Clear Sky Science · nl
Trajectoriematrix-gestuurde optimale ontwerp van een niet-circulair tandwieloverbrengingsmechanisme voor het werpen van rijstpotzaailingen
Waarom het werpen van kleine planten ertoe doet
Rijst met de hand planten is traag, maar het is zacht voor jonge planten en helpt hen snel te herstellen en goed te groeien. Naarmate akkers groter worden en arbeidskosten stijgen, zoeken ingenieurs naar machines die rijstzaailingen met dezelfde zorg en precisie kunnen planten als een ervaren arbeider. Deze studie beschrijft een nieuw plantmechanisme dat de beweging van de menselijke arm nabootst en daarbij gebruikmaakt van een slim tandwielsysteem en een wiskundige "plattegrond" van beweging om rijstpotzaailingen nauwkeurig en voorzichtig het veld in te werpen.
Van de hand van de boer naar de robotarm
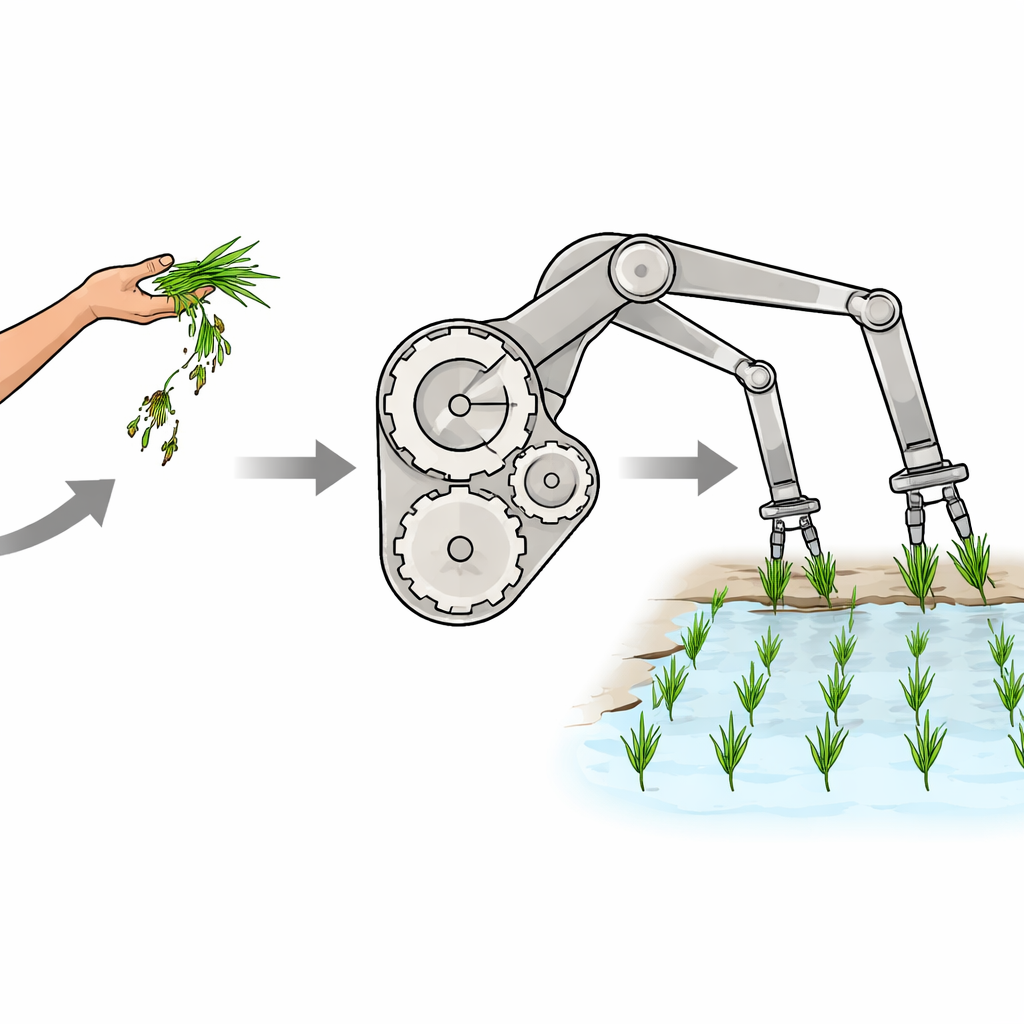
De onderzoekers begonnen met een simpele vraag: wat doet iemands arm precies als die een rijstzaailing pakt en werpt? Met een hogesnelheidscamera registreerden ze de hand en de elleboog van een werker met 300 frames per seconde. Ze verdeelden de handeling in fasen: het grijpen van de zaailing, het uit de tray trekken, het naar de juiste plek brengen, het loslaten zodat deze vooruit beweegt, en het terugbrengen van de hand naar het begin. Wanneer deze bewegingen werden uitgezet, volgde de hand een kenmerkend, gelust pad dat de auteurs beschrijven als "pinguïnvormig", waarbij de hoek van de hand verandert om de zaailing grotendeels rechtop te houden en buigen of draaien te minimaliseren.
Het omzetten van natuurlijke beweging naar een machinepad
Om deze beweging in een machine vast te leggen, beschreven het team de arm als een eenvoudige tweelinkstructuur die draait bij schouder en elleboog. In technische termen is dit een open ketenmechanisme met twee gewrichten, maar het kernidee is eenvoudig: één segment zwaait vanuit het lichaam en het tweede segment zwaait vanaf het eerste, en samen tekenen ze hetzelfde soort pad dat de hand volgt. De uitdaging is dat zo’n systeem op zichzelf vele bewegingsmogelijkheden heeft, waarvan de meeste niet geschikt zouden zijn voor de zaailingen. De auteurs losten dit op door een niet-circulair tandwielstel te gebruiken — tandwielen waarvan de omtrek niet rond is — om te bepalen hoe de gewrichten draaien, waardoor het uiteinde van de arm gedwongen wordt iets te volgen dat sterk lijkt op het door mensen geïnspireerde pad.
Data de ontwerprichting laten bepalen
Het ontwerpen van zo’n mechanisme gaat niet alleen over het met het oog tekenen van krommen. Er zijn tientallen ontwerpparameters, waaronder de vorm van de tandwielen, hoe ze gemonteerd zijn en hoe lang de armen zijn. Deze factoren beïnvloeden elkaar op ingewikkelde manieren. Om dit aan te kunnen, creëerden de auteurs een nieuwe manier om beweging te beschrijven als een "trajectoriematrix." Eerst namen ze het ideale handpad en standaardiseerden het — waarbij effecten van grootte, positie en rotatie werden verwijderd — en legden het vervolgens over een raster. Rastervakken die het pad bevatten werden gemarkeerd, waardoor de beweging veranderde in een patroon van nullen en enen. Ze deden hetzelfde voor veel kandidaat-machinepaden over het volle bereik van mogelijke instellingen. Door deze matrices te vergelijken, konden ze snel meten hoe goed een ontwerp overeenkwam met het mensachtige pad en die score gebruiken om optimalisatiesoftware te sturen naar een algemeen beste oplossing.
Het bouwen en testen van het werpmechanisme
Met de geoptimaliseerde parameters in de hand ontwierpen de onderzoekers een compact mechanisme bestaande uit een set niet-circulaire tandwielen en twee zaailing-grijparmmen. De centrale carrier en het niet-circulaire zonnetandwiel draaien samen, terwijl twee niet-circulaire planetaire tandwielen, elk bevestigd aan een grijparm, reageren en draaien. Terwijl de carrier draait, volgt elke arm een zorgvuldig gevormd pad: hij beweegt langzaam en vrijwel recht tijdens het grijpen en uit de tray trekken van de zaailing, zwaait dan naar de plantzone terwijl hij de zaailing geleidelijk rechtop kantelt, en duwt hem ten slotte in een geleidingsinrichting voordat hij terugkeert voor de volgende zaailing. Computersimulaties toonden aan dat het pad en de snelheid bij de punt van de arm nauw aansloten bij de doeltrajectorie en dat de trek- en duwkrachten vrijwel uitgelijnd waren met de natuurlijke groeirichting van de zaailing, waardoor buigen en breken werd verminderd.
Van virtueel model naar echte beweging
Het team bouwde vervolgens een fysiek prototype met de geoptimaliseerde tandwielprofielen en armafmetingen. Ze monteerden de niet-circulaire tandwieltrein, nok, behuizing en armen op een testbank en lieten het mechanisme op werkingssnelheden draaien. Opnieuw gebruikten ze een hogesnelheidscamera om de werkelijke armbeweging vast te leggen en vergeleken die met het geplande pad. De echte beweging viel sterk samen met de ideale trajectorie, waarmee werd bevestigd dat het nieuwe ontwerp en de trajectoriematrix-optimalisatiemethode werkten zoals bedoeld. De gemeten snelheden tijdens het oppakken van zaailingen waren bescheiden, wat de nauwkeurigheid verbeterde en schade verminderde, terwijl de duwbeweging sneller was, wat voorkwam dat zaailingen naar achteren werden meegesleept of verstoord.
Wat dit betekent voor rijstboeren
In praktische zin laat dit werk zien dat een machine zo kan worden ontworpen dat ze de zorgvuldige, gebogen handbeweging van vaardige rijstplanters nabootst, terwijl ze veel sneller en consistenter werkt dan menselijke arbeid alleen. Door een niet-circulair tandwielsysteem te combineren met een data-gedreven beschrijving van beweging, creëerden de auteurs een uitplantmechanisme dat rijstpotzaailingen efficiënt kan pakken, vervoeren en plaatsen terwijl ze rechtop en grotendeels ongedeerd blijven. Voor boeren kan zo’n technologie hogere opbrengsten en betrouwbaardere aanplant op grote percelen ondersteunen, waardoor de voordelen van handmatig uitplanten in een volledig gemecaniseerd systeem worden gebracht.
Bronvermelding: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
Trefwoorden: rijst uitplanten, zaailingwerpen, niet-circulaire tandwielen, trajectoptimalisatie, landbouwmachines