Clear Sky Science · ar
تصميم مثالي موجه بمصفوفة المسار لآلية رمي شتلات مجموعة تروس غير دائرية لشتلات الأرز في الأواني
لماذا يهم رمي النباتات الصغيرة
الزراعة اليدوية للأرز بطيئة، لكنها لطيفة على النباتات الصغيرة وتساعدها على التعافي بسرعة والنمو جيداً. مع اتساع الحقول وارتفاع تكاليف العمالة، يسعى المهندسون إلى آلات تستطيع زرع شتلات الأرز بنفس عناية ودقة العامل الماهر. تصف هذه الدراسة آلية زرع جديدة تحاكي حركة ذراع الإنسان باستخدام نظام تروس مبتكر و"خريطة طريق" رياضية للحركة لرمي شتلات الأرز في الأواني بدقة ونعومة.
من يد المزارع إلى ذراع آلي
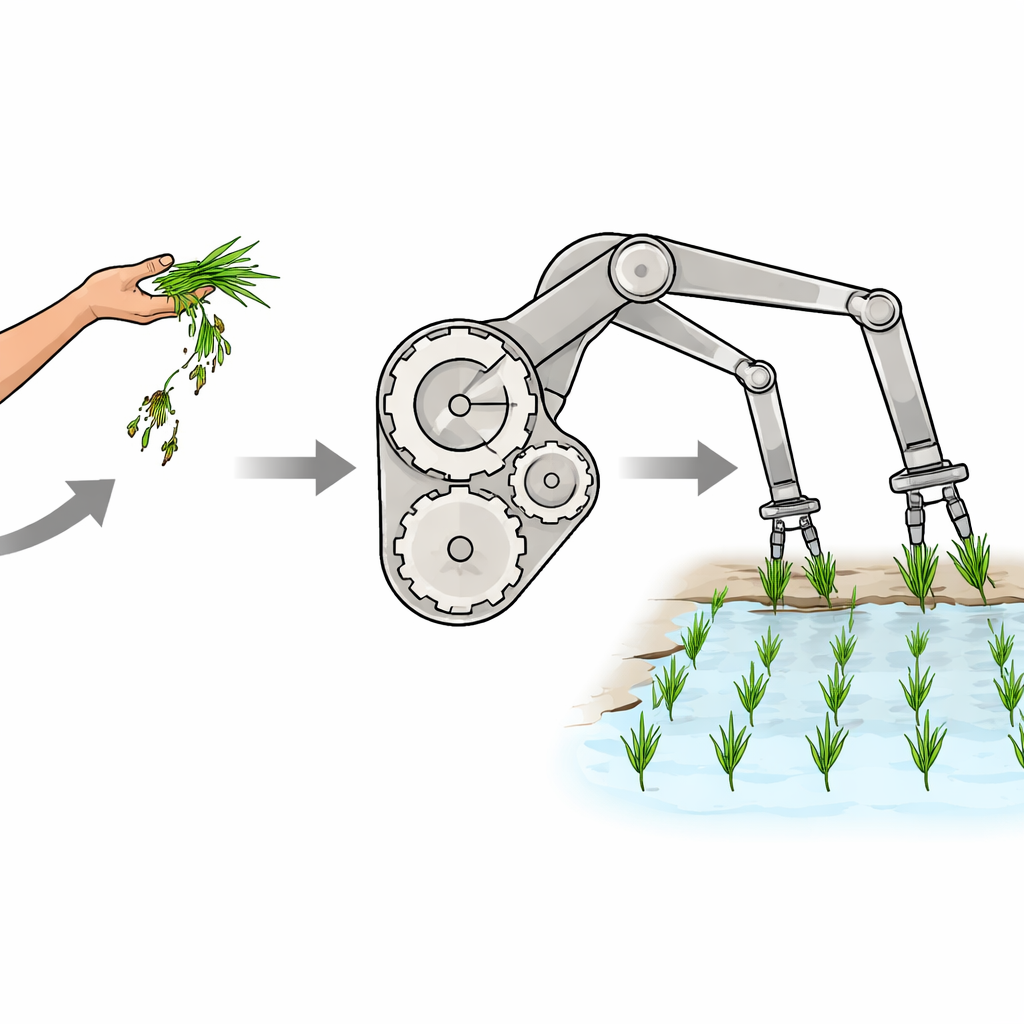
بدأ الباحثون بسؤال بسيط: ماذا تفعل ذراع الإنسان بالضبط عندما تلتقط وتلقي شتلة الأرز؟ باستخدام كاميرا عالية السرعة، سجلوا حركة اليد والمرفق بمعدل 300 إطار في الثانية. قسموا الحركة إلى مراحل: الإمساك بالشتلة، سحبها من صينية الزراعة، نقلها إلى الموضع الصحيح، إفلاتها بحيث تتحرك للأمام، ثم إعادة اليد للبداية. عندما تتبعت هذه الحركات، اتبعت اليد مساراً مميزاً على شكل حلقي وصفه المؤلفون بأنه "على شكل بطريق"، مع تغير اتجاه اليد للحفاظ على استقامة الشتلة قدر الإمكان وتقليل الانحناء أو الالتواء.
تحويل الحركة الطبيعية إلى مسار آلي
لالتقاط هذه الحركة في آلة، اعتبر الفريق الذراع كهيكل بسيط ذو رابطين يدوران عند الكتف والمرفق. بمصطلحات هندسية، هذا آلية سلسلة مفتوحة ذات مفصلين، لكن الفكرة الأساسية بسيطة: يتحرك الجزء الأول من الجسم، والجزء الثاني يتحرك من الطرف الأول، معاً يتتبعان نفس نوع المسار الذي تتبعه اليد. التحدي أن هذا النظام لو تُرك دون ضبط يمكن أن يتحرك بعدة طرق، أغلبها غير مناسب للشتلات. حل المؤلفون ذلك باستخدام مجموعة تروس غير دائرية — تروس لا تكون محيطاتها مستديرة — للتحكم في دوران المفاصل، مما يجبر طرف الذراع على تتبع مسار قريب جداً من المسار المستوحى من البشر.
السماح للبيانات بتوجيه التصميم
تصميم مثل هذه الآلية ليس مجرد رسم منحنيات بالعين. هناك عشرات معايير التصميم، بما في ذلك شكل التروس، طريقة تثبيتها، وطول الأذرع. هذه العوامل تتداخل بطرق معقدة. لمعالجة ذلك، أنشأ المؤلفون طريقة جديدة لوصف الحركة باسم "مصفوفة المسار". أولاً، أخذوا مسار اليد المثالي وقاموا بتقييسه — بإزالة تأثيرات الحجم والموقع والدوران — ثم وضعوه على شبكة. تم تمييز خلايا الشبكة التي احتوت المسار، محولين الحركة إلى نمط من الأصفار والآحاد. فعلوا الشيء نفسه للعديد من المسارات الآلية المحتملة عبر نطاق الإعدادات. بمقارنة هذه المصفوفات، استطاعوا قياس مدى تطابق أي تصميم مع المسار الشبيه بالبشر بسرعة، واستخدام تلك النتيجة لتوجيه برامج التحسين نحو أفضل حل إجمالي.
بناء واختبار آلية الرمي
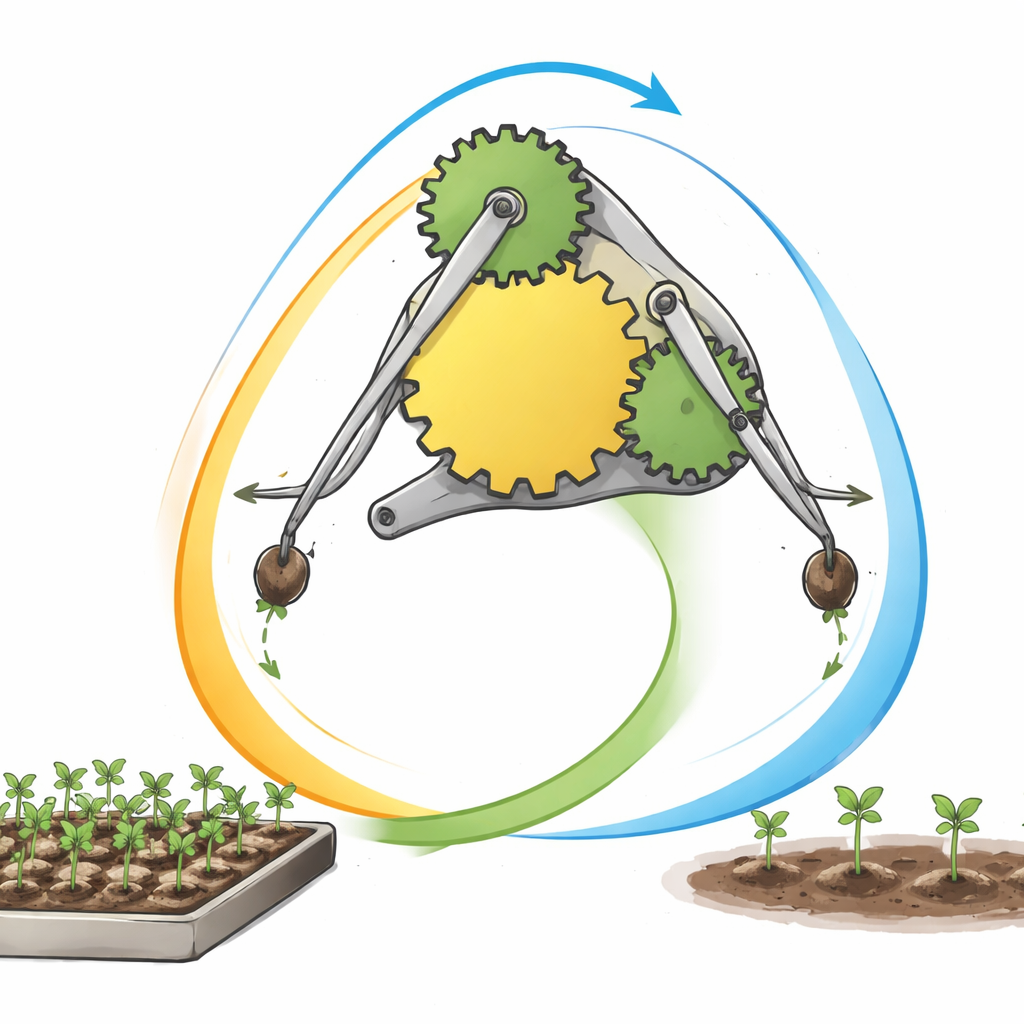
بالمعلمات المُحسّنة في اليد، صمم الباحثون آلية مدمجة تتألف من مجموعة تروس غير دائرية وذراعين لالتقاط الشتلات. الحامل المركزي والتروس الشمسية غير الدائرية يدوران معاً، بينما تدور تروس كوكبية غير دائرية، كل واحدة مثبتة بذراع الالتقاط، استجابة لذلك. مع دوران الحامل، يتبع كل ذراع مساراً مشكلاً بعناية: يتحرك ببطء وبشكل شبه مستقيم أثناء الإمساك وسحب الشتلة، ثم يتأرجح إلى منطقة الزرع مع إمالة تدريجية لتقويمها، ويضغطها أخيراً داخل جهاز إرشادي قبل العودة للشتلة التالية. أظهرت المحاكاة الحاسوبية أن المسار والسرعة عند طرف الذراع يتطابقان عن كثب مع المسار الهدف ويحافظان على محاذاة قوى السحب والدفع مع اتجاه نمو الشتلة الطبيعي، مما يقلل الانحناء والكسر.
من النموذج الافتراضي إلى الحركة الواقعية
ثم بنى الفريق نموذجاً أولياً فعلياً باستخدام ملفات التروس والأبعاد المحسّنة للأذرع. جمعوا مجموعة التروس غير الدائرية، الحامل، الغلاف، والأذرع على مقعد اختبار وقادوا الآلية بسرعات عمل. وباستخدام كاميرا عالية السرعة مرة أخرى، سجلوا الحركة الفعلية للذراع وقارنوها بالمسار المخطط. تداخلت الحركة الحقيقية بقوة مع المسار المثالي، مؤكدة أن التصميم الجديد وطريقة تحسين مصفوفة المسار عملتا كما هو مقصود. كانت السرعات المقاسة أثناء التقاط الشتلات معتدلة، مما ساعد على الدقة وتقليل الضرر، بينما كانت حركة الدفع أسرع، مما منع سحب الشتلات للخلف أو إزعاجها.
ماذا يعني هذا لمزارعي الأرز
من الناحية العملية، تُظهر هذه الدراسة أنه يمكن تصميم آلة لتحاكي حركة اليد المنحنية والحذرة لزارعي الأرز المهرة، مع العمل بسرعة واتساق يفوقان العمل البشري وحده. من خلال الجمع بين نظام تروس غير دائري ووصف الحركة المعتمد على البيانات، أنشأ المؤلفون آلية للزراعة يمكنها التقاط وحمل ووضع شتلات الأرز في الأواني بكفاءة مع إبقائها منتصبة وسليمة إلى حد كبير. بالنسبة للمزارعين، قد تدعم هذه التقنية زيادات في المحصول وزرعاً أكثر موثوقية في الحقول الواسعة، جالبة فوائد الزراعة اليدوية إلى نظام مؤتمت بالكامل.
الاستشهاد: Zhou, M., Wang, G., Xu, T. et al. Trajectory matrix-guided optimal design of non-circular gear train seedling throwing mechanism for rice pot seedlings. Sci Rep 16, 13180 (2026). https://doi.org/10.1038/s41598-026-43135-1
الكلمات المفتاحية: نقل زراعة الأرز, رمي الشتلات, تروس غير دائرية, تحسين المسار, الآلات الزراعية