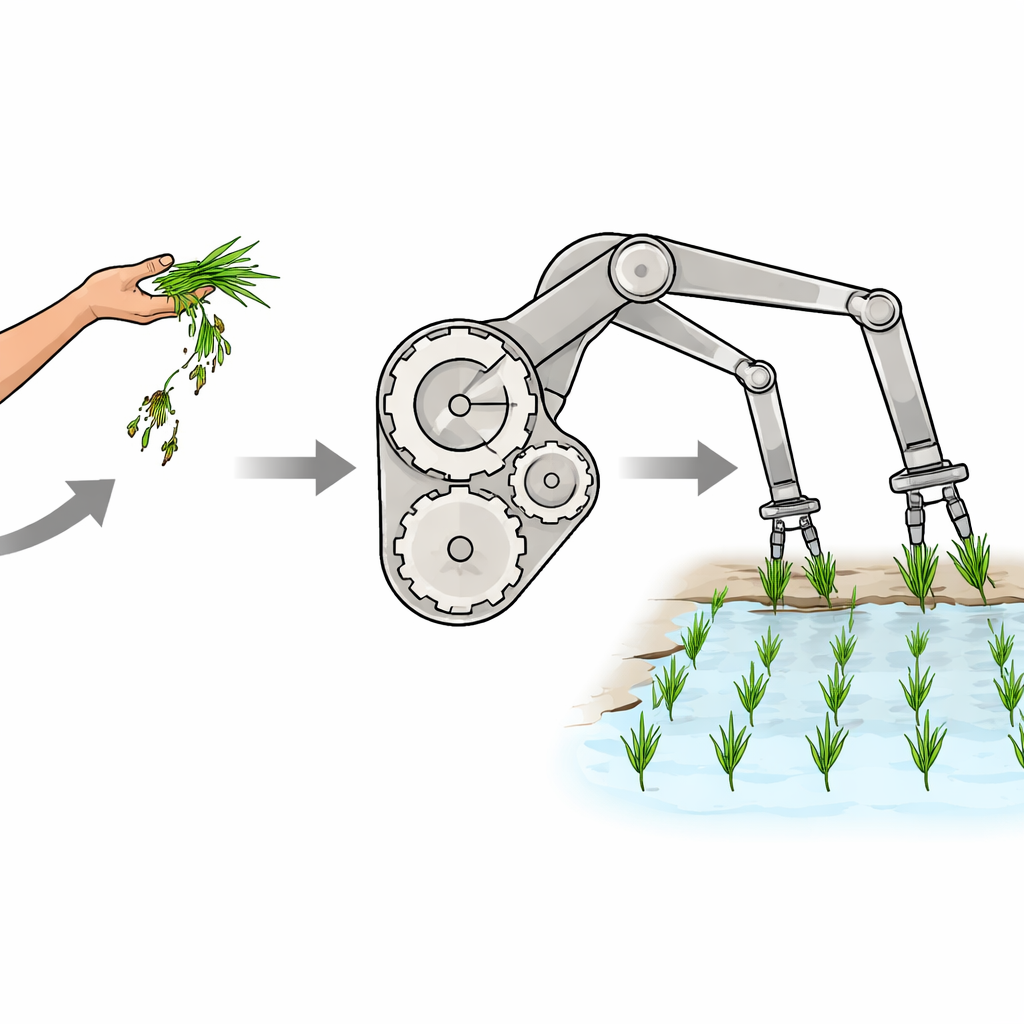
Os pesquisadores começaram com uma pergunta simples: o que exatamente faz o braço de uma pessoa ao pegar e lançar uma muda de arroz? Usando uma câmera de alta velocidade, registraram a mão e o cotovelo de um trabalhador a 300 quadros por segundo. Dividiram a ação em etapas: agarrar a muda, retirá-la da bandeja, transportá-la até o local certo, soltá-la para que siga adiante e, em seguida, retornar a mão à posição inicial. Quando esses movimentos foram traçados, a mão seguiu um caminho marcante, em forma de laço, que os autores descrevem como “em forma de pinguim”, com o ângulo da mão mudando para manter a muda majoritariamente ereta e minimizar dobras ou torções.
Transformando o movimento natural em um trajeto mecânico
Para capturar esse movimento em uma máquina, a equipe tratou o braço como uma estrutura simples de dois elos que pivota no ombro e no cotovelo. Em termos de engenharia, trata-se de um mecanismo em cadeia aberta com duas articulações, mas a ideia central é direta: um segmento gira a partir do corpo e o segundo gira a partir do primeiro, juntos traçando um caminho parecido com o seguido pela mão. O desafio é que, sem controle, esse sistema tem muitas maneiras de se mover, a maior parte das quais não seria adequada para as mudas. Os autores resolveram isso usando um trem de engrenagens não circulares — engrenagens cujos contornos não são redondos — para controlar como as articulações giram, forçando a ponta do braço a traçar algo muito próximo ao trajeto inspirado no humano.
Deixar os dados guiarem o projeto
Projetar tal mecanismo não é apenas desenhar curvas a olho. Há dezenas de parâmetros de projeto, incluindo como as engrenagens são moldadas, como são montadas e o comprimento dos braços. Esses fatores interagem de maneiras complexas. Para lidar com isso, os autores criaram uma nova forma de descrever o movimento como uma “matriz de trajetória”. Primeiro, tomaram o caminho ideal da mão e o padronizaram — removendo efeitos de tamanho, posição e rotação — e então o sobrepuseram a uma grade. As células da grade que continham o trajeto foram marcadas, transformando o movimento em um padrão de zeros e uns. Fizeram o mesmo para muitos trajetos de máquinas candidatos em toda a gama de configurações possíveis. Ao comparar essas matrizes, puderam medir rapidamente o quanto qualquer projeto se aproximava do caminho semelhante ao humano e usar essa pontuação para orientar o software de otimização em direção à melhor solução geral.
Construção e teste do mecanismo de lançamento
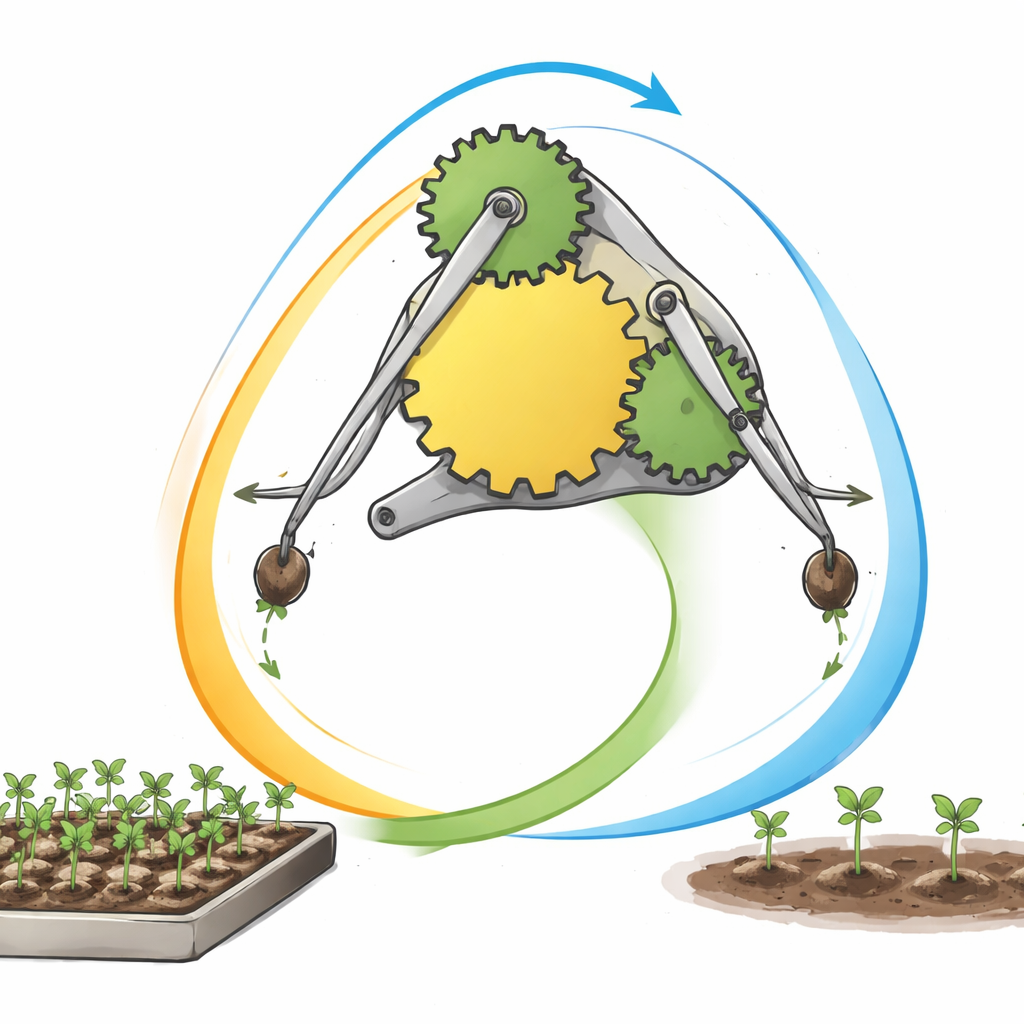
Com os parâmetros otimizados em mãos, os pesquisadores projetaram um mecanismo compacto composto por um conjunto de engrenagens não circulares e dois braços coletadores de mudas. O portador central e a engrenagem solar não circular giram juntos, enquanto duas engrenagens planetárias não circulares, cada uma fixa a um braço coletor, giram em resposta. À medida que o portador gira, cada braço segue um trajeto cuidadosamente moldado: move-se lentamente e quase em linha reta enquanto prende e puxa a muda, depois a balança até a zona de plantio enquanto a inclina gradualmente para ficar ereta e, finalmente, a empurra para um dispositivo guia antes de retornar para a próxima muda. Simulações por computador mostraram que o trajeto e a velocidade na ponta do braço corresponderam de perto à trajetória alvo e mantiveram as forças de tração e empuxo quase alinhadas com a direção natural de crescimento da muda, reduzindo dobras e quebras.
Do modelo virtual ao movimento no mundo real
A equipe então construiu um protótipo físico usando os perfis de engrenagem e as dimensões de braço otimizados. Montaram o trem de engrenagens não circular, a came, a carcaça e os braços em uma bancada de testes e acionaram o mecanismo em velocidades de trabalho. Novamente usando uma câmera de alta velocidade, registraram o movimento real do braço e o compararam com o trajeto planejado. O movimento real coincidiu fortemente com a trajetória ideal, confirmando que o novo projeto e o método de otimização por matriz de trajetória funcionaram conforme esperado. As velocidades medidas durante o recolhimento das mudas foram moderadas, ajudando a precisão e reduzindo danos, enquanto o movimento de empurrar foi mais rápido, ajudando a evitar que as mudas fossem arrastadas para trás ou perturbadas.
O que isso significa para os produtores de arroz
Em termos práticos, este trabalho mostra que é possível projetar uma máquina para imitar o movimento curvo e cuidadoso da mão de plantadores de arroz experientes, operando muito mais rápido e com mais consistência do que a mão de obra humana sozinha. Ao combinar um sistema de engrenagens não circulares com uma descrição de movimento orientada por dados, os autores criaram um mecanismo de transplante capaz de pegar, transportar e posicionar mudas em vasos de arroz de forma eficiente, mantendo-as eretas e, em grande parte, intactas. Para os agricultores, essa tecnologia pode apoiar maiores produtividades e um plantio mais confiável em grandes áreas, trazendo os benefícios do transplante manual para um sistema totalmente mecanizado.
Citação: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Palavras-chave: replantio de arroz, lançamento de mudas, engrenagens não circulares, otimização de trajetória, maquinário agrícola